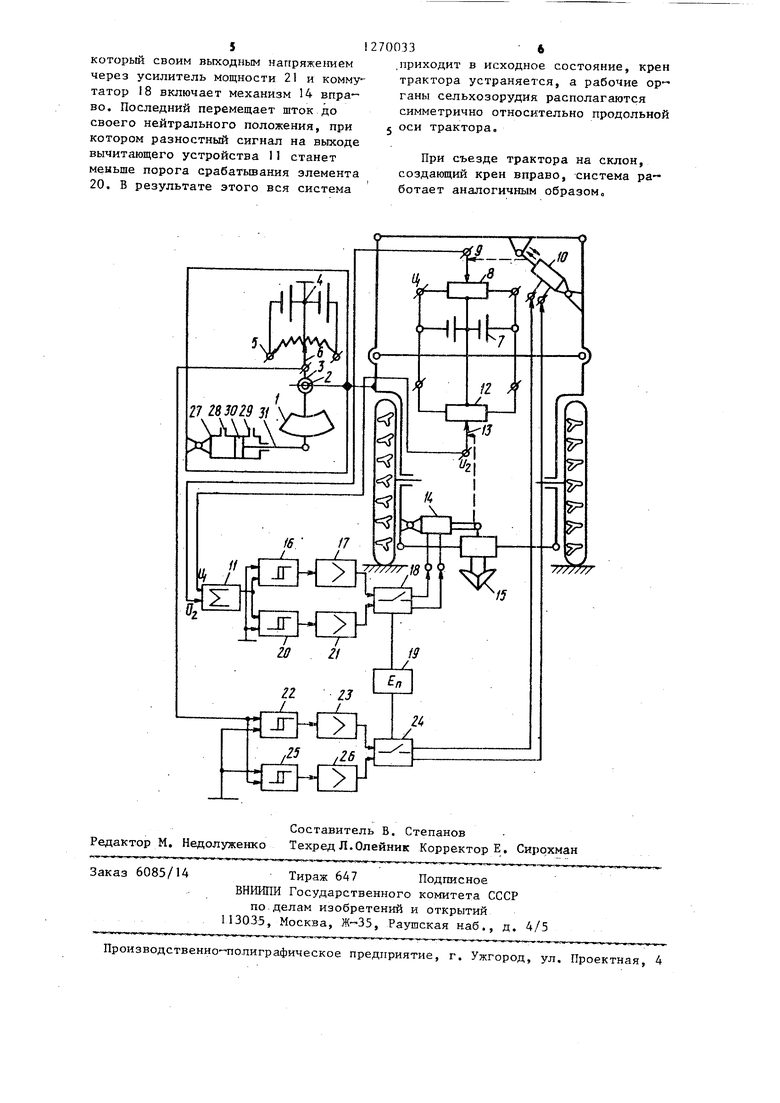
Изобретение относится к устройствам автоматической коррекции положв ния остова колесных транспортных ма-пшн при их движении поперек склона, особенно к устройствам коррекции положения остова крутосклонных тракто ров при выполнении сельскохозяйстт венйых работ. Целью изобретения является улучшение условий труда водителя путем обеспечения возможности оперативного изменения величины стабилизирующего воздействия со стороны рабочего орга на сельхозорудия на трактор дл:я коррекции его траектории движения, а также снижения металлоемкости. На чертеже приведена автоматичес кая .система коррекции положения осто ва трактора на склоне« Система содержит маятник I, который неподвижно закреплен на валу 2, причем продольная ось вала параллель на продольной оси трактора, а вал подвешен в узлах подвески 3, источник питания 4, подключенный к потенциометру 5 с подвижным элементом б, жестко связанным с валом маятника 2, Кроие того, имеется источник 7 питания, подключенный к потенциометру 8 с подвижным элементом 9, который механически связан со штоком электромеханического исполнительного устрой ства 10 для изменения положения осто ва трактора, а электрически соединен с одним из входов вычитающего устрой ства 11, потенциометр 12, также подключенный к источнику 7 гштания, а подвижный элемент 13 указанного потенциометра механически соединен со штоком электромеханического устройства 14 для перемещения рабочего органа навесного сельхозорудия 15, а электрически соединенный с другим вх дом вычитающего устройства 11, выход которого соединен с входом пороговог элемента 16 (триггер Шмитта - микросхема- К180ТШ1Г) , соединенного через усилители 17 мощности (например, уси литель на транзисторе с включенной в . его коллекторную цепь обмоткой элект ромагнита реле), с коммутатором 18 (например, электромагнитные реле), соединенного с источником 19 питания выход которого соединен с входом исполнительного механизма 14, пороговы элемент 20 (триггер Шмитта - микросхема К180ТЛ1Г), вход которого соединен с выходом вычитающего устройст 1 3 ва П и через усилитель 21 мощности (усилитель на транзисторе с включенной в его коллекторную цепь обмоткой электромагнитного реле) соединен с другим входом коммутатора 18 (напри мер,.электромагнитные реле)„ Кроме того, система содержит пороговый эле мент 22 (триггер Шмитта - микросхема™ К180ТЛ1Г), вход которого соединен с подвижным элементом 6 потенциометра 5, а выход подключен через усилитель мощности 23 (усилитель на транзисторе с включенной в его коллекторную цепь обмоткой электромагнитного реле) к одному из входов коммутатора 24 (Ha- пример, электромагнитные реле), соединенного также с источником 19 питания, .пороговый элемент 25 .(триггер Шмитта - микросхема К180ТЛ1р), подключенный своим входом к подвижному элементу 6 потенциометра 5, а своим выходом - к входу усилителя 26 мощности (усилитель на транзисторе с включенной в его коллекторную цепь обмоткой электромагнитного реле) соединенного своим выходом с другим входом коммутатора 24 (например, электромагнитные реле) и пневматический демпфер с цилиндром 27, соединенным с остовом трактора с калиброванными отверстиями 28 и 29, поршнем 30 со штоком 31, соединенным с маятником 1„ Автоматическая система работает следующим образом, При движении крутосклонного трак- тора по горизонтальной опорной поверхности маятник удерживает подвижный элемент 6 потенциометра 5 в его среднем положении. При этом напряже ние, снимаемое с подвижного элемента 6 относительно средней точки, равно нулю. Это значит, что оба пороговых элемента 22 и 25 находятся в исходном положении, их выходные напряжения близки к нулю и исполнительный механизм 0,. соединенный через ком мутатор 24, управляемый через усилители мощности 23 и 26 пороговыми элемб;нтами 2 и 25, разобщен с источником 19 питанкА и находится в своем нейтр,альном положении. При въезде трактора не. склон и возник новеник крена (например, влево), маятник; стремясь сохранить свое вертикальное поло :ение,.. смещает под вижный элемент 6 готенциометра 5 вправо, В результате этого потенциал на подвижном элементе 6 повысится При повышении напряжения, снимаемого с указанного подвижного элемента до величины, превосходящей порог сраба тывания элементов 22 и 25, пороговый элемент 22 срабатьгеает и вьщает на своем выходе напряжение, близкое к напряжению питания микросхемы Это напряжение появляется на входе усили теля 23 мощности, коммутатор 24 обе спечивает включение исполнительного механизма 10 вправоi Шток червя ного редуктора исполнительного уст ройства 10 перемещается изменяя по ложение трактора до тех пор, пока крен не будет устранен и подвижный элемент 6 потенциометра 5 не придет в свое нейтральное положение под воздействием маятника 1„ После этого пороговый элемент 22 придет в исход ное состояние и перемещение штока ис полнительного устройства 10 прекра щается. Указанный шток, воздействуя при своем перемещении на подвижный элемент 9 другого потенциометра 8, смещает его вправо, что приводит к появлению некоторого напряжения на выходе вычитающего устройства 11, один из входов которого соединен с подвижным элементом 9 потенциометра 8, а другой вход соединен с подвижны элементом 13 потенциометра 14, кото рый находится пока в нейтральном по ложении и напряжение на подвижном элементе 13 равно нулю, В результате этого включается пороговый элемент 16 и через усилитель 17 мощности и коммутатор 18 включает исполнитель ный механизм l4 влево Шток ука занного механизма, перемещаясь зле во, смещает подвижный элемент 13 по тенциометра 12 до тех пор, пока на пряжение на нем не повысится до не которой величины и разность напряже НИИ на подвижном элементе 13 и под вижном элементе 9 потенциометра 8 не станет меньше порога срабатывания элемента 16 о После этого пороговый элемент 16 приходит в исходное сос тояние и отключает электродвигатель исполнительного механизма . 14. Таким образом, следящая система обеспечи вает строгое соответствие перемеще ния рабочего органа 15 сельхозорудия перемещению штока механизма 10, а следовательно, и крену трактора. Диапазон перемещения штока механизма 14 определяется напряжением питания потенциометров 8 и 12. Устойчивость системы обеспечивает ся наличием демпфирующего эвена в виде червячного редуктора, нагружен ного значительными силами сопротивлв ния, малым моментом инерции роторов электродвигателей исполнительных ме ханиэмов и наличием в них фрикцион ного электрического тормоза, включаю щегося при обесточивании электродви гателя. Перемещение рабочего органа сель хозорудия лап культиватора, например, вправо от продольной оси трактора приводит к появлению разворачивающее го момента в плоскости склона и ком пенсации отклонения фактической линии движения трактора от его продольной оси и к предотвращению сползания трактора под воздействием тангенци альной составляют ;ей массы трактора, передвигающегося поперек склона, От клонение рабочего органа сельхозору дия осуществляется в пределах, огрн ничейных агротехническими требованиями к обработке междурядий пропашных культур. При съезде со склона на горизонтальную поверхность измененное положение остова трактора, соответствующее углу склона, создает крен трактора в обратную сторону на тот же угол, что приводит к отклонению подвижного элемента 6 потенциометра 5 влево, появлению напряжения обратного знака на входе пороговых элемен тов 22 и 25, срабатьшанию порогового элемента 25 и в конечном итоге к включению через усилитель 26 мощности и коммутатор 24 исполнительного механизма 10. Последний изменяет положение остова трактора до тех пор, пока крен трактора ликвидируется и пороговый элемент 25 не придет в исходное состояние. Шток механизма 10, перемещаясь, сместит подвижный элемент 9 потенциометра 8 к его нейтральному положению. В итоге напряжение на нем приблизится к нулю относительно средней точки. Напряжение на подвижном элементе 13 потенциометра 12 станет ниже напряжения, снимаемого с подвижного элемента 9 потенциометра 8, что приводит к появлению разностного сигнала обратного знака на выходе вычитающего устройства 11 и включению порогового элемента 20,
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат-стабилизатор крутосклонного транспортного средства | 1981 |
|
SU1031802A1 |
| Автомат-стабилизатор крутосклонногоТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU816801A1 |
| Механизм выравнивания крутосклонного трактора | 1981 |
|
SU1031800A2 |
| Механизм выравнивания крутосклонного трактора | 1980 |
|
SU893594A1 |
| Крутосклонный трактор | 1986 |
|
SU1461678A1 |
| Транспортное средство для работы на склонах | 1982 |
|
SU1133126A1 |
| Автомат-стабилизатор крутосклонного транспортного средства | 1980 |
|
SU948698A1 |
| Маятниковый датчик крена крутосклонного транспортного средства | 1979 |
|
SU870206A1 |
| Автомат-стабилизатор | 1982 |
|
SU1049271A1 |
| Колесное транспортное средство для работы на склонах | 1981 |
|
SU986815A1 |
АВТОМАТИЧЕСКАЯ СИСТЕМА КОРРЕКЦИИ ПОПЕРЕЧНОГО КРЕНА КРУТОСКЛОННОГО ТРАКТОРА, имеющего раму в виде шарнирного параллелограмма, содержащая датчик положения остова трактора в виде маятника и механизмы изменения положения остова трактора и положения рабочего органа сельхозорудия,. отличающаяся тем, что, с целью улучшения условий труда водителя путем обеспечения возможности оперативного изме нения величины стабилизирующего воздействия со стороны рабочего органа сельхозорудия на трактор для коррекции его траектории движения, она снабжена потенциометрами, вычитающим устройством, пороговыми элементами, усилителями мощности с коммутатора -ми, причем один пЬтенциометр связан с маятником, другой - с механизмом изменения положения остова трактора, а третий - с механизмом изменения . положения рабочего органа сельхоз- орудия, при этом потенциометр, связанный с механизмом изменения положения рабочего органа сельхозорудия, подключен к входу вычитающего устройства, другой вход которого соединен с подвижным элементом потенциометра, связанного с механизмом изменения по(Л ложения остова трактора, а выход соединен через усилители мощности с коммутатором, соединенным электричес ки с исполнительным механизмом изме- нения положения остова трактора, а . потенциометр, связанный с маятником isd своим подвижным элементом, соединен с входами пороговых элементов, вьг ходы которых соединены через усилители мощности с коммутатором, соединенным электрически с механизмом из: со менения положения остова трактора
| Крутосколонный машинно-тракторный агрегат | 1980 |
|
SU869591A2 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
