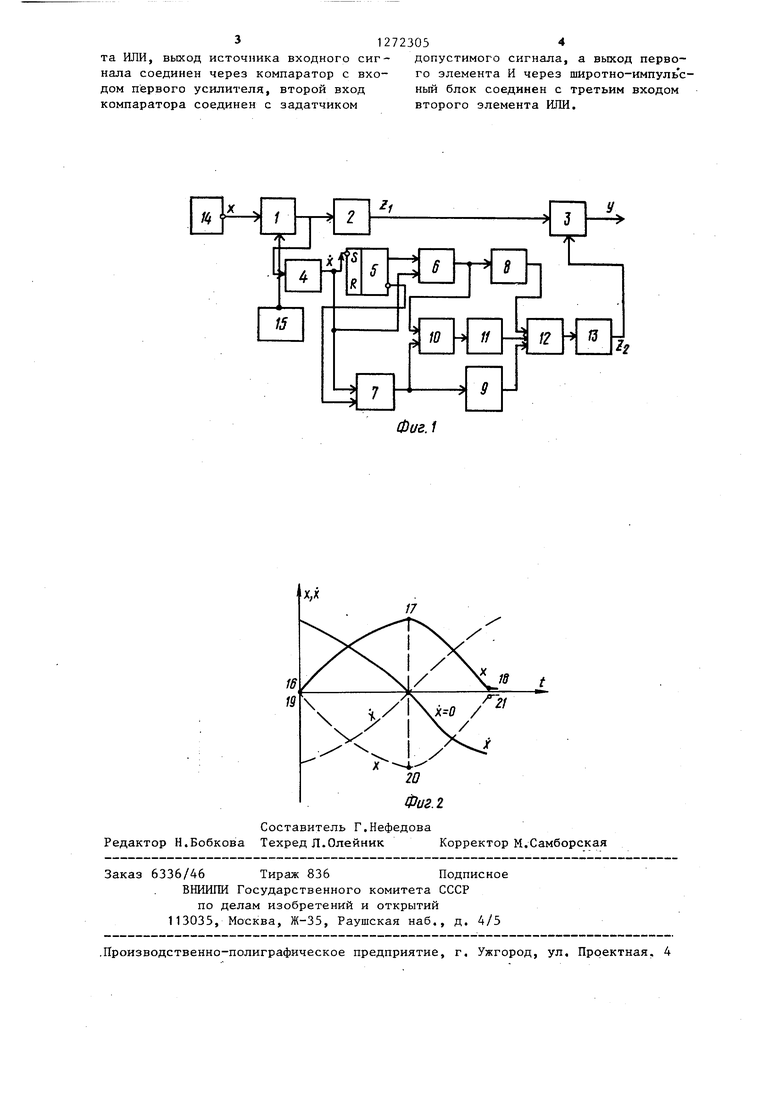
Изобретение относится к системам автоматического управления с переменной структурой. Цель изобретения - повышение точности устройства. На фиг. 1 приведена функциональ,ная схема нелинейного корректирующег устройства; на фиг. 2 - кривые, иллюстрирующие изменение входного сигнала X (ошибки) и его производной X при непрерывной коррекции (сплошная линия) и при дискретной коррекции (пунктирная линия). Устройство содержит компаратор 1 первый усилитель 2, сумматор 3, дифференциатор 4, триггер 5, первый 6 и второй 7 элементы И, широтно-импульсный блок 8, релейный элемент 9 первый элемент ИЛИ 10, определитель 11 знака, второй элемент ИЛИ 12, вто рой усилитель 13, источник 14 входного сигнала и задатчик 15 допустимого сигнала. Широтно-импульсный блок 8 предназ начен для преобразования сигнала на его входе в широтно-импульсный сигнал . Задатчик 15 допустимого сигнала формирует модуль допустимого значения сигнала X, а именно ( ) . Устройство работает следующим образом, В исходном состоянии триггер 5 на ходится внулевом положении. Если ошибка 1X1 IXgon/ , то компаратор 1 закрыт и выходной сигнал V 0. В случае XI IXgr, j компаратор 1 открывается, на выходе первого усилителя 2Z kX. При росте ошибки X по абсолютной величине производная |Х) уменьшается, триггер 5 находится в нулевом положении, выход дифференциатора 4 через второй элемент И 7 подключен к входу релейного элемента 9 и к определителю 11 знака производной. На выходе второго усилителя 13 сигнал Z, UsignX. Выходной сигнал Y устройства равен У kX + + U signX. В момент времени X О срабатывает триггер 5 и выход дифференциатора 4 через первый элемент И 6 подклю чается к входу широтно-импульсного блока 8, выход которого через первый элемент ИЛИ 10 подключается к входу определителя 11 знака производной, выход последнего через второй элемент ИЛИ 12 подключается к входу вто рого усилителя 13. Выходной сигнал устройства равен У kX-UsignXtn. Получаемые таким образом сигналы предназначены для того, чтобы выходную координату системы приблизить к требуемой, а ошибку X свести к нулю. Устройство может быть реализовано на микросхемах базовых серий. Введение непрерывной коррекгщи по ошибке X и ее скорости X изменения на участке роста ошибки 1Х (участок 16-17, 19-20, фиг. 2) позволяет быстрее достичь точки , т.е. быстрее затормозить рост ошибки 1x1. Дискретная коррекция на участке X О (участок 17-18, 20-21, фиг. 2) позволяет ликвидировать зону застоя, определяемую величиной управления +U, -Ul релейного элемента 9 и не ухудшить динамическую точность, что достигается применением дополнительного управляющего сигнала по скорости изменения ошибки в виде последовательности широтно-модулированных импульсов. В случае X ; О дискретная коррекция производится на участке X 0. Формула изобретения Нелинейное корректирующее устройство, соде|)жащее источник входного сигнала, дифференциатор, релейный элемент и последовательно соединенные первьш усилитель к сумматор, выход которого является выходом устройства, а выходы первого усилителя и дифференциатора объединены, отличающееся тем, что, с целью повьшения точности устройства, в него дополнительно введе.ны задатчик допустимого сигнала, компаратор, широтно-импульсный блик, второй элемент И, а также последовательно соединенные триггеры, первый элемент И, первьш элемент ИЛИ, определитель знака, второй элемент ИЛИ, и второй усилитель, выход которого соединен с вторым входом сумматора, выход дифференциатора соединен с входом второго элемента И с вторым входом первого элемента И и с входом триггера, инверсньй вход которого через последовательно соединенные второй элемент И и релейный элемент соединен с вторы м входом второго элемента ИЛИ, выход второго элемента И соединен с вторымвходом первого элемента ИЛИ, выход источника входного сигнала соединен через компаратор с входом первого усилителя, второй вход компаратора соединен с задатчиком
допустимого сигнала, а выход первого элемента И через широтно-импульсный блок соединен с третьим входом второго элемента ИЛИ,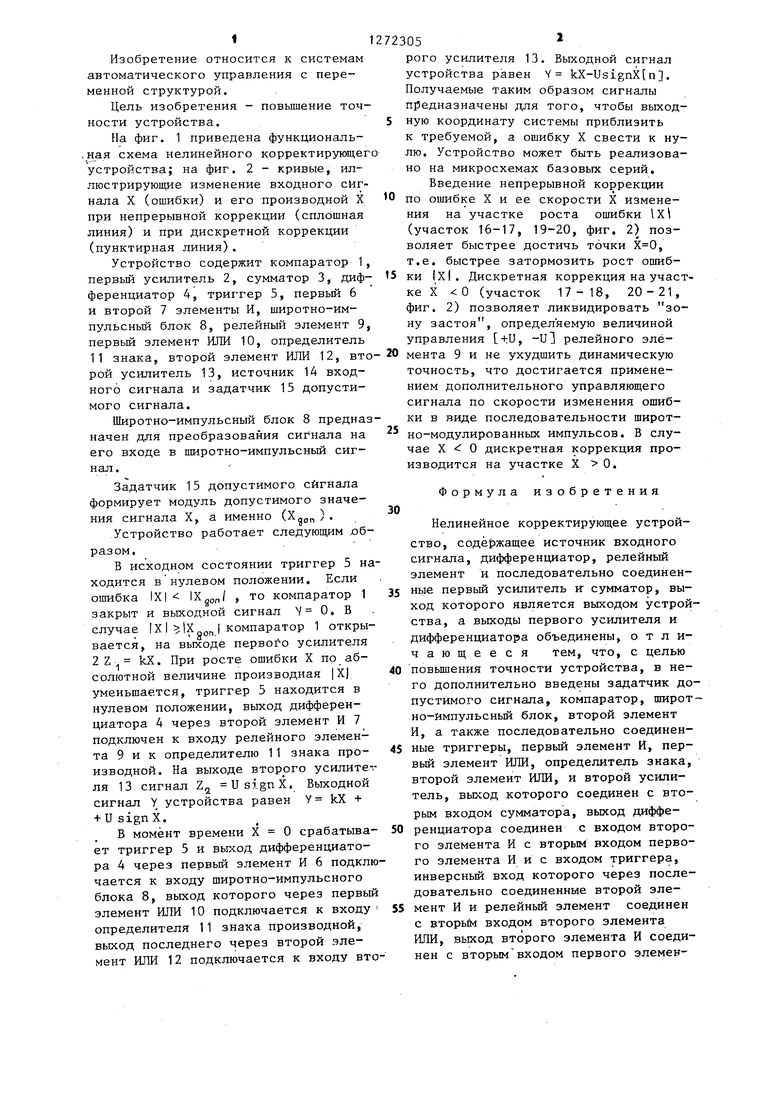
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЗОННЫЙ ЧАСТОТНО-ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2009 |
|
RU2408969C1 |
| Устройство для регулирования натяжения нитей на сновальной машине | 1984 |
|
SU1221260A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2010 |
|
RU2430392C1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| Регулятор | 1979 |
|
SU830299A1 |
| Электропривод постоянного тока | 1990 |
|
SU1767680A1 |
| Система автоматического регулирования | 1981 |
|
SU1029135A1 |
| Устройство для автоматического управления инерционными объектами при ограничении управляющего воздействия | 1979 |
|
SU864245A2 |
| АДАПТИВНОЕ ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2012 |
|
RU2513024C2 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
Изобретение относится к системам автоматического управления с переменной структурой. Целью изобретения является повьшение точности системы автоматического управления, в которой применено данное корректирующее устройство. Устройство содержит компаратор, первый усилитель, сумматор, дифференциатор, триггер, первый и второй элементы И, широтноимпульсный блок, релейный элемент, первый элемент ИЛИ, определитель знака, второй элемент ИЛИ, второй усилитель, источник входного сигнала и задатчик допустимого сигнала. Положительный эффект предлагаемого устройства, заключаюпщйся в повьшении точности системы автоматического управления, определяется комбинированием участков дискретной и непрерывной коррекции по каналу скорости изс i менения ошибки САУ при сохранении заданной динамической точности. 2 ил. (Л
«j
| Нелинейное корректирующее устройство для систем автоматического управления | 1978 |
|
SU752219A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство нелинейной коррекции | 1981 |
|
SU1012192A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
