Изобретение относится к загрузочным устройствам для деталей типа тел вращения.
Известны манипуляторы, у которых по колонне перемещается траверса, имеющая поворотное перемещение в горизонтальной плоскости и снабженная рукой, несущей захваты.
Цель изобретения - обеспечение независимости поворота рук автооператора вокруг общей оси.
Для этого механизм поворота рук выполнен Б виде соосных, расположенных один в друго.м и связанных с приводом посредством зубчатой передачи валов с укрепленными на них поводками, соединенными с обоймами рук. Захватные органы рук выполнены перемещаемыми в .
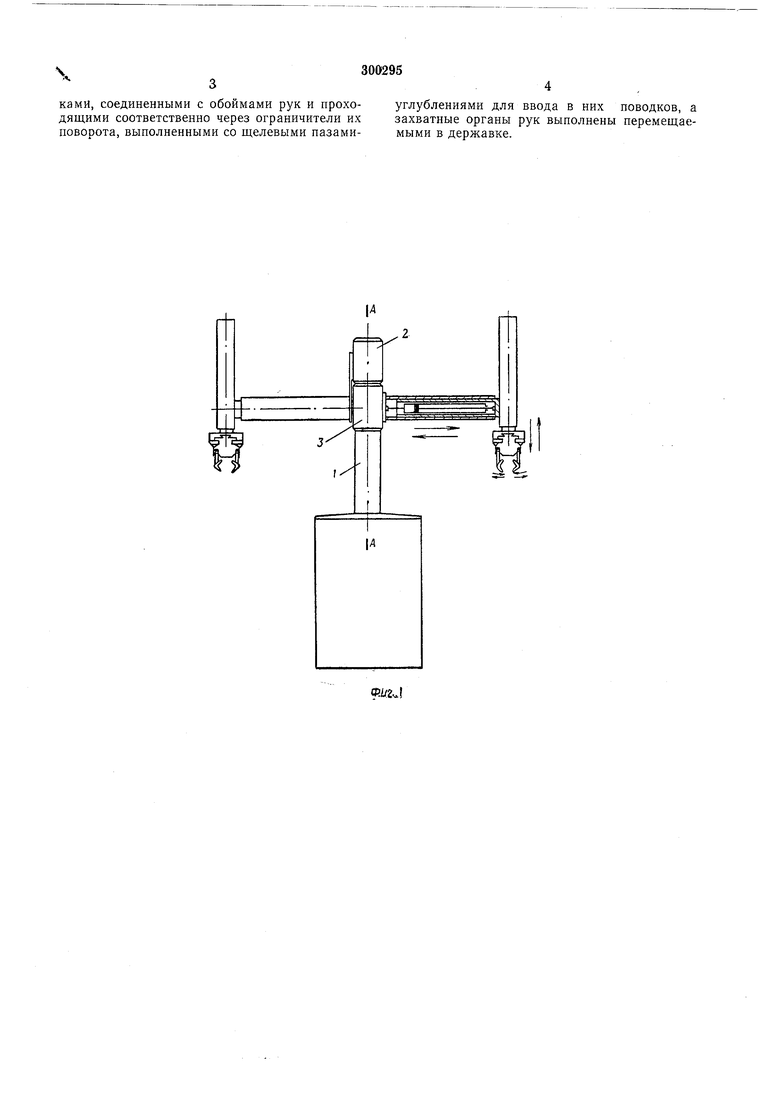
На фиг. 1 показан описываемый автооператор, вид сбоку; на фиг. 2-разрез по Л-Л на фиг. 1; на фиг. 3 - захватный орган, вид сбоку; на фиг. 4 - разрез по Б-Б на фиг. 3.
Автооператор смонтирован на основании / и имеет две руки с обоймами 2 я 3, поворачивающиеся независимо друг от друга вокруг вертикальной оси в противоположных горизонтальных секторах. Поворот обойм осуществляется водилами 4 к 5. Водило 5 закреплено на верхнем конце полого стержня 6, водило 4 - на верхнем конце стержня 7, проходящего внутри стержня 6. Нижние концы стержней снабжены шестернями 8, сцепленными с рейками 9. Последние жестко связаны со щтоками силовых цилиндров 10. Горизонтальные выступы водил 4 и 5 проходят через секторные отверстия опор 11, 12 и входят в пазы обойм 2, 3. Угол поворота обойм определяется углами секторных отверстий и составляет 180°.
Захваты смонтированы на державках 13, имеющих посредине направляющие в виде ласточкина хвоста и два параллельно расположенных отверстия, являющиеся силовыми цилиндрами. По направляющим перемещаются каретки 14, снабженные силовым цилиндром и рычажным механизмом, приводящим в движение захваты. В отверстиях державок 13 установлены поршни с двусторонними штоками 15. Штоки упираются в кронштейны 16, жестко связанные с каретками 14. Рабочее тело к силовым цилиндрам захватов подводится через штуцеры 17.
Предмет изобретения
Автооператор, на основании которого установлены поворотные руки с державками и захватными органами, отличающийся тем, что, с
25 целью независимости поворота рук вокруг общей оси, механизм поворота рук выполнен в виде соосных, располол енных один в другом и связанных с приводом посредством зубчатой 30 передачи валов с укрепленными на них поводками, соединенными с обоймами рук и проходящими соответственно через ограничители их новорота, выполненными со щелевыми пазамиуглублениями для ввода в них поводков, а захватные органы рук выполнены перемещаемыми в державке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Автооператор | 1985 |
|
SU1283035A1 |
| Устройство для маркировки изделий | 1983 |
|
SU1141022A1 |
| Автооператор | 1986 |
|
SU1335409A1 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Автооператор | 1983 |
|
SU1159757A1 |
| Автооператор | 1974 |
|
SU554129A1 |
| АВТООПЕРАТОР | 1965 |
|
SU174928A1 |
| АВТООПЕРАТОР МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 2005 |
|
RU2296039C2 |
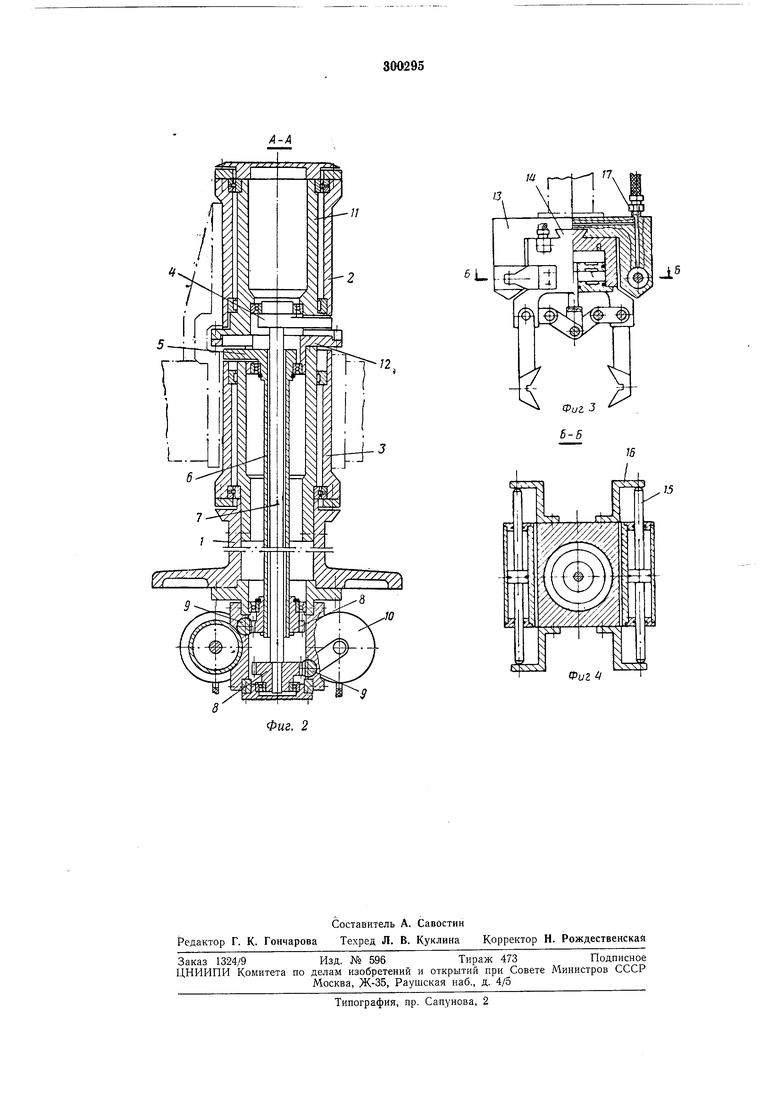
Фиг. 2
Ш р 7.
Фиг 4
