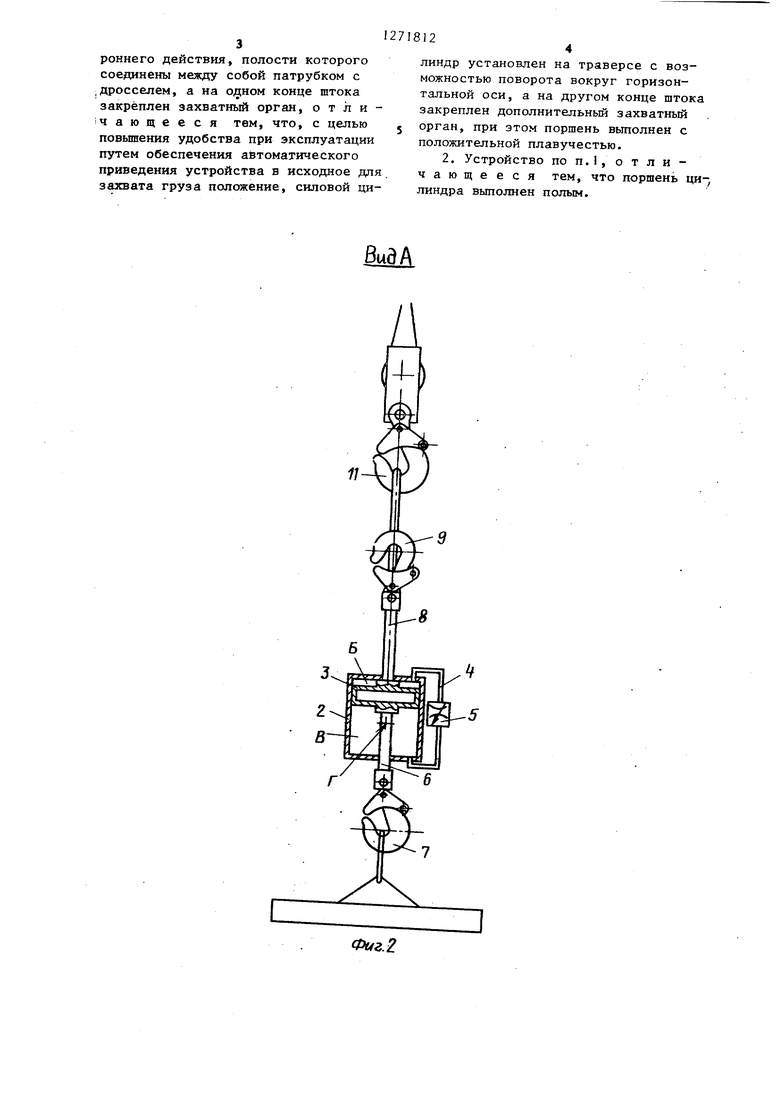
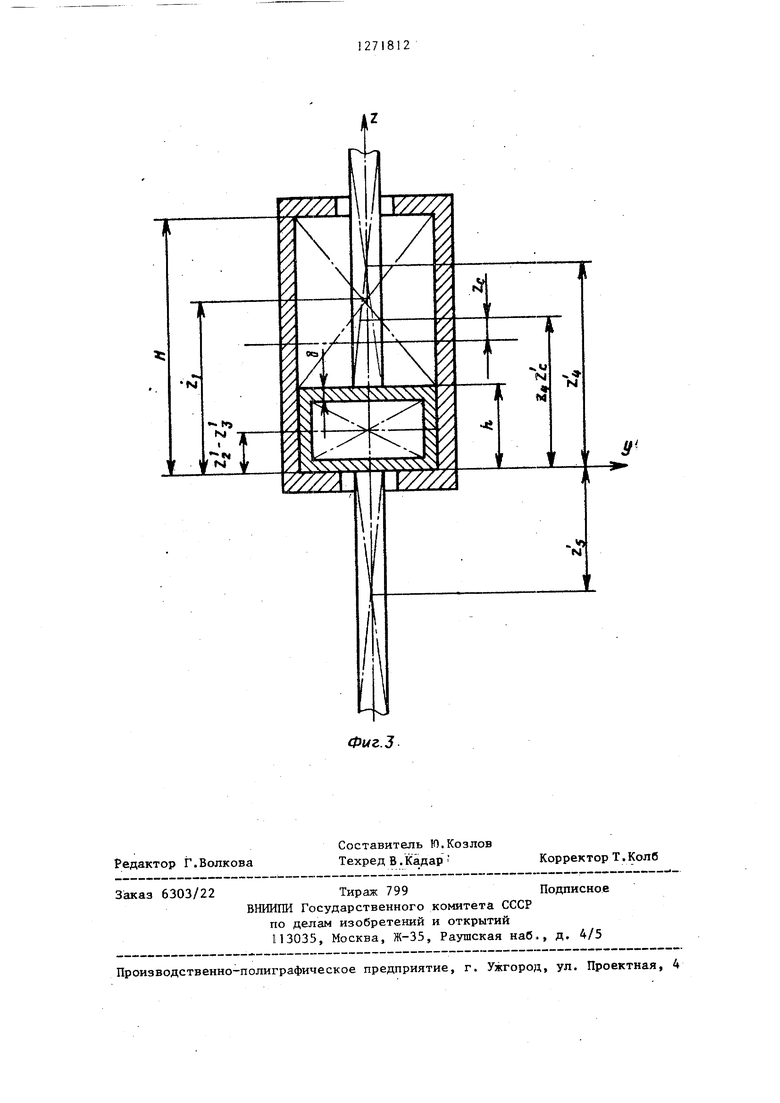
Изобретение относится к машиностроению и может быть использовано на сборочных работах. Целью изобретения является повышение удобства при эксплуатации путем обеспечения автоматического приведения устройства в исходное для захвата груза положение. На фиг.1 изображено грузозахватное устройство, вид сбоку; нафиг.2вид А на фиг.1; на фиг.З - схема рас чета центра тяжести силового цилиндра. Устройство содержит траверсу1, на которой закреплен силовой ци пиндр 2двустороннего действия, в котором полости Б и В с обеих сторон поршня 3заполнены жидкостью к соединены между собой патрубком 4 с дросселем 5. Один-конец 6 штока поршня 3 жестко связан с захватньм органом 7, а другой конец 8 штока - с дополнитель ным захватньм органом 9. Траверса 1 установлена с возможностью поворота вокруг горизонтальной оси В на серьге 10, которая навешена на крюк 11
i ( + fftib-2Sih + fti.iH . t () fj(h-25) + . « ,fif« плотности соответственно жидкости, материала поршня, воздуха, материала штока; Н - высота 1 1пиндра; h - высота поршня; Н lJf(H - 2 2Tf(H - h) -ь Гр„ Устройство работает следующим образом. Перед началом работы перемещают (например, вручную) поршень 3 вверх при полностью открытом дроссе;г1е 5. Затем закрывают дроссель 5 и с помош ю захватного органа 7 перемещают груз к месту выгрузки. Над местом точной установки груза открьшают дроссель 5 и под действием веса груза поршень 3 опускается вниз, застав ляя жидкость перетекать по патрубку 4 и дросселю 5 из полости В в полость Б силового цилиндра 2, Регулируя величину открытия дросселя 5, изменяют скорость перетекания жидкос ти, а следовательно, и скорость опус кания груза на место установки. Пос812грузоподъемного механизма. Поршень 3 цилиндра вьтолнен с положительной плавучестью и полым, а патрубок 4 с дросселем 5 установлен на силовом цилиндре 2 со смещением относительно горизонтальной оси Г. Автоматическое обеспечение приведения устройства в исходное положение вьтолняется при условии Z 0, где Zj, - координата центра тяжести силового цилиндра относительно оси Y (фиг.4). Координата центра тяжести устройства определяется по формуле м , m,Z, - -и , где Ш - масса элемента силбвого цилиндра с координатой Zj( . Вьвделяя в системе силового цилиндра 2 элементы: столб жидкости, полый поршень, объем воздуха в поршне и штоки, определяем координату центра тяжести относительно оси Y, проходящей через дно цилиндра 2 толщина стенки поршня; . 1 - длина штока с .sffnком. Координата центра тяжести относительно оси , проходящей через ось поворота цилиндра 2,определяется из соотношения Т + |,h - 2) h +fum-у Ль ,Л- Н| 0. g(h -28} f ле установки груза освобождают захватный орган 7. Ввиду положительного смещения центра тяжести силового цилиндра 2 относительно оси поворота происходит его разворот на 180. В результате этого изменяется положение захватных органов 7 и 9. При этом, ввиду положительной плавучести полого поршня 3, последний занимает в силовом цилиндре 2 верхнее положение и, таким образом, устройство подготовлено к захвату другого груза. Форму л а изобретения 1. Грузозахватное устройство, содержащее траверсу с цилиндром двустороннего действия, полости которого соединены между собой патрубком с дросселем, а на конце штока закреплен захватный орган, о т л и :ч ающе е с я тем, что, с целью повьшекия удобства при эксплуатации путем обеспечения автоматического приведения устройства в исходное для LBaTa груза положение, силовой цилиндр установлен на траверсе с возможностью поворота вокруг горизонтальной оси, а на другом конце штока закреплен дополнительный захватный орган, при этом поршень вьтолнен с положительной плавучестью.
2. Устройство по п.1, о т л и чающееся тем. что поршень ци-, линдра выполнен полым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемное устройство | 1986 |
|
SU1439068A1 |
| Устройство для плавного опускания груза | 1989 |
|
SU1691263A1 |
| Захватное устройство | 1980 |
|
SU965948A1 |
| Грузозахватное устройство | 1987 |
|
SU1418257A1 |
| Грузоподъемное устройство | 1985 |
|
SU1312060A2 |
| Устройство для отделения листовых заготовок от стопы и подачи их в зону обработки | 1991 |
|
SU1821269A1 |
| УСТРОЙСТВО ДЛЯ ШЛИФОВАНИЯ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ | 1987 |
|
RU1460871C |
| Балансирная траверса | 1981 |
|
SU1013389A1 |
| Подвесной манипулятор | 1977 |
|
SU733844A1 |
| Балансирная траверса | 1981 |
|
SU977360A1 |
Изобретение относится к машиностроению и может быть использовано для сборочных работ. Цель изобретения - повышение производительности путем сокращения вспомогательного времени на захват груза. Устройство содержит траверсу 1 с размещеншл4 на ней силовым цилиндром 2 двустороннего действия, в котором полости А и Б с обеих сторон поршня заполнены жидкостью и соединены между собой патрубком 4 с дросселем 5. При этом силовой цилиндр 2 размещен с возможностью поворота вокруг горизонтальной оси В,а другой конец 8 штока связан с дополнительньм захватным органом 9. Кроме того, поршень выполнен полым, a патрубок 4 с дросселем 5 смещены по горизонтали относительно оси В. Перед началом работы поршень перемещают вверх при полностью открытом дросселе 5. Затем дроссель 5 закрьюают. Груз с помощью захватного органа 7 перемещают к месту выгрузки. Над местом точной установки открывают дроссель 5. Поршень под действием груза опускается. Жидкость перетекает по патрубку 4 и дросселю 5 из полости Б в полость А силового цилиндра 2. Захватный орган 7 освобождают от груза. Силовой цилиндр 2 поворачивается на 180. Поршень, имею1ций положительную плавучесть, поднимается. 1 з.п. ф. 3 ип. (Л л N3 сх В го Фнг.1
ВиЭА
Фиг.2
| ГРУЗОПОДЪЕМНАЯ ТРАВЕРСА ДЛЯ КРАНОВ | 0 |
|
SU253334A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
