00
to
01
Изобретение относится к подъемно- транспортной технике, а именно к грузозахватным устройствам.
Цель изоб{)етения - повышение надежности работы устройства.
На фиг.1 изображена гидравличес- сая схема грузозахватного устройства ina фиг. 2 - положение органов грузо- 13ахватного устройства перед захватом (груза ; на фиг.З - то же, при боковом ;зажатии груза; на фиг.4 - то же, при работе всех захватных органов.
Грузозахватное устройство может содержать два и более захватных ор- гана. На фиг . показана схема одного |захватногр органа. .
Захватный орган состоит из нижнего дополнительного силового цилиндра 1 вертикального зажима, верхнего до- ;полнительного силового цилиндра 2 г вертикального зажима, рамы 3, соеди- :няющей дополнительные силовые цилиндры 1 и 2, и силового цилиндра 4 бокового горизонтального зажима. Силовые цилиндры 1,2 и 4 снабжены возвратными пружинами 5.
Рабочей жидкостью заполнены обе полости дополнительного силового ци- ли ндра 1, верхняя штоковая полость дополнительного силового цилиндра 2 и правая бесштоковая полрсть силового цилиндра 4. Нижняя штоковая полость дополнительного силового цилиндра 1-, верхняя штоковая полость дополнительного силового цилиндра 2 и правая бесштоковая полость силового цилиндра 4 сообщаются с верхней бесштоковой полостью силового цилиндра 1 посредством гидрораспределите- ля 6, причем к верхней бесштоковой полости гидроцилиндра 1 подключен также аккумулятор 7 и датчик 8 давления, управлягаций гддрораспредели- телем 6. С помощью дросселя 9 свя- зана полость дополниЧ ельного силового цилиндра с гидрораспределителем.
Силовые цилиндры 4 жестко закреплены на П-образной траверсе 10, которая снабжена подвеской 11 для навески к манипулятору. На конце што- Ков дополнительных силовых цилиндров 1 и 2 установлены с наклоном к штоку захваты 12 и 13.
При возникновении на штоке дополнительного силового цилиндра 1 усилия, направленного вверх, его поршень, преодолевая сопротивление возвратной пружины, смещается вверх.
вытесняя жидкость из верхней бесштоковой полости. Эта жидкость через окна гидрораспределителя 6 перемещается в нижнюю штоковую полость дополнительного силового цилиндра 1, верхнюю штоковую полость дополнительного силового цилиндра 2. и правую бесшто- ковую полость силового цилиндра 4.
Q Благодаря наличию дросселя 9 количество жидкости, поступающей в силовой цилиндр 4, больше количества жидкости, поступающей в дополнительный силовой цилиндр 2, поэтому шток сило5 вого цилиндра 4 смещается влево до тех пор, пока не встретит на своем пути препятствия. После этого поток жидкости из верхней бесштоковой полости дополнительного силового ци-
0 линдра 1 направляется только в нижнюю щтоковую полость дополнител но- го силового цилиндра 1 и верхнюю штоковую полость дополнительного силового цилиндра 2, при этом шток до5 полнительного силового цилиндра 1 поднимается, а щток дополнительного силового цилиндра 2 опускается 1
Когда шток дополнительного силового цилиндра 2 встречает препятст0 вие на своем пути, он останавливается и давление в гидросистеме начинает расти. По достижении давлением заданной величины датчик 8 давления выключает гидрораспределитель 6, коц торый перекрывает все магистрали, соединякщие полости- силовых цилиндров. ,
Таким образом штоки силовых цилиндров оказываются зафиксированны0 ми - шток дополнительного силового цилиндра 1 не может сместиться вниз и вверх, шток дополнительного- силового цилиндра 2 не может сместиться вверх, шток силового цилиндра 4 не
5 может сместиться вправо. Расфиксадия штоков осуществляется сигналом управления , включающим гидрораспределитель 6. Возможные утечки в гидросистеме компенсируются аккумулятором 7.
Грузозахватное устройство с помощью подвески 11 крепится к манипулятору. Манипул ятор наводит грузозахватное устройство на груз 14 и опускает грузозахватное устройство. Когда грузозахватное устройство коснется своими нижними захватами 13 основания (фиг.2), дальнейшее смещение подвески 11 манипулятора вниз вызовет на ЭТИХ губках, а следовательно.
Я
Фи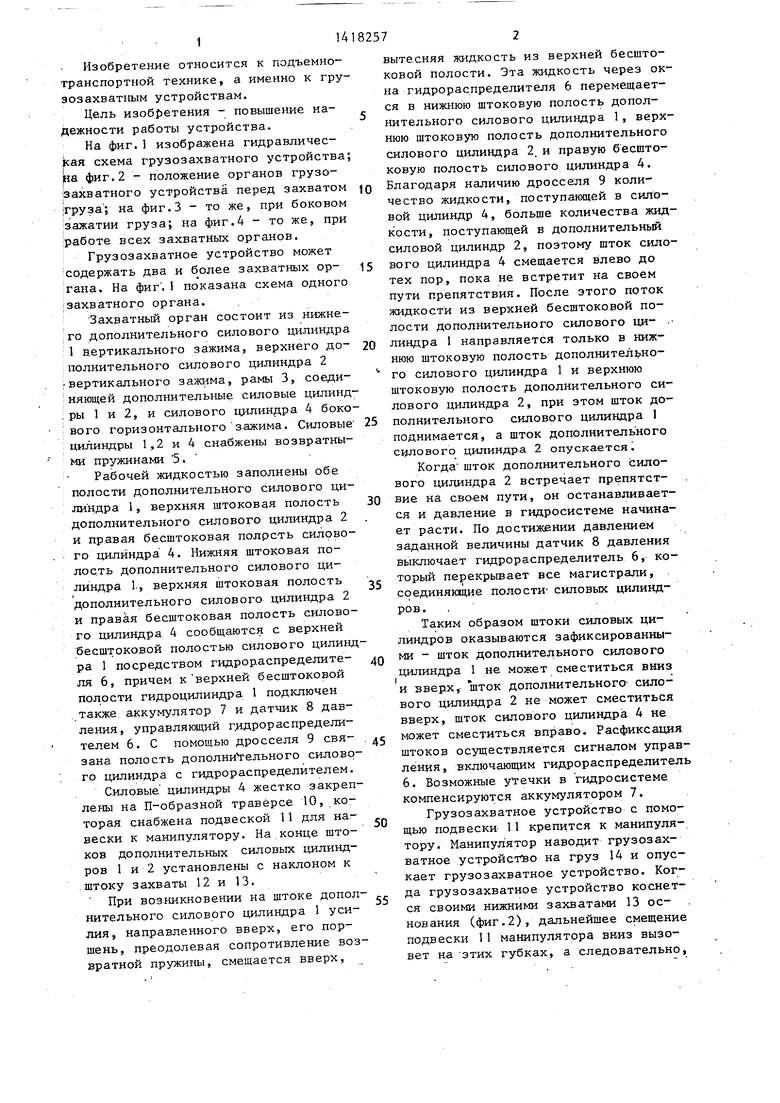

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь | 1980 |
|
SU922032A1 |
| Протяжной автомат | 1987 |
|
SU1426710A1 |
| Портальный погрузчик | 1980 |
|
SU954371A1 |
| Захватное устройство | 1987 |
|
SU1414636A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158207C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ПОГРУЗОЧНО-ТРАНСПОРТНЫЙ АГРЕГАТ | 1999 |
|
RU2150813C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| Гидропривод рабочих органов лесозаготовительной машины (его варианты) | 1984 |
|
SU1259527A1 |
| Манипулятор | 1984 |
|
SU1255553A1 |

Изобретение относится к подъемно-транспортному оборудованию, в частности к грузозахватным устройст- . вам. Цель изобретения - повышение надежности работы. Грузозахватное устройство содержит П-образную траверсу, на концах которой жестко закреплены силовые цилиндры 4 и на концах штоков которой установлены рамь 3, На концах рамы 3 жестко закреплены дополнительные силовые цилиндры I и 2. Устройство снабжено гидрораспределителем 6, связывающим штоковые полости дополнительных силовых цилиндров 1 и 2 с бесштоковой полостью силово-. го цилиндра 4, и датчиком 8 давления, причем поршни всех силовых цилиндров 1,2,4 снабжены пружинами 5. 4 ил.
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 0 |
|
SU369093A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
