При включении MX поворачивают рычаг 16, который приводится в действие от силового механизма. Вместе с ним поворачивается двуплечий рычаг 12, который перемещает ГШМ 11. Она входит в зацепление с кулачками ППМ шестерни 13. При этом замыкается кинематическая цепь MX. Одновременно двуплечий рычаг 12 перемещает ППМ 4. При этом стопорные выступы 1 входят в отверстия впадины 3, чем исключается возможность вращения
1949 ,
вала 5. Для поворота платформы поворачивают рычаг 16 в обратную сторону. При этом двуплечий рычаг 12 перемещает ППМ 4. Стопорные выступы .1 и ответные впадины 3 выходят из зацепления, а ППМ 4 входит в зацепление своими кулачками с кулачками шестерни 6. Одновременно ППМ 11 выходит из зацепления с шестерней 13. В результате замыкается кинематическая цепь МП и размыкается цепь MX. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ ГАЗО-, НЕФТЕ- И ПРОДУКТОПРОВОДОВ, МЕХАНИЗМ АВТОМАТИЧЕСКОГО ОТКЛЮЧЕНИЯ ШТУРВАЛА РУЧНОГО ДУБЛЕРА | 2007 |
|
RU2334132C1 |
| Мотор-колесо транспортного средства | 1987 |
|
SU1497071A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| Мотор-колесо | 1991 |
|
SU1772004A1 |
| Многошпиндельный гайковерт | 1982 |
|
SU1069985A1 |
| УСТРОЙСТВО ДЛЯ СТОПОРЕНИЯ | 2003 |
|
RU2235958C1 |
| ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ ОТ ЭЛЕКТРОДВИГАТЕЛЯ И ВРУЧНУЮ | 2007 |
|
RU2332607C1 |
| Роторный автомат | 1989 |
|
SU1691065A1 |
| Устройство для получения замкнутых прямоугольных контуров | 1980 |
|
SU870009A1 |
| Устройство для резки глиняного бруса | 1980 |
|
SU903121A1 |
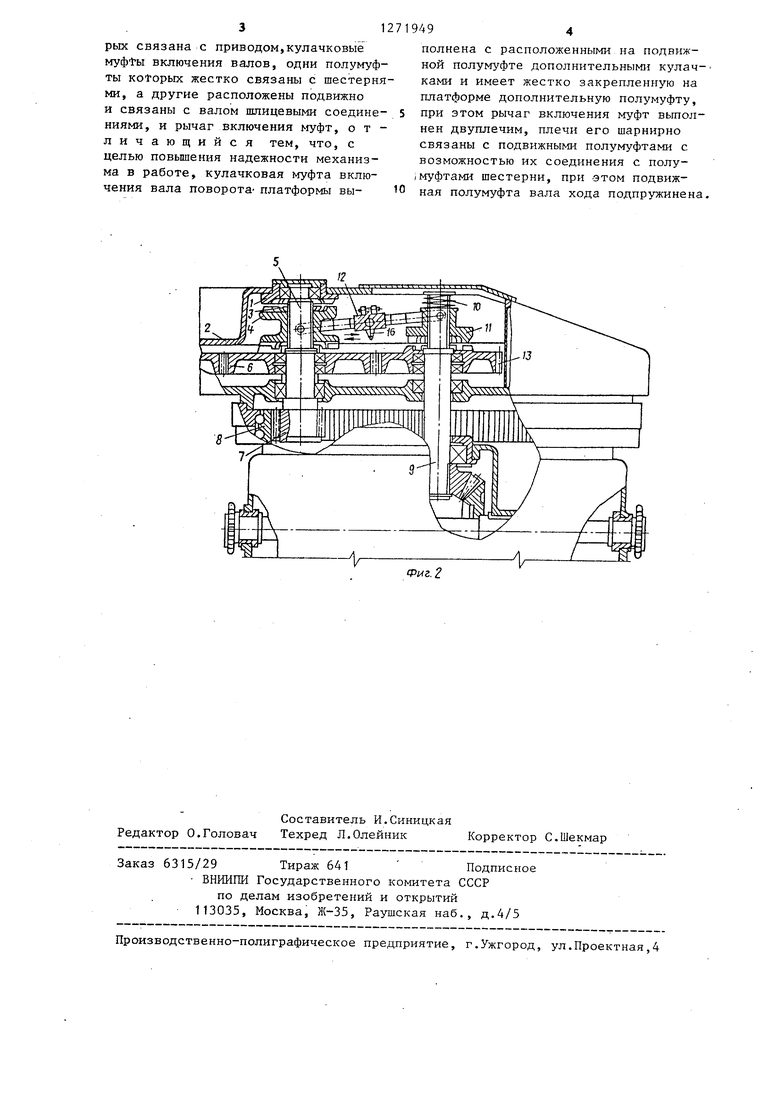
Изобретение относится к землеройным машинам, а именно к экскаваторам с поворотной нлатформой. Цельповышение надежности в работе механизма хода (MX) с валом 9 и механизма поворота (МП) с валом 5. Для этого на кулачковой полумуфте (ППМ), жестко закрепленной на поворотной платформе 2, и на подвижной ППМ 4 включения МП выполнены стопорные выступы 1 и ответные впадины 3 соответственно. Двуплечий рычаг 12 включения -МП и MX шарнирами 14 и 15 соединен с ППМ 4 и ППМ 11 включения ИХ, 10 15 mag. ю -ч1 со со
Изобретение относится к землеройным мащинам, а конкретнее к экскаваторам с поворотной платформой, Цель изобретения - повышение надежности поворотной платформы при движении экскаватора. На фиг о 1 изображена кинематическая схема механизма; на фиг. 2 -- при мер исполнения механизма. Стопорные выступы (кулачковая полумуфта) 1 выполнены на корпусе пово1Ьотной платформы 2. Ответные впадины 3 выполнены на подвижной кулачковой полумуфте 4. включения поворотного механизма, и установленной посредством шлицевого соединения на вал поворотного механизма 5, на который установлены шестерня 6 и ведущая шестерня 7, входящие в зацепление с зубчатым венцом 8.. На валу ходового механизма 9 установлены пружины 10 и посредством шлицевого соединения подвижная кулач ковая полумуфта включения ходового механизма 11, которая перемещается по валу ходового механизма 9 посредством двуплечего рычага 12 управления, замыкаясь с кулачковой полуггуфтой щестерни 13, зацепляющейся с шестерней 6. 1Честерни 6 и 13 свободно установлены на своих валах 5 и 9 и постоянно вращаются от силовой установки. Двуплечий рычаг 12 управления имеет концевые шарниры 14 и 15 и расположен на одной оси с рычагом 16, который приводится в действие от силового механизма. Механизм хода и поворота платформы экскаватора работает следующим образом. Для включения механизма хода рычагами 16 и 12 перемещают полумуфту 11 и соединяют с кулачковой полумуфтой шестерни 13. Одновременно кулачковая полумуфта 4 включения поворотного механизма соединяется с кулачковой полумуфтой 1 поворотной платформы 2, исключается вращение вала 5. При этом полумуфта 4 поворотного механизма и жестерня 6 размыкаются. При длительной остановке экскаватора стопорение поворотной платформы обеспечивается автоматически посредством пружины 10. Для обеспечения вращения платформы подвижную полумуфту 3 выводят из зацепления с полумуфтой 1, а полумуфта 4 поворотного механизма вводится в зацепление с полумуфтой шестерни 6. Одновременно подвижная полумуфта 11 ходового механизма выходит из зацепления сполумуфтой шестерни 13. В результате замыкается кинематическая цепь поворотного механизма и размыкается цепь ходового механизма. Формула изобретения Механизм хода и поворота платформы экскаватора, включающий валы поворота платформьз и хода, свободно установленные на валах и соединенные между собой щестерни, одна из которых связана с приводом,кулачковые мyфtы включения валов, одни полуьгуфты которых жестко связаны с шестернями, а другие расположены подвижно и связаны с валом пшицевыми соединениями, и рычаг включения гуфт, отличающийся тем, что, с целью повышения надежности механизма в работе, кулачковая муфта включения вала поворота- платформы выполнена с расположенными на подвижной полумуфте дополнительными кулачками и имеет жестко закрепленную на платформе дополнительную полумуфту, при этом рычаг включения муфт выполнен двуплечим, плечи его шарнирно связаны с подвижными полумуфтами с возможностью их соединения с полуiмуфтами шестерни, при -этом подвижная полумуфта вала хода подпружинена
| УСТРОЙСТВО для ТОРМОЖЕНИЯ ПОВОРОТНОЙ ПЛАТФОРМЫ ЭКСКАВАТОРОВ или КРАНОВ | 0 |
|
SU291008A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Егурнов Г.П, и др | |||
| Одноковшовые экскаваторы | |||
| -М.: Недра, 1965, с.60, рис.37 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ,0 | |||
