1281403
на колонке 2 механические руки с захватными органами 3 и приводами вьщвижения. Манипулятор снабжен механизмом 11 кантования, выполненным в виде силового цилиндра, корпус 12 которого смонтирован в корпусе 4, а на его внутренней поверхности закреплены пальцы 13, взаимодействующие с боковыми поверхностями винто1
Изобретение относится к автоматическим загрузочным устройствам и может быть использовано для работы в автоматизированных станочных комплексах и автоматических линиях раз- личньпс производств, I
Целью изобретения является расширение технологических возможностей за счет обеспечения дополнительной степени подвижности.
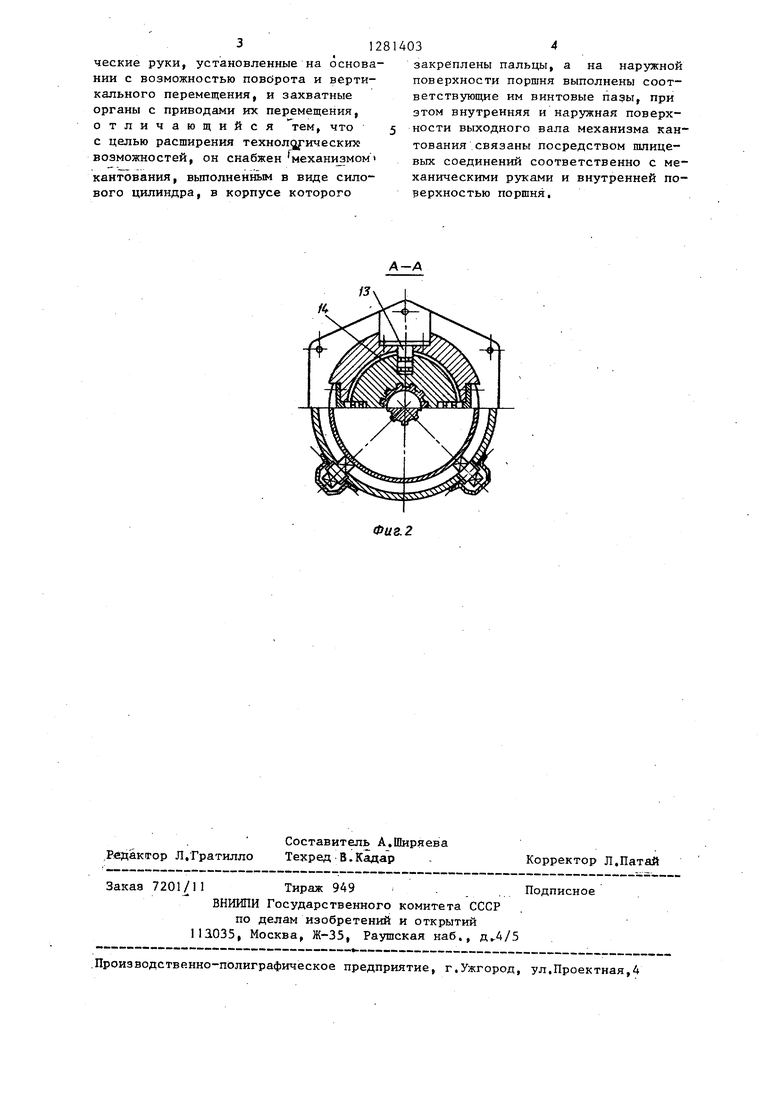
На фиг,1 изображен манипулятор, общий вид; на фиг,2 - сечение на фиг.1.
Манипулятор содержит основание 1 со встроенным приводом поворота, колонку 2 с приводом вертикального перемещения механических рук. Механические руки с захватными органами 3 соосно размещены в корпусе 4, установленном на выходном элементе привода вертикального перемещения. Механические.руки выполнены
I в виде корпусов 5, на роликовых направляющих 6 которого установлены захватные органы 3 с приводами их зажима-разжима, Связанные с выходными валами 7 механических рук посредством фланцев 8, Приводы перемещения механических рук выполнены в виде силовых цилиндров 9, корпуса которых смонтированы на наружной поверхности корпуса 4, а их штоки 10 жестко связаны с корпусами 5 механических рук.
Внутри корпуса 4 соосно выходным валам 7 механических рук установлен механизм 11 кантования, выполненный в виде силового цилиндра, корпус 12 которого смонтирован в корпусе 4, а
на его внутренней поверхности закреп лены пальцы 13, взаимодействующие
3
вых пазов 14, выполненных на ка- ружний поверхности поршня 15, При этом внутренняя и наружная поверхности выходного вала 6 механизма .11 кантования связаны посредством шлицевых соединений соответственно с выходными валами 7 механических рук и внутренней поверхностью порш- .ня 15, 2 ил.
с боковыми поверхностями винтовых пазов 14, выполненных на наружной поверхности поршня 15. Причем внутрен- няя и наружная поверхности выходного вала 16 механизма 11 кантования связаны посредством шлицевых соедине НИИ соответственно с выходными валами 7 мekaничecкиx рук и внутренней поверхностью поршня 15.
Манипулятор работает следующим образом.
Поступательное движение поршня 15, возникакнцее при подаче рабочего тела в рабочую полость механизма I1
кантования, преобразуется во вращательное движение в результате воздействия пальцев с боковыми поверхностями винтовых пазов 14 наружной поверхности поршня 15. Вращательное
движение посредством шлицевых соединений внутренней поверхности поршня . 15 с наружной поверхностью выходного вала 16 механизма кантования и внутренней поверхности выходного вала 16 с выходными валами 7 механических рук сообщается одновременно обоим захватным органам 3.
Так обеспечивается поворот (кантование) захватных органов 3 вокруг оси корпуса 4. Выдвижение механических рук осзтцествляется силовыми цилиндрами 9. Подъем-опускание механических рук вызьгоает привод подъема-опускания, встроенный в йоворотную
колонку 2, а поворот механических рук вокруг вертикальной оси - привод, встроенный в основание ,
40
Формула изобретения
Манипулятор, содержащий основание, две соосно размещенные механические руки, установленные на основании с возможностью поворота и вертикального перемещения, и захватные органы с приводами их перемещения, отличающийся тем, что с целью расширения технологических возможностей, он снабжен механизмом кан гования, вьтолненйым в виде силового цилиндра, в корпусе которого
закреплены пальцы, а на наружной поверхности поршня выполнены соответствующие им винтовые пазы, при этом внутренняя и наружная поверхности выходного вала механизма кантования связаны посредством шлице- вых соединений соответственно с механическими руками и внутренней поверхностью поршня.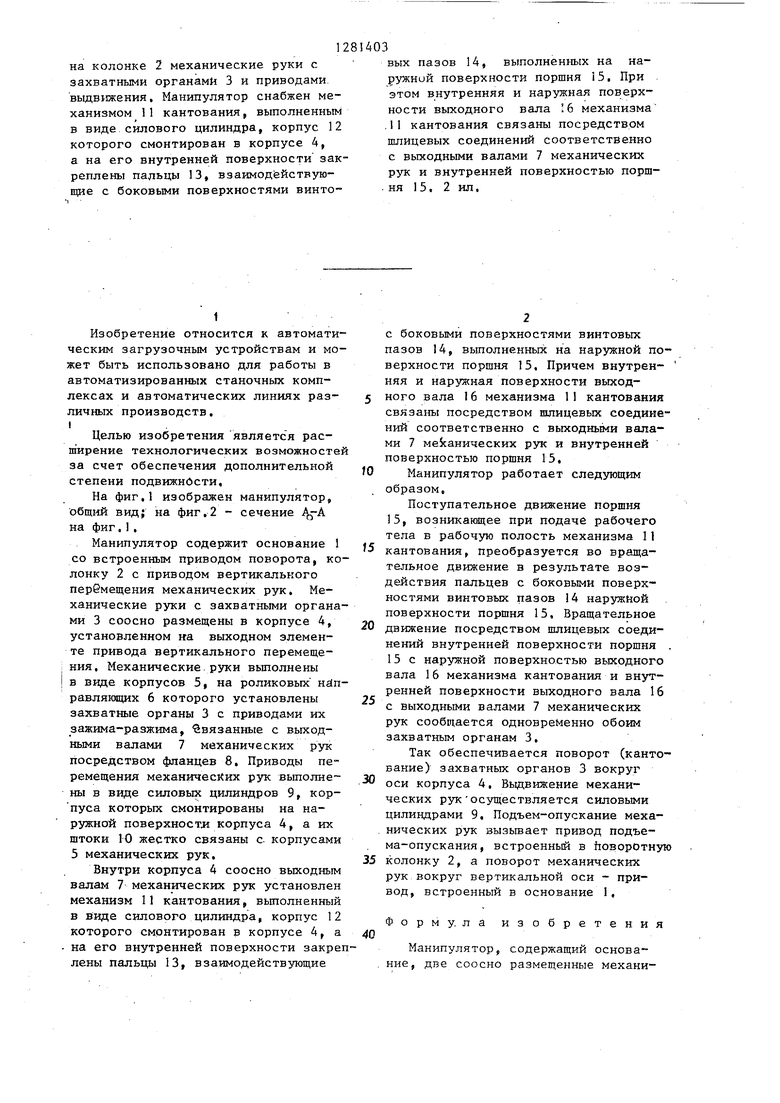
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1984 |
|
SU1162534A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
| Минипулятор | 1990 |
|
SU1743849A1 |
| Манипулятор | 1982 |
|
SU1065185A1 |
| Манипулятор | 1981 |
|
SU1007960A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Установка для термомеханического упрочнения изделий | 1990 |
|
SU1740454A1 |
Изобретение относится к автоматическим загрузочным устройствам. Целью изобретения является расширение технологических возможностей за счет обеспечения дополнительных степеней подвижности. МанипулятЬр содержит основание 1, поворотную колонку 2 и дв соосно установленные / / / 3 т // 7 ff ю ЙЛ /24 16 д Х u D :о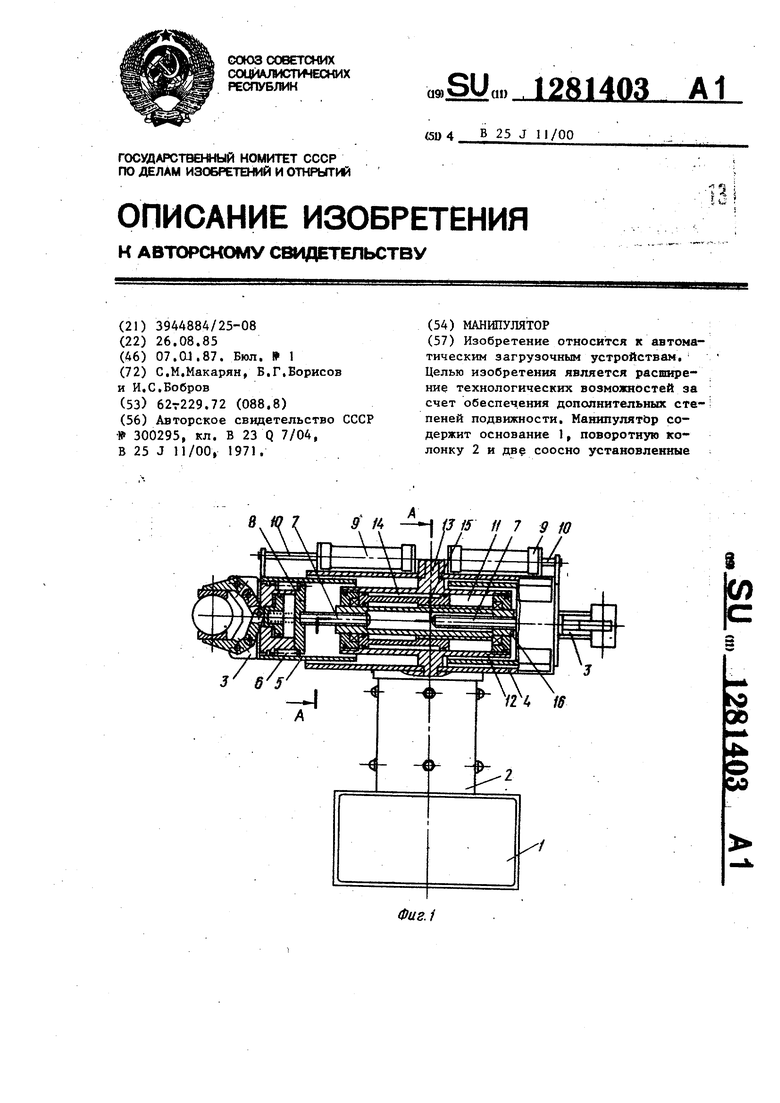
Л
.Редактор Л.Гратилло
Составитель А.Ширяева Техред В.Кадар
Заказ 7201/11 Тираж 949 . ... Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий I13L035, Москва, Ж-35, Раушская наб,,
.Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор Л.Патай
| АВТООПЕРАТОР | 0 |
|
SU300295A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
