роцилиндра 22. При этом ролик 16 идет вперед и упирается в резьбу контролируемой шпильки. Если ролик 16 своей резьбой попадает в резьбу шпильки, каретка 14 занимает крайнее левое положение. При этом на 1/7 часть окружности поворачиваются диски 4, 5, 6. В гнездо 33 попа дает следующая деталь. По заполнению всех шести гнезд 33 диска 5 по
1
Изобретение относится к автоматизации сборочных процессов, а именно к автоматическим линиям для сборки ступицы колеса с тормозным барабаном, и может применяться в авто- и тракторостроении.
Целью изобретения является повышение производительности за счет обеспечения набора комплекта из шести шпилек и их одновременной подачи на сборк-у.
На фиг. 1 изображено загрузочное устройство, общий вид, разрез , на фиг . 2 - вид А на фиг , 1 ; на фиг. 3 - разрез Б-Б на фиг. 1, на фиг. 4 - разрез В-В на фиг. 2, на фиг. 5 - разрез Г-Г на фиг. Г, на фиг. 6 - .разрез Д-Д на фиг. 1.
Заг рузочнре устройство состоит и основания 1, в расточке 2 которого подвиЛсно установлен вал 3. На валу 3 закреплен накопитель, вьтолнен- ный в виде дисков 4, 5, 6. В пазах 7 и 8 диска 4 установлены пружины 9 и 0, упирающиеся в пальцы 11 и 12, причем палец 11 закреплен в диске 5, а палец 12 - в диске 6.К основанию 1 закреплено неподвижное кольцо 13, расположенное концентрич но диску 6. В направляющих основани 1 установлена каретка 14, в которой на оси 15 расположен механизм ориентации, вьшолненный в виде ролика 16, удерживаемого от осевого смещения пружинами 7. В диске 5 закреплено шесть упоров 18, а в диске 6 упор 19, конец которого выведен наверх через паз в диске 5. На кронштейне 20, закрепленном на основании 1, установлен гидроцилиндр 21 выдачи неправильно ориентированных
279796
ворачивается диск 6, сжимая пальцем пружину. I Ir.cTb птилек проваливаются в отводящие лотки и поступают на сборку. Если ролик 16 своей резьбой упирается в мелкую резьбу, каретка 14 не доходит до крайнего положения и срабатывает только датчик 30. При этом поворота вала 3 не происходит. Диск 5 поворачивается, при этом шпилька из гнезда 33 отводится в бункер. 6 ил.
2
шпилек. На основании 1 также установлен гидроцилиндр 22, шток 23 которого связан с кареткой 14. На нижнем конце вала 3 закреплен фланец 24, в котором закреплено семь пальцев 25. На нижних направляющих основаниях 1 подвижно установлена каретка 26, на которой закреплен ку
лачок 27. С кареткой 26 связан шток
28 гидроцилиндра 29, смонтированного в основании 1„ В кронштейне 20 установлены датчики 30 и 31 для контроля положения каретки 14 и датчик
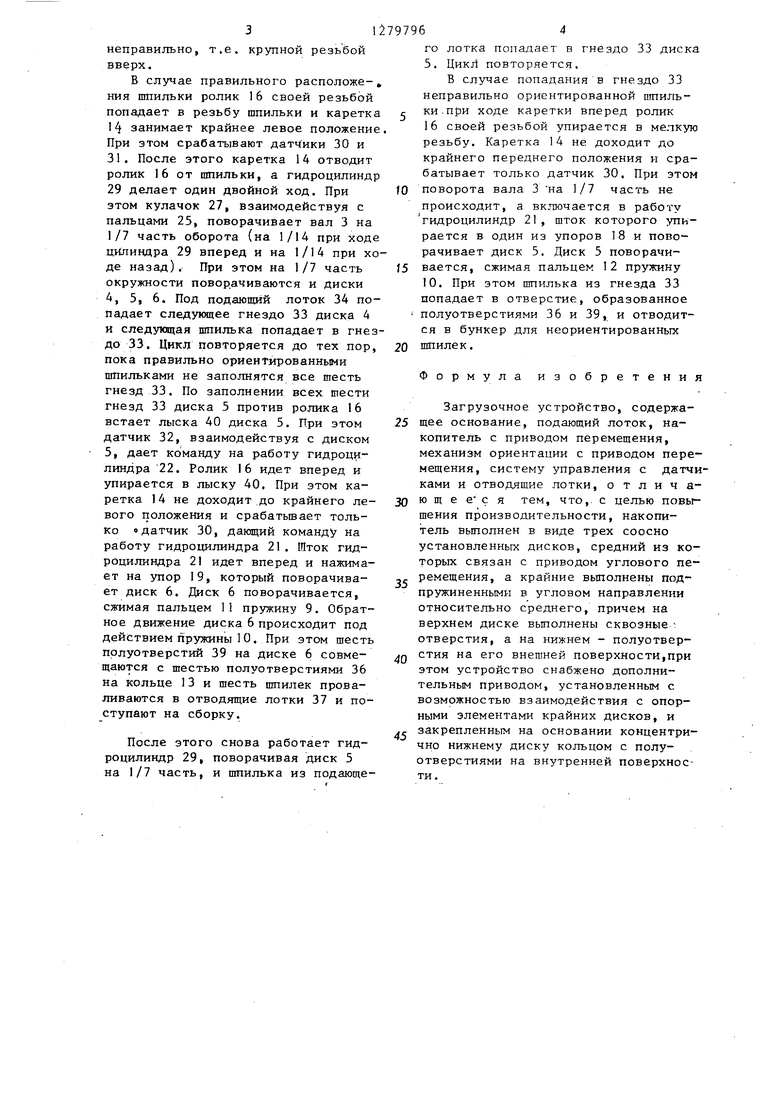
32 для контроля наличия шпильки в гнезде 33 диска J). Выше диска 5 расположен подающий лоток 34 подвода птилек. На кольце 13 имеется одно полуотверстие 35,, расположенное в месте отвода неориентированных.шпилек. Кроме того, на кольце 13 имеется шесть полуотверстий 36 в местах отвода ориентированных шпилек по отводящим лоткам 37. На диске 6 имеется шесть полуотверстий 38 для отвода неориентированных шпилек и шесть полуотверстий 39 для отвода ориентированных птилек. На диске 6 имеется лыска 40,
Загрузочное устройство работает следующим образом.
1 1пильки, подлежащие контролю, по подающему лотку 34 поступают в приемное гнездо 33 диска 5. Приход шпильки в гнездо 33 определяется
датчиком 32, который дает команду на работу гидроцилиндра 22. При этом ролик 16 идет вперед и упирается в резьбу контролируемой птильки,. Возможны два случая: шпилька рас- положена правильно, т.е. крупной резьбой вниз, и шпилька расположена
неправильно, т.е. крупной резьбой вверх.
В случае правильного расположения шпильки ролик 16 своей резьбой попадает в резьбу шпильки и каретка 14 занимает крайнее левое положение При этом срабатывают датчики 30 и 31. После этого каретка 14 отводит ролик 16 от шпильки, а гидроцилиндр 29 делает один двойной ход. При этом кулачок 27, взаимодействуя с пальцами 25, поворачивает вал 3 на 1/7 часть оборота (на 1/14 при ходе цилиндра 29 вперед и на 1/14 при ходе назад). При этом на 1/7 часть окружности поворачиваются и диски
4,5, 6. Под подающий лоток 34 попадает следующее гнездо 33 диска 4
и следующая шпилька попадает в гнездо 33. Цикл повторяется до тех пор, пока правильно ориентированными шпильками не заполнятся все шесть гнезд 33. По заполнении всех шести гнезд 33 диска 5 против ролика 16 встает лыска 40 диска 5. При этом датчик 32, взаимодействуя с диском
5,дает команду на работу гидроцилиндра 22. Ролик 16 идет вперед и упирается в лыску 40. При этом каретка 14 не доходит до крайнего левого положения и срабатьшает только «датчик 30, дающий команду на работу гидроцилиндра 21. Шток гидроцилиндра 21 идет вперед и нажимает на упор 19, который поворачивает диск 6. Диск 6 поворачивается, сжимая пальцем 11 пружину 9. Обратное движение диска 6 происходит под действием пружины 10. При этом шесть полуотверстий 39 на диске 6 совмещаются с шестью полуотверстиями 36 на кольце 13 и шесть шпилек проваливаются в отводящие лотки 37 и поступают на сборку.
После этого снова работает гидроцилиндр 29, поворачивая диск 5 на 1/7 часть, и шпилька из подающего лотка попадает в гнездо 33 диска 5. Цикл повторяется.
В случае попадания в гнездо 33 неправильно ориентированной шпиль- ки.при ходе каретки вперед ролик 16 своей резьбой упирается в мелкую резьбу. Каретка 14 не доходит до крайнего переднего положения и срабатывает только датчик 30. При этом
поворота вала 3 на 1/7 часть не происходит, а включается в работу гидроцилиндр 21, шток которого упирается в один из упоров 18 и поворачивает диск 5. Диск 5 поворачивается, сжимая пальцем 12 пружину 10. При этом шпилька из гнезда 33 попадает в отверстие, образованное полуотверстиями 36 и 39, и отводится в бункер для неориентированных
шпилек.
Формула изобретения
Загрузочное устройство, содержащее основание, подающий лоток, накопитель с приводом перемещения, механизм ориентации с приводом перемещения, систему управления с датчиками и отводящие лотки, о т л и ч аю щ е е с я тем, что,, с целью повышения производительности, накопитель выполнен в виде трех соосно установленных дисков, средний из которых связан с приводом углового перемещения, а крайние выполнены подпружиненными в угловом направлении относительно среднего, причем на верхнем диске вьшолнены сквозные отверстия, а на нижнем - полуотверстия на его внешней поверхности,при этом устройство снабжено дополнительным приводом, установленным с возможностью взаимодействия с опорными элементами крайних дисков, и
закрепленным на основании концентри- чно нижнему диску кольцом с полуотверстиями на внутренней поверхности.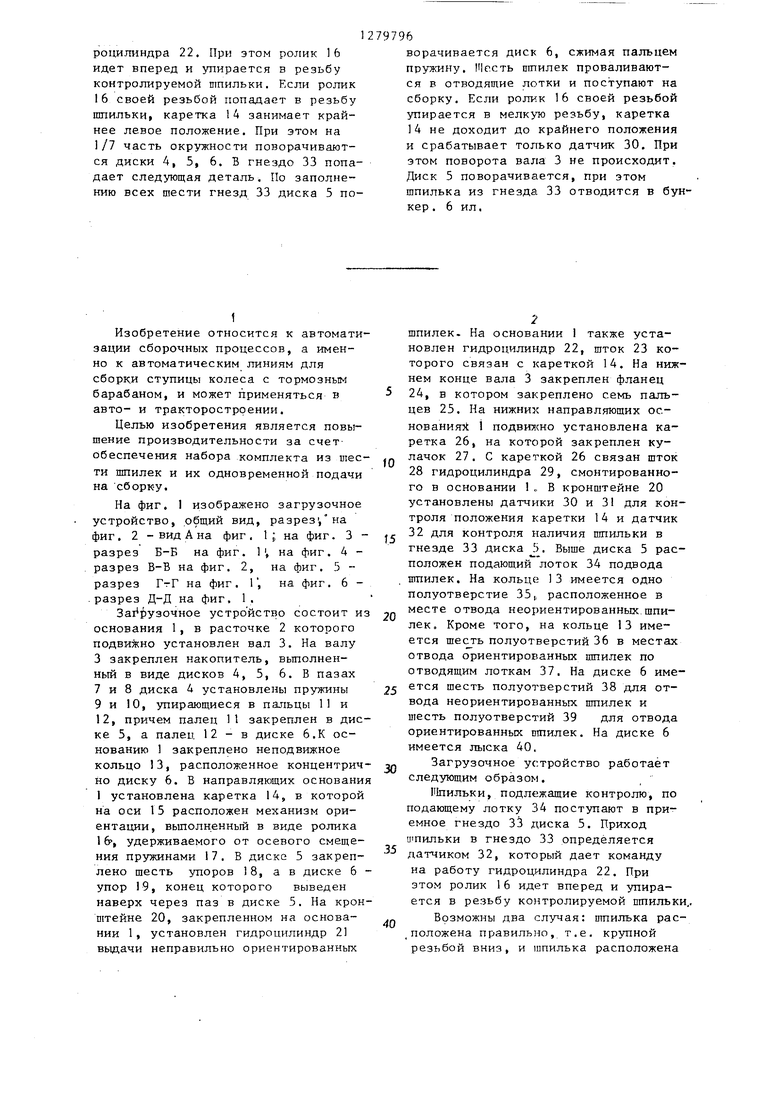
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1984 |
|
SU1500462A1 |
| Устройство для ориентации деталей | 1989 |
|
SU1710289A1 |
| Способ сборки резьбовых соединений и устройство для его осуществления | 1980 |
|
SU863301A1 |
| РЕЗЬБОНАКАТНОЙ АВТОМАТ | 1992 |
|
RU2021063C1 |
| Устройство для ориентации шпилек | 1985 |
|
SU1261768A1 |
| Загрузочное устройство | 1987 |
|
SU1484574A1 |
| Устройство для выгрузки свулканизованных покрышек | 1980 |
|
SU904250A1 |
| Сборочный участок автоматической линии | 1985 |
|
SU1283017A1 |
| Машина для формования стельки и прикрепления ее к следу колодки | 1982 |
|
SU1321359A3 |
| Устройство для ориентации резьбовых шпилек | 1989 |
|
SU1701481A1 |


Изобретение относится к автоматизации сборочных процессов, а именно к автома гическим линиям для сборки ступицы колеса с тормозным барабаном, и найдет применение в авто- и тракторостроении. Целью изобретения является повышение производительности за счет обеспечения набора комплекта из шести птилек и их одновременной подачи на сборку. Шпильки, подлежащие контролю, по подающему лотку 34 поступают в приемное гнездо 33 диска 5. Положение шпильки определяется датчиком 32, которьй дает команду на работу гид21 20,г JO J / I / / сл d 29
Б-Б
75
Фt4Z.Ц
25 21
Г- Г
Фиг. 5
д-д
39
39
39
3d
38 /3 ЗЭ
36
Фиг,6
Составитель Л.Пыжикова Редактор Н.Швыдкая Техред М.Ходанич
Заказ 7003/13 Тираж 826Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Корректор И.Эрдейи
| Автоматическая линия сборки ступицы с тормозньвч барабаном автомобиля КАМАЗ, спроектированная итальянской фирмой Морандо/ и работающая с декабря I975 г | |||
| на Камском автомобильном заводе, № 53 00.6.01 | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1920 |
|
SU273A1 |
