I1
Изобретение отчюсится к автоматике и может быть использовано при управлении электроприводом в робототех- нических системах, не допусканлцих перерегулирований и требующих высоко- го быстродействия.
Цель изобретения - повышение быстродействия и точности управления.
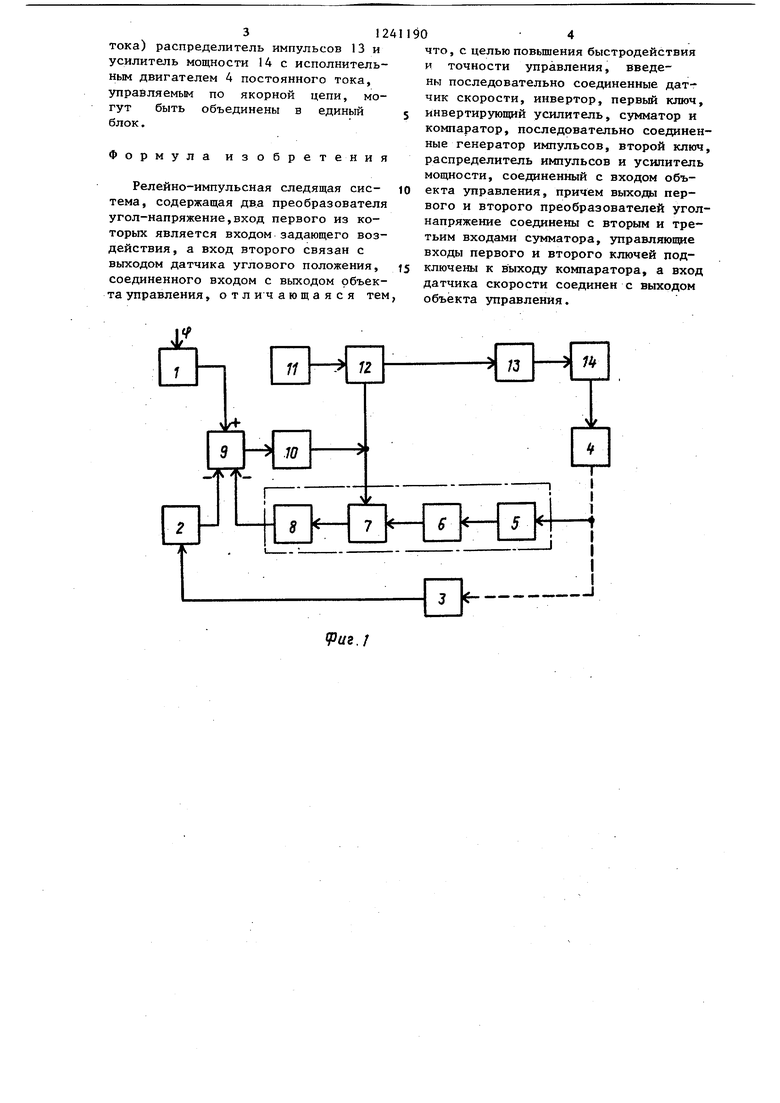
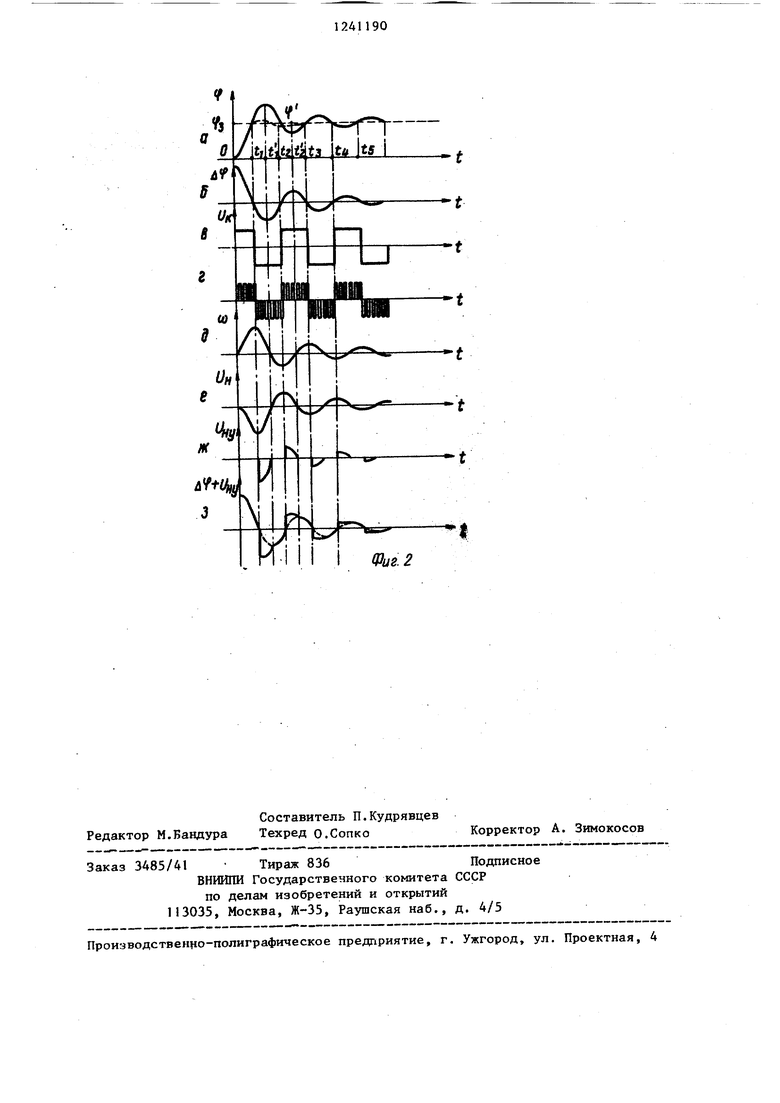
На фиг. 1 представлена функциональная схема следящей системы; на фиг, 2 - временные диаграммы, поясня- -принцип действия системы при постоянном значении задающего воздействия.
Следящая система состоит из перво- го и второго преобразователей угол- напряжение 1 и 2, датчика 3 углового положения, объекта управления 4, представляющего собой исполнительный двигатель постоянного тока или щаго- вый двигатель, датчика 5 скорости, инвертора 6, первого ключа 7, инвертирующего усилителя 8, сумматора 9, компаратора 10, генератора импульсов П., второго ключа 12, разделителя импуль- сов 13 и усилителя мощности 14.
Устройство работает следующим образом.
В период разгона исполнительного устройства до уровня Рз(интервал вре мени 0-t ), угловая скорость со вращения двигателя 4 имеет положительное значение (см. фиг, 2) и отрицательная обратная связь по скорости должна быть отключена, чтобы не препят- ствовать разгону с максимально возможным нарастанием скорости. Это требование выполняется введением в схему ключа 7, который находится на интервале времени 0-tj, в разомкнутом состоянии под действием отрицательного напряжения инвертора Uu и положительного напряжения U компаратора. В момент времени t необходимо обеспечить препятствие дальнейшему воз- растанию управляемой координаты М , превышающей заданный уровень J. Это достигается замыканием ключа 7 в момент времени t под действием отрицательного уровня напряжения Ut компа- ратора, поскольку на второй вход ключа продолжает подаваться отрицательное значение напряжения V с выхода инвертора 6.
Так как ключ выполнен на опера- ционном усилителе, инвертирующем знак входного сигнала, то для создания в интервале t -t глубокой отрицатель902
ной обратной связи по скорости используется инв ертирующий усилитель 8, обеспечивающий знак сигнала скоростной обратной связи, противоположный знаку входного задающего воздействия.
Итак, в начале переходного процесса при больших отклонениях системы от установившегося состояния (интервал времени O-t) коэффициент демфирования мал. В момент достижения выходной величиной заданного значения коэффициет демпфирования возрастает скачком, и перерегулирование исключается.
Таким образом, на выходе инвертирующего усилителя 8 формируется сигнал Uuy, который, суммируясь, с сигналом ошибки рассогласования Ф , изменяет характер протекания переходного процесса системы в интервалы времени , tj-Ц , tg.-tg и. т.д. в сторону значительного уменьшения выбросов над линией установившегося значения, а в интервале времени tj.- tj , и т.д. в сторону снижения отклонения регулируемой координаты под линией устано.вившегося значения (пунктирная кривая на фиг. 2(3).
С целью улучшения энергетических показателей процесса управления исполнительным механизмом, а также повышения помехоустойчивости системы применено импульсное управление, которое обеспечивается благодаря вве дению в структуру генератора 11 разнопол ярных прямоугольных импульсов, подаваемых на ключ 12, аналогичный ключу 7, и заполняющих пачками прямоугольные импульсы U|(, поступающие на второй вход ключа 12. Таким образом, с выхода ключа 12 на распределитель импульсов 13, осуществляющий поочередное подключение соответствующих обмоток шагового исполнительного механизма, поступают пачки им- пульсов (фиг. 2z) положительной, и отрицательной полярности, вызывая соответственно прямой ход или реверс исполнительного устройства 4.
Усилитель мощности 14 предназначен для обеспечения требуемого уровня мощности импульсной последовательности, достаточной для приведения в движение исполнительного механизма.
В случае импульсного управления исполнительным механизмом непрерывного типа (двигателем постоянного
тока) распределитель импульсов 13 и усилитель мощности 14 с исполнительным двигателем 4 постоянного тока, управляемым по якорной цепи, могут быть объединены в единый блок,
Формула изобрет е н и я
Релейно-импульсная следящая сие- тема, содержащая два преобразователя угол-напряжение,вход первого из которых является входом задающего воздействия, а вход второго связан с выходом датчика углового положения, соединенного входом с выходом объекта управления , отличающаяся тем
9аг./
что, с целью повьшения быстродействия и точности управления, введены последовательно соединенные датчик скорости, инвертор, первый ключ, инвертирующий усилитель, сумматор и компаратор, последовательно соединенные генератор импульсов, второй ключ, распределитель импульсов и усипитель мощности, соединенный с входом объекта управления, причем выходы первого и второго преобразователей угол- напряжение соединены с вторым и третьим входами сумматора, управляющие входы первого и второго ключей подключены к выходу компаратора, а вход датчика скорости соединен с выходом объекта управления.
t
Vj
у
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1989 |
|
SU1732329A1 |
| Импульсный регулятор | 1988 |
|
SU1594485A1 |
| Следящая система | 1984 |
|
SU1216773A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2091979C1 |
| Электропривод | 1988 |
|
SU1656652A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Устройство для управления скоростью вращения электродвигателя постоянного тока | 1985 |
|
SU1564590A1 |
| Устройство программного управления металлорежущими станками | 1985 |
|
SU1259215A1 |
| Регулирующее устройство | 1985 |
|
SU1267354A1 |
| Устройство для управления ромбическим манипулятором | 1983 |
|
SU1315933A1 |
Изобретение относится к автоматике и может быть использовано при управлении электроприводом. Цель, изобретения - повышение быстродействия и точности управления. Указанная цель достигается тем, что в систему введены нелинейное корректирующее устройство, содержащее последовательно соединенные датчик скорости, инвертор, ключ и инвертирующий усилитель, соединенный своим выходом с одним из входов сумматора. Система содержит также два преобразователя угол- напряжение, компаратор, второй ключ и генератор импульсов. В качестве объекта управления используется либо электродвигатель постоянного тока,либо шаговый двигатель. 2 ил. ю 
Составитель П.Кудрявцев Редактор М.Бандура Техред о.СопкоКорректор А. Зимокосов
Заказ 3485/41 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Следящая система | 1981 |
|
SU962847A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Импульсная следящая система | 1975 |
|
SU553592A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
