И 1С1бре тение ()тно(.:и гс 5 к м/ипиг v- строению, в частности к ха хчогн ее- кому (Оборудованию /UIH лггт{ матичр : кси подачи заготовок в рабочую обрабатывающей машины, например iTpecca. Целью иэобре темня является .:- шениЕ належноети работг 1 и Tfi-iiiocii: позицпоннрования путем угпхмдения R.r нeмa г чeeкoл цепк.
Не чертеже i3o6pa;K Mi;i усипемати- чеекая схема ма; иг:улято1)а
Манипулятор содержит керпус , н; котором установлен привод (Г1нигатель 2, соединенный через пере дачу. например многоручьепую neije- дачу J. с редуктором 4. (. обеих c-vir- рон редуктора ч смонтирснаигы ,1ч- кн 5 {: 6j причем ку.пачок i е и. рь чажной еиетемой с ,n ьиьм г-:,- лом 7 . iia верхнем выходно - конце пер THKaiibHoro вала / устано1: :уепа мехапи чеекая рука 8, за креплен:-: а я на нем с помощью Зс шима 9 и снаблсенная пневматическими разборными захватиым -{ органами 10. выполненными в виде, например, вакуумного захвата. Рычажная система представлена 1 взаимодействующим с кудачком Ь и inap нирно связанным с рычагом 12. и ;uiy- плечим рычагом 13, причем рычаги 1/ и 13 соединены с вертикалыгым палом соответственно жестко и шарнирно Свободньй конец рычага 13 с помощью пружины 14 связан с 1. а средняя опора 15 смонтирована е поя- можностью перемещения откосителько корпуса 1 посредством винтовой передачи 16 для регулировки величины подъема и опускания захватов. Ку гач - ки 6 закреплены на валу привода г о мощью д,иска 17 и установлены с вез- можностью взаимодействия е вЬ Ключ а- телем 18 и управляющим пневмоклаг а- ном 19, левая полость которого соединена трубопроводом 20 с пневмосетью и трубопроводом 21 с эжектором 22, а правая полость трубопроводами 23 соединена се вспомогательными механизмами пресса, напрр мер механизмами удаления готовых деталей из зоны пресса.
Вертикгшьньш вал 7 и механическая рука 8 выполнены полыми для уетанов- ки внутри трубопроводов с энергоносителем. Вертика-ггьныр вал 7 смонтирован в подшипниках с возможностью подъема и поворота вокруг своей продольной оси.
0
и-р гика.льного на,- : . оуки Н,. с та
ПМИ И), KJianailFii : уг- еЙГТЯГ 1-рИ I :ipa JbUlO ineur-. if I M;;;- -: iri ол- л ji., м- oi i ТП р(пт,ча гп . . л:), няи1|((ч-о тг:1л( .-.. 1Л(: i4ipa . ,{ ;sec Ko япк, EL ; :: ) I Hrn 2/ г 1Г 1 Г- К/:; Ь:1М W1/ )1: (М OCh ;)Ж(М1 Ч П . i ::
пси нертикальнгго наля /,
Маиипулято оаботает ooua HJM ,
i ИСЧ 1 fI
V-1FII
I - - Т n
I 11I j
1 Ml
111Т IF
1 I I nI
u Tue f n Г
1 17 Пр r i I ( I I И1
П ТГ I бопрс ТГ irт г
1 . Iт ,1Т
т Ь 1Ы 117
HI i 1 Т /В I
прес:са ггсмгры:- и :b:;j. ;: леи для устаиот кн па нем обра Па ае- мой заготовка (не loKa ia-;,; При включении лвигат с-.г я 2 чьр. гге 1едачу 3 и редукт; р 4 (; ие ) ( редается ;улачклм 3 и f: ;; л:;.:1м через рь чажную систему - вертикаль- 1 ому валу 7. В результате н . ствия рычаг, П г участком ci ул;г - к а 5 о с. I - т т т е гс. п.пет-1 irp fi
1 ертика.г н i ем на HP тб J JI
ного I
го, как rvT 5 и i г р i
взаимодр- С Ч He i п
участок
ОЦТ t -1
П1И
прекращаете
лачок 5 участком ; нтг.икпдейг т с шатуном li, i:iapH-ipHO (-вяза; 1гам с рычагом 12, вследс 1 вие чего осуществляются поднятого вертик-зл.- ного вала 7 вокруг продольной ;м:и и перенос детали з рабочую зону 11;там- па. При этом скорость поворота изменяется по гармо 1ическому закону, что об е с.пе чиваег наибольшую л рои з в оди- Т|2льность труда минимальлы.ч ди- намр-:ческих нагрузках,
После поворота кулачка 5 на ролик рычага 13. вновь попадает во впадину участка Ь и описанным путем под действием этого рычага вертикальный вал 7 опускается и захват 10 укладывает заготовки, точно в штамп. При опускании вертикального вала опускается и жестко связанная с ним тяга 27, соединенная в свою очередь с тарельчатым клапаном 25;, который перекрывает выходное отверстие 26 эжектора-22. taKHM образом, слсатый воздух по трубопроводу 24 подается к вакуумному захвату, происходит принудительное отделение заготовки от захвата. Далее осуществляется подъем вертикального вала 7 при взаимодействии с выступом участка ; кулачка и поворот вертикального вала 7 в обратном направлении. При этом кла пан 25 открывает выходное отверстие 26 и сжатый воздух выходит в атмосферу. Таким образом, по трубопроводу 24 подается к захвату разрежение и захват 10 подготовлен к следующему циклу.
После поворота один из кулачков 6 .взаимодействует с выключателем 18, подающим сигнал на включение рабочего хода пресса. Затем после штам- повки заготовки и подъема ползуна пресса другой из кулачков 6 контакти
Составитель й .Бакулина Редактор Н.Швыдкая Техред Л.Олейник Корректор Л.С бручар
Заказ 7004/14 Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб. д, 4/5
„Производственно-полиграфическое предприятие, г.Ужгород, y;i, Прс ектная , ч
г 0 5 0
0
5
pyt T с у jIpaivHRKTUifN ПН с PMiiKJiiliKitRlM 19,
который откры ;;и :- CHOKI полную ио.пость лоля доступа сжат; гр рот.ауха п труГт- провод 23 и дллго - к мехл ппм удаления ГОТОВО дста:1Н ;- зснъ штампа, н априме р, пн е вмо Р а те.гтям,
Цикл окончен, Конс -тныг-; по.ожением является распо.пожение руки н захвата на позиции загрузки.
Формула ;i 3 о б р е т е н и я
Манипулятору содержащи ; механическую руку с пневмат1 ческг.ми захватными органами, установленную на вертикальном валу, связанном посре. вом рычажшэй cиcтe Ф ,с приводом ее подъема и поворота, кулачки, закрепленные на валу редз ктора и взаимодействующие с пневмоклапаном. связанным трубопроводом с пневматически 5и механизмами, и эжектор с клапанным устройством, связанньп; трубопроводом с пневматическими захватными органами, отличающийся тем, что, с целью повышения надежности и точности позиционирования, к.папанное устройство эжектора жестко связано с вepтикaльпы валом посредством дополнительно введенной тяги, при этом ось эжектора параллельна оси вертикального вала.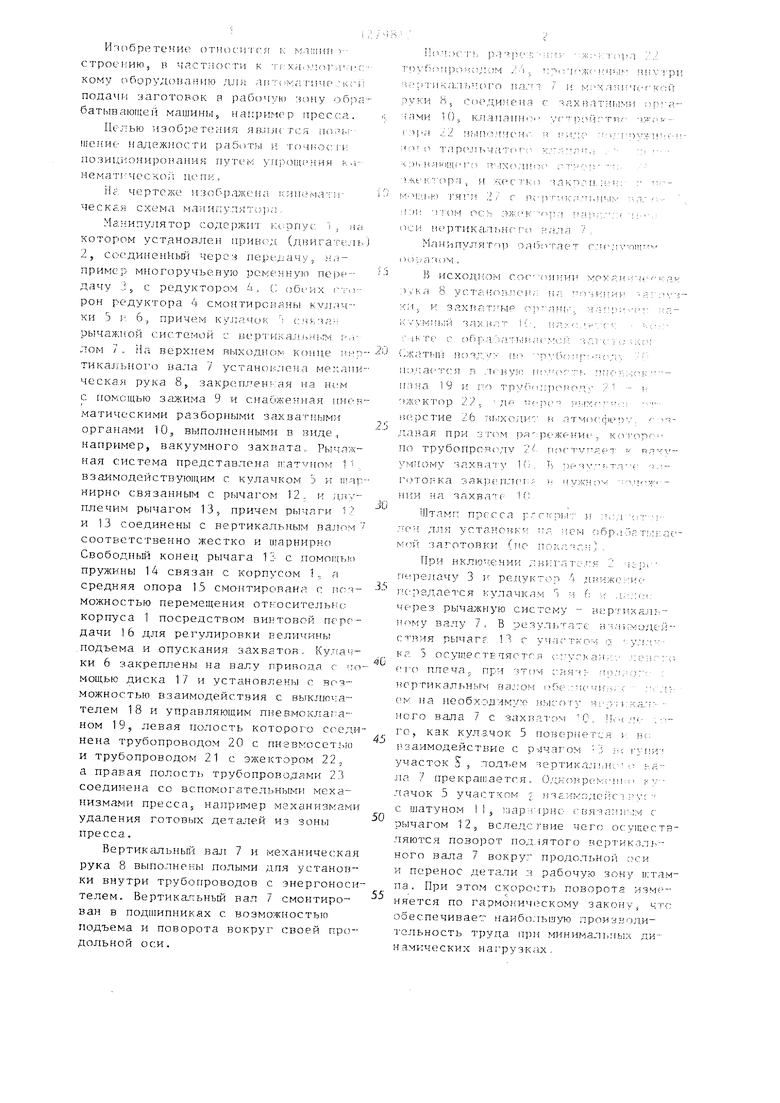
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука механическая к обрабатывающей машине | 1977 |
|
SU725865A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Автоматическая линия безоблойной штамповки | 1980 |
|
SU889482A1 |
| Устройство для подачи заготовки и удаления отштампованных деталей из рабочей зоны пресса | 1990 |
|
SU1785472A3 |
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |
| МАНИПУЛЯТОР С ВАКУУМНЫМ ЗАХВАТОМ | 1995 |
|
RU2099176C1 |
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| Подъемно-поворотное устройство для укладки изделий | 1983 |
|
SU1109235A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Автоматизированная линия горячей штамповки крупных поковок с вытянутой осью | 1991 |
|
SU1822353A3 |
Изобретение относится к области машиностроения, в частности к оборудованию для автоматической подачи заготовок в рабочую зону обрабатывающей машины, например пресса. Целью изобретения является повышение надежности работы и точности пояидрго- нироваиия путем упрощения кинематической цепи. В манипуляторе клапанное устройство 25 эжектора 22 жестко свяяа -го с вертикальным валом 7, на которс М установлена механическая рука 8 с вакуумнык захватом 10. Подъем и поворот вокруг оси вертикально- ) о вала 7 ос чцеств.чяется от привода 2 через кулачок 5, при этом подъем и опускание вертикального вала 7 приводит к открь ва1П1ю и закрыванию клапанного устройства 25 эжектора 22. Захват заготовки на пози.ции загрузки и укладки ее в штамп выполняются ва куумн1,1м захватом 10 с помощью эжектора 22, создающего в вакуумном захвате раз1)ежение или при подводе к нему - давления из пневмосети. 1 ил. to -J р-7,гтА.
| Рука механическая к обрабатывающей машине | 1977 |
|
SU725865A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
