Известны погрузочно-разгрузочные устройства для грузовых автомашик, выполненные в виде качающегося, с подзешегшой крюкозо; ; обоймой, портала, .шарнирно прккреплешюго к размещенным в кузова стойкам, несущим блоки для подъе.:а каната и размещенным на высоте, обеспечивающей, прилгерно, горизонтальное перемещение груза при изменении вылета портала.
Особенность описываемого устройства заключается в том, что для обеспечения возможности перемещения портала пoдъe rиым канатом применено размещенное яа портале стопорное управляемое рхкояткой приспособление, произвольно защемляющее подъе: гны1 1 ка;;ат. Прл этом стопорное приспособление выполнено в виде и.юских oxsaтывающих канат сжимов с фигурными цапфами, которьге управляются рукояткой с помощью ф {гурных поводков.
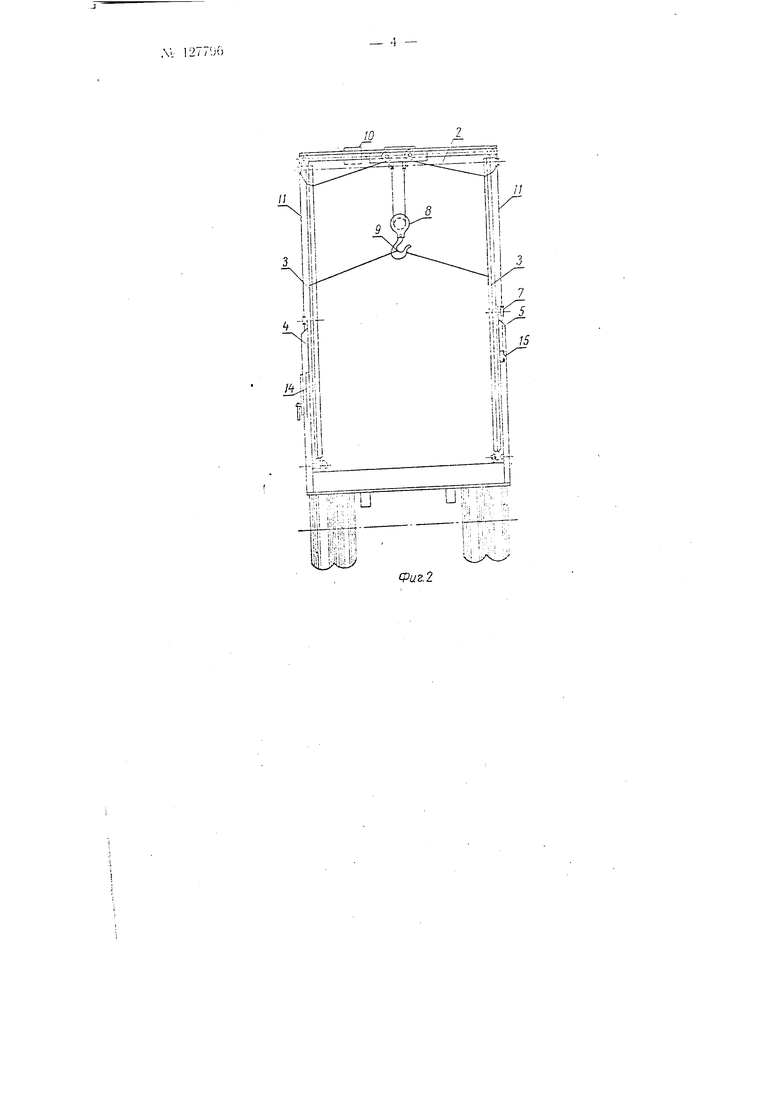
На фиг. I изображено описываемое устройство, вид сбоку; па фиг. 2-то же, вид сзади; на фиг. 3-схема тормоз1 ого .механизма погрузочно-разгрузочного устро&ства; на фиг. 4-стопорное приспособление устройства.
Устро; |ство представляет собой качающийся портал J, состоящи: из траверсы 2, двух щарнирно укрепленных стоек 3 и двух неподвижных стоек 4 н 5. Стойки 3, 4 vi 5 установлены в конце кузова авто.гащ;п1ы. Ыа траверсе смонтированы направляющие 6 и отводяш.ие блоки ()олики) 7, полиспастовый блок 8 с грузовым крюком 9 ;i тормозной механиз.м 10 для рабочего троса //.
На фиг- 1 пунктиром показано: 12-положение портала во время подъема л опускания груза, 13-его транспортное положе/пге.
jlctiasi, no ходу аатомаипи- ы, опорная стойка 4 несет пару отвсдя1ЦИХ б.моко.ч 7 и нрпводной механизм (рычажную лебедку) 14. Прав;1 стойла 5 несет юже пару отводящих блоков 7 и 5, зак)сп.1я:о;иую конец |)абочего троса. РабочнГ трос 11, нроходянип от блока 7 через отвод5пц; с и направляющие блоки, опорные стойки, портал н блок 8, вторым коицс.м закреплен ил лебедке, посредством которо; осуществляется нодъсл; л оп}сканнс груза, подъем л опускап1;е порта.ча как с , так и без груза.
Тормозно ме.хаиизм Ю имеет рычаг /6 управления, KOTCpF i; i. H;IXOдясь в положении Л (фиг. 3), фиксирхт-т механиз, в иерабочсм г ь;ключенном состоя П1н и удерживается в JTOM по.южении нр жииоГ1 17, которая одним концо.г закрег1ле1;а за рычаг 16, а вторым за траверсу 2 портала /. В положсили В (на фнг. 3 обозначено нунктиром). когда рыч;;г 16 повернется влево, иксирустся включенное cocTosniiic механизма, рабочий трос //-заторможен. В положение В рычаг 16 переводится уснли.ем рабочего путем натяпшания тросика 18, закрепленного за конец рычага 16 н выведенного через )1анравляющи1 блок 19 к 1кп:ке-рычагу 20, укрепленной в нижнем конце левой стойки .) портала.
В корпусе тормозного мexaннз a размен1,е1;ы: два 21 с сегментными цапфами 22 (по две с каждой стороны), .которые сжимают трос // во время торможения; два пластинчатых поводка 23 и две пластинчатые серьги 24 с фигурными вырезами, в которые входят сегментiHiie щшфы 22. Серьгн и поводки насажены попарно на оси 25 и могут качаться в продольном направлении в пределах угла, допускаемого фигурными вырезами. Ось 26 верхних проушин поводков 23 входит в продолговатую прорезь внутреннего рычага 27 тормозного механизма, закрепленного неподвижно на оси 28, на которой также 1 елодвижно закреплен рычаг 16 управления. Ось 2-S свободно впан1ается в двух подшипниках в верхней части корпуса тормозного механ;;зма.
При нахождении рычага 16 управления тормозного NrexaHii3Ma з положении А сжимы 21 находятся в предельно развернутом состоянии, тормозной механизм выключен, рабочий трос свободно проходг т между полукруглыми цапфами 22. Когда рычаги 16 переводят влево, и положение Л, фигурными вырезами поводков 23 серег 24, действующими на сегментные цап(Ьы 22, сжимы сближаются, происходит захват рабочего троса. В этот момент рабочий трос 11 полностью затормажнпастся. перестает работать на подъем груза и начннает вместе с грузом поднимать портал в вертикальное положение при работе лебедки 14 на подъем НЛП опускать портал с грузом из вертикального в наклощ-ое при работе лебедки на опускание.
Кренежное устройство рычага 16 в двух рабочих положен1-:ях. соответствующих положению Л и В, представляет собой рамку-рычаг 20, один конец которой соединен с тросиком 18, а другой вращается в подшипниках 29. Включение или выключение тормоз :ого устройства производят поворотом рукояти 30 на 180°.
Предмет изобретения
1. Погрузочно-разгрузочное устройство для грузовых автомашин, выполненное в виде а :ачающегося, с подвешенной крюковой обоймой, портала, шарнирно прикрепленного к размещенным в конце кузова стойкам, несушим блоки для подъемного каната к размещенным на высоте, обеспечивающей, примерно, горизонтальное перемещение груза лри изменении вылета портала, о т л и чающееся тем, что, с целью обеспечения возможности перемещения портала подъемным канатом, прнмепено |)a;iMein.eiiiioe на портале стопориос у.пра. яемос рукояткой rii); способлеп.чс, произвольно занюмляюнее по;п емны| 1 канат.
2- Форма выполнения устройства по п. 1, о т л и ч п ю 1.ч а 5; с я тем, что стопорное приспособление вь пол :Сно в BUjte дзух плоских охвать:зающих канат сжимов, снабженных фигурными цаноами. охваче1 ньп И при:оелиненными к рукоятке фигурными поЕОДкам ;, при повороте сближающими сжимы.




( j7
n2ii
-,-- /оСч 7 -.
( о )
11
26
