Изобретение относится к маШйност()р(й- нию, а именно к манипуляторам для выпОЛ - нения подъемно-транспортных операций.
Известно исполнительнре устройство манипулятора, содержащее входной и вы-, ходной шарнирные параллелограммы; свя- занные между собой зубчатым механизмом один из элементов которого связан с входным параллелограммом, а другой -с выходным (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987,
с. 213, схема а)- ... / .:: Л.-:Ч -::- ;/-
Известно исполнительное устройство манипулятора, содержа щее звен ья, соединенные в виде шарнирного параллелограмма, причем входная пара звеньев связана с основанием и приводом, а выходная - с захватом. Между собой эти пары звеньев связаны механизмом шарнирного соединения HIОднако такое устройство имеет недостаточную кинематическую жесткость в связи с наличием зазоров в каждой паре зубчатых колес. Указанный недостаток приводит к возникновению дополнительных вибраций.
Цель изобретения - повышение надежности за счет снижения вибраций.
С этой целью механизм шарнирного соединения выполнен в виде полого корпуса, шарнирно связанного с основными звеньями, а также дополнительных звеньев, каждое из которых шарнирно установлено на звеньях соответствующей пары, и зубчато- реечной передачи, зубчатые рейки которой смонтированы на дополнительных звеньях, а зубчатое колесо шарнирно закреплено на полом корпусе.
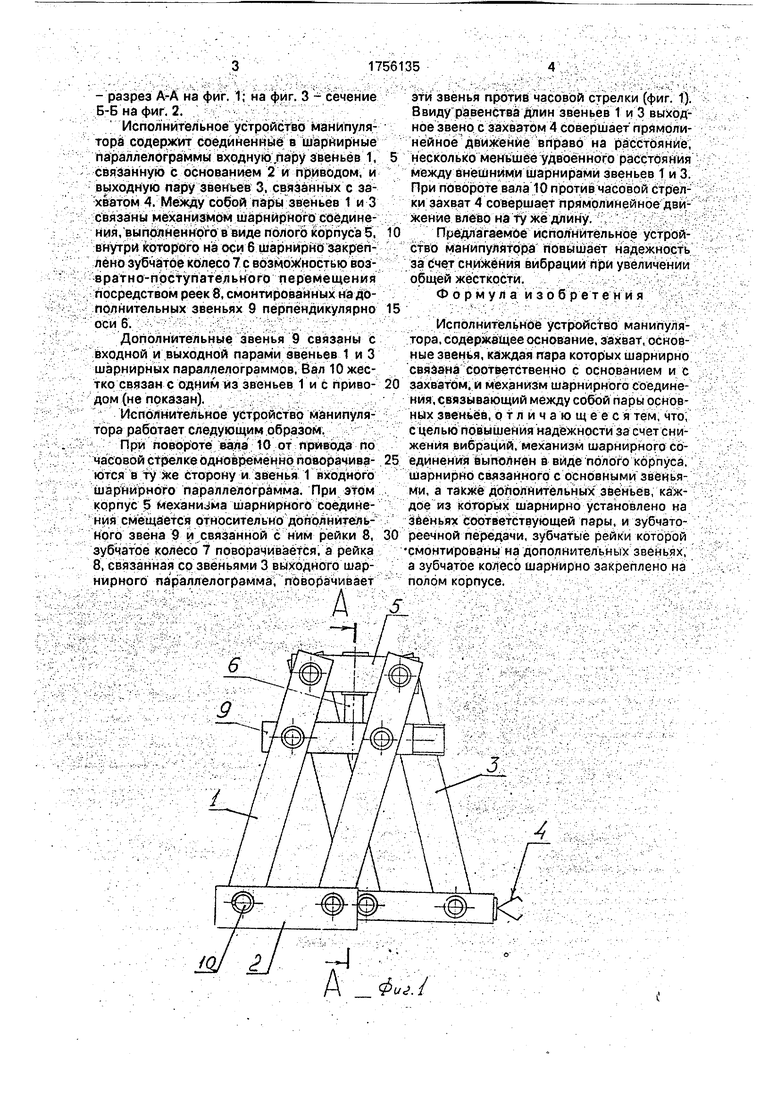
На фиг. 1 показано исполнительное устройство манипулятора, вид сбоку; на фиг. 2
1
сл
Os
СЛ
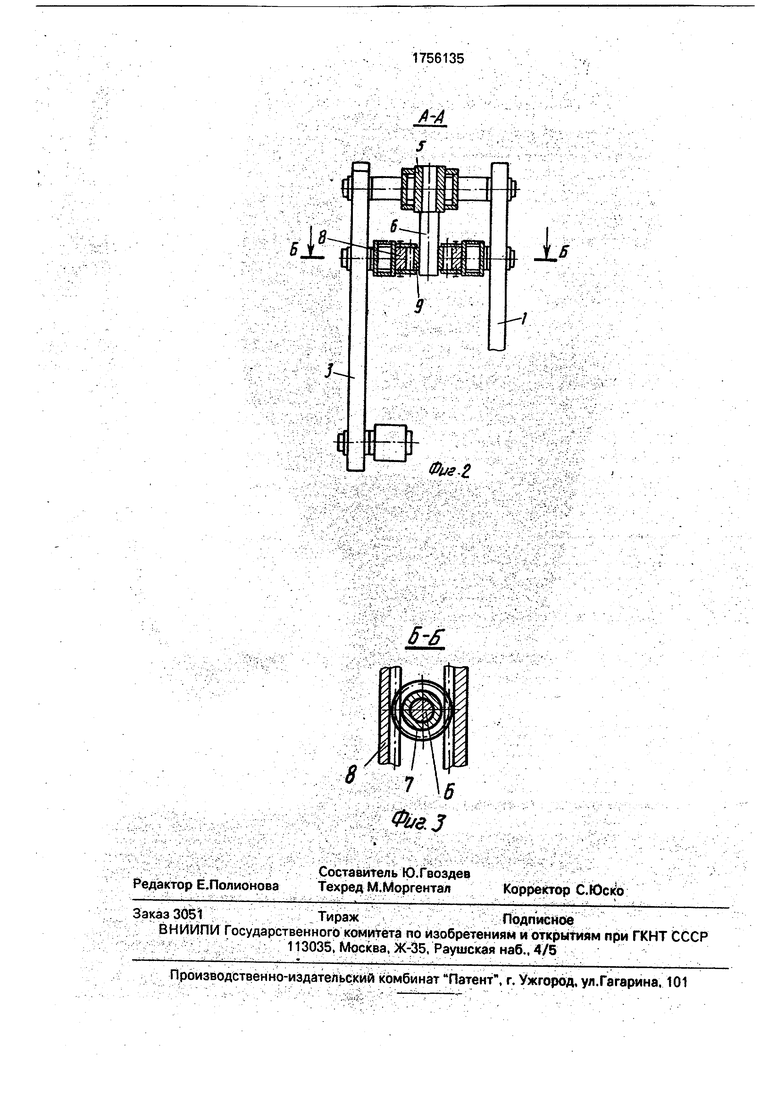
- разрез А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2.
Исполнительное устройство манипулятора содержит соединенные в шарнирные параллелограммы входную .пару звеньев 1, связанную с основанием 2 и приводом, и выходную пару звеньев 3, связанных с захватом 4. Между собой пары звеньев 1 и 3 связаны механизмом шарнирного соединения, выполненного в виде полого корпуса 5, внутри которого на оси 6 шарнирно закреплено зубчатое колесо 7 с возможностью возвратно-поступательного перемещения посредством реек 8, смонтированных на дополнительных звеньях 9 перпендикулярно оси 6.
Дополнительные звенья 9 связаны с входной и выходной парами звеньев 1 и 3 шарнирных параллелограммов, Вал 10 жестко связан с одним из звеньев 1 и с приво- дом (не показан).
Исполнительное устройство манипулятора работает следующим образом.
При повороте вала 10 от привода по часовой стрелке одновременно поаорачива- ются в ту же сторону и звенья 1 входного шарнирного параллелограмма. При этом корпус 5 механизма шарнирного соединения смещается относительно дополнительного звена 9 и связанной с ним рейки 8, зубчатое колесо 7 поворачивается, а рейка 8, связанная со звеньями 3 выходного шарнирного параллелограмма, поворачивает
эти звенья против часовой стрелки (фиг. 1). Ввиду равенства длин звеньев 1 и 3 выходное звено с захватом 4 совершает прямолинейное движение вправо на расстояние, несколько меньшее удвоенного расстояния между внешними шарнирами звеньев 1 и 3. При повороте вала 10 против часовой стрелки захват 4 совершает прямолинейное движение влево на ту же длину.
Предлагаемое исполнительное устройство манипулятора повышает надежность за Счет снижения вибрации при увеличении общей жесткости.
Формула изобретения
Исполнительное устройство манипулятора, содержащее основание, захват, основные звенья, каждая пара которых шарнирно связана соответственно с основанием и с захватом, и механизм шарнирного соединения, связывающий между собой пары основных звеньев, отличающееся тем, что, с целью повышения надежности за счет снижения вибраций, механизм шарнирного соединения выполнен в виде полого корпуса, шарнирно связанного с основными звеньями, а также дополнительных звеньев, каждое из которых шарнирно установлено на звеньях соответствующей пары, и зубчато- реечной передачи, зубчатые рейки которой смонтированы на дополнительных звеньях, а зубчатое колесо шарнирно закреплено на полом корпусе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительное устройство манипулятора | 1985 |
|
SU1274919A1 |
| Исполнительное устройство манипулятора | 1986 |
|
SU1366383A2 |
| Манипулятор | 1985 |
|
SU1269994A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Исполнительный орган манипулятора | 1987 |
|
SU1426777A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2247021C1 |
| Манипулятор | 1985 |
|
SU1323366A1 |
| Автоматический манипулятор | 1980 |
|
SU944918A1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
Использование: автоматизация подъемно-транспортных операций. Сущность изобретения: исполнительное устройство манипулятора содержит две пары основных звеньев 1 и 3, каждая из которых шарнирно связана соответственно соснованием и с захватом, а также с полым корпусом 5 механизма шарнирного соединения. С целью уменьшения вибраций механизм шарнирного соединения включает два дополнительных звена 9, связывающих между собой основные звенья 1 и 3 каждой пары и зубчато-реечную передачу, рейки 8 которой смонтированы на дополнительных звеньях 9, а зубчатое колесо 7 установлено на оси 6, размещенной в полом корпусе 5. 3 ил.
4
Фиг-Z
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА |
