112
Изобретение относится к станкостроению и может быть использовано в робототехнических устройствах, приме няемых преимущественно в таких отраслях промьпиленности, где техноло- гический процесс сопровождается вьще лением тепла, например, химической, литейной и других отраслях.
Целью изобретения является упрощение конструкции и повьаиение быстродействия ,
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - схема упругой связи губок.
Устройство содержит корпус 1, в котором на осях установлены два зубчатых колеса 2 и 3. На зубчатых колесах 2 и 3 жестко закреплены губки 4 и 5. Соосно зубчатым колесам 2 и 3 соответственно закреплены одинаковые блоки 6 и 7, 5 образно огибаюпщеся криволинейной лентой 8 из сплава с термомеханической памятью, имеющей радиус кривизны, равный радиусу блоков 6 и 7, при этом концы ленты 8 жестко закреплены на блоках б и 7,
На фиг. 1 радиус кривизны ленты 8 направлен в сторону блока 6, при этом участки, соприкасающиеся с блоком 7, изогнуты в противоположную сторону. На губках 4 и 5 посредством шарниров 9 закреплены концы возвратной пружины 10, при этом траектория перемещения шарниров 9 пересекает линию центров зубчатых колес 2 и 3 за пределами отрезка, соединяющего эти центры. Для уменьшения потерь тепла блоки 6 и 7 изготовлены из теплонепроводящего материала.
Работа устройства построена на равновесии .сил, действующих на систему зубчатые колеса 2, 3 и бло- . ки 6,7.
При подводе схвата к захватываемому объекту термочувствительная лен та 8 подвергается тепловому воздействию. Допустим, что захватываемый объект находится в зоне, температура которой выше температуры структурного превращения сплава (например в печи). Через некоторое время термочувствительная лента 8 нагревается выше температуры структурного превращения сплава и проявляет эффект гермомеханической памяти,. При-этом термочувствительная лента 8 ся принять радиус кривизны, равный радиусу блоков 6 и 7, т.е. стремится восстановить заданную форму. Возникающие при этом восстанавливаю- напряжения создают усилие, -которое стремится термочувствительную ленту 8 перематывать с блока 7 на блок 6, так как в сторону последней направлен радиус кривизны ленты 8. В результате взаимодействия термочув ствительной ленты 8 с блоками 6 и 7, 45 который стремится систет-гу зубчатые колеса 2 и 3 - блоки 6 и 7 из исход- кого положения (на фиг. 1) тонкими линиями показано пололсение губок 4 и 5, соот ветствующее исходному положению указан
Для сплавов на основе никелида титана присуще резкое изменение механических свойств при переходе из одного структурного состояния в другое. Например, при переходе из, низ- котемпературного состояния в высоко- 50 Ной системы, а положение термочув- температурное модуль упругости спла- .ствительной ленты 8, соответствующее
ва возрастает примерно в 10 раз. Такие сплавы име5от температуры структурного перехода порядка 40-100 С и вьш1е этой температуры проявляют эффект памяти формы. При этом в сплаве возникают значительные восстанавливающие напряжения, которые стремятся придать изделию заданную
минимальному количеству потен1ц-5аль- ной энергии термочувствительной ленты 8, - пунктиром. Этот момент стре- 55 мится блок 6 с зубчатым колесом 2 привести во вращение по часовой стрелке, а блок 7 с зубчатым колесом 3 - во вращение против часовой стрелки. Однако вращающему моменту
0
5
форму. Форма термочувствительному элементу (т.е. придание термочувствительной ленте постоянного радиуса кривизны) задается путем отжига такого элемента в заневолированном состоянии при температуре 450-500°С с вьудержкой 1 ч. К деформированной термочувствительной ленте в низкотемпературном состоянии следует приложить внешнее усилие, при этом усилие, необходимое для деформирования ленты в низкотемпературном состоянии, на порядок ниже усилия, развиваемого лентой при восстановлении ее формы в высокотемпературном состоянии. Согласно изобретению де- формирующим элементом является воз- вратная пружина, которая заряжается (растягивается) при восстановлении формы термочувствительной лентой.
При подводе схвата к захватываемому объекту термочувствительная лента 8 подвергается тепловому воздействию. Допустим, что захватываемый объект находится в зоне, температура которой выше температуры структурного превращения сплава (например, в печи). Через некоторое время термочувствительная лента 8 нагревается выше температуры структурного превращения сплава и проявляет эффект гермомеханической памяти,. При-этом термочувствительная лента 8 ся принять радиус кривизны, равный радиусу блоков 6 и 7, т.е. стремится восстановить заданную форму. Возникающие при этом восстанавливаю- напряжения создают усилие, -которое стремится термочувствительную ленту 8 перематывать с блока 7 на блок 6, так как в сторону последней направлен радиус кривизны ленты 8. В результате взаимодействия термочувствительной ленты 8 с блоками 6 и 7, 45 который стремится систет-гу зубчатые колеса 2 и 3 - блоки 6 и 7 из исход- кого положения (на фиг. 1) тонкими линиями показано пололсение губок 4 и 5, соответствующее исходному положению указан0
5
0
35
0
0 Ной системы, а положение термочув- .ствительной ленты 8, соответствующее
минимальному количеству потен1ц-5аль- ной энергии термочувствительной ленты 8, - пунктиром. Этот момент стре- 55 мится блок 6 с зубчатым колесом 2 привести во вращение по часовой стрелке, а блок 7 с зубчатым колесом 3 - во вращение против часовой стрелки. Однако вращающему моменту
3
системы сопротивляется момент, соз- даваемзяй возвратной пружиной 10.
В момент,когда вращающий момент системы, создаваемый термочувствительной лентой 8, становится больше момента сопротивления, создаваемого возвратной пружиной 10, зубчатые колеса 2 и 3 с блоками 6 и 7 начинают поворачиваться в указанных направлениях, а термочувствительная лента 8 начинает с блока 7 перематываться на блок 6. Вместе с зубчатми колесами 2 и 3 поворачиваются губки 4 и 5, в результате чего они сходятся и происходит захват объек- та. При этом момент сопротивления вращению, создаваемый возвратной пружиной 10, уменьшается, так как уменьшается расстояние 8 между осью пружины 10 и линией, проведенной через центры зубчатых колес 2 и 3, т.е. момент сопротивления уменьшается в результате уменьшения плеча действия усилия возвратной пружины 10. В момент соприкосновения губок 4 и 5 с захватываемым объектом расстояние S уменьшается до нуля, а суммарный вращаюрщй момент системы принимает максимальное значение. . После соприкосновения губок с зах- ватываемым объектом вращение зубчатых колес 2 и 3 с блоками 6 и 7 прекращается, а объект удер}кивается в захваченном положении,так как термо чувствительная лента 8 продолжает о оставаться в высокотемпературном сотоянии и определенная ее часть еще находится в деформированном состоянии (участки, находящиеся на блоке 7), за счет действия которой поддер живается усилие зажима губок 4 и 5.
Разжим губок 4 и 5 происходит при вращении блоков 6 и 7 и зубчаты колес 2 и 3 в обратном направлении. Для этого к термочувствительной лен те 8 подводится холодная среда, например схват из высокотемпературной зоны выносится в открытый воздух. В холодной среде температура термочувствительной ленты 8 падает и че- рез некоторое время понижается циже температуры структурного превращени сплава. Переход термочувствительной ленты 8 из высокотег-шературного в низкотемпературное состояние сопро- вождйется резким снижением модуля упругости материала, в результате чего она становится сравнительно легко деформируемой. Так как положе
ние равновесия возвратной пружины 10 является неустойчивым, то она легко выводится из положения равновесия и создает момент, который приводит систему зубчатые колеса 2 и 3 - блоки 6 и 7 во вращение в обратном направлении. Одновременно лента 8 с блока 6 перематьшается на блок 7 и деформируется. Таким образом, происходит разжим губок 4 и 5 и звенья устройства возвращаются в исходное положение.
Далее процесс может циклически повторяться.
Путем изменения плеча а и b губок
4и 5 устанавливается положение шарниров 9 относительно центров зубчаты
колес 2 и 3. Для обеспечения надежного разжима губок 4 и 5 ось возвратной пружины 10 должна не доходить до центров зубчатых колес 2 и 3 в момент соприкосновения губок 4 и
5с захватываемым объектом (8 0), а для обеспечения повышенной надежности зажима ось возвратной пружины 10 при захвате должна переходить через линию центров зубчатых колес
2 и 3. Однако в последнем случае разжим губок 4 и 5 можно осуществить лишь приложением внешнего разжимающего усилия к губкам 4 и 5. Установка режима работы возвратной пружины 10 соответствует одновременно наладке, устройства под размер захватьгеае- мого объекта. Такое устройство может работать и в обратном цикле движения губок 4 и 5, т.е. при нагреве термочувствительной 8 губки 4 и 5 могут разжиматься, а при охлаждении термочувствительной ленты 8 - сжиматься. Для этого следует радиус кривизны термочувствительной ленты 8 направить в сторону блока 7, а возвратную пружину 10 закрепить на губ- ках 4 и 5 в противоположной стороне от линии центров зубчатых колес 2 и 3. В этом режиме работы схвата возвратная пружина 10 работает в качестве аккумулятора механической энергии, заряжаемого при восстановлении формы термочувствительной лентой 8. В таком режиме работающий схват может успешно применяться в.паре со схва- том, работающим в основном режиму,.
Формула изобретения
Захватное устройство, содержащее корпус, в котором установлены два
51
входящих в зацепление зубчатых колеса с закрепленньп-ш на них губками и привод их перемещения, отличающееся тем, что, с целью упрощения конструкщш и повьшения быстродействия, привод перемещения губок выполнен в виде ленты S-образ- ной формы из материала, обладающего свойством памяти формы, огибающей своими криволинейными участками
283П916
жестко связанные с зубчатыми коле- сами и соосные им блоки, причем концы ленты закреплены на этих блоках, а губки подпружинены друг относитель но друга посредством упругого элемента, концы которого шарнирно связаны с губками с возможностью перемещения осей щарниров упругого элемента по траектории, пересекающей плоскость
10 проходящую через оси зубчатых колес ,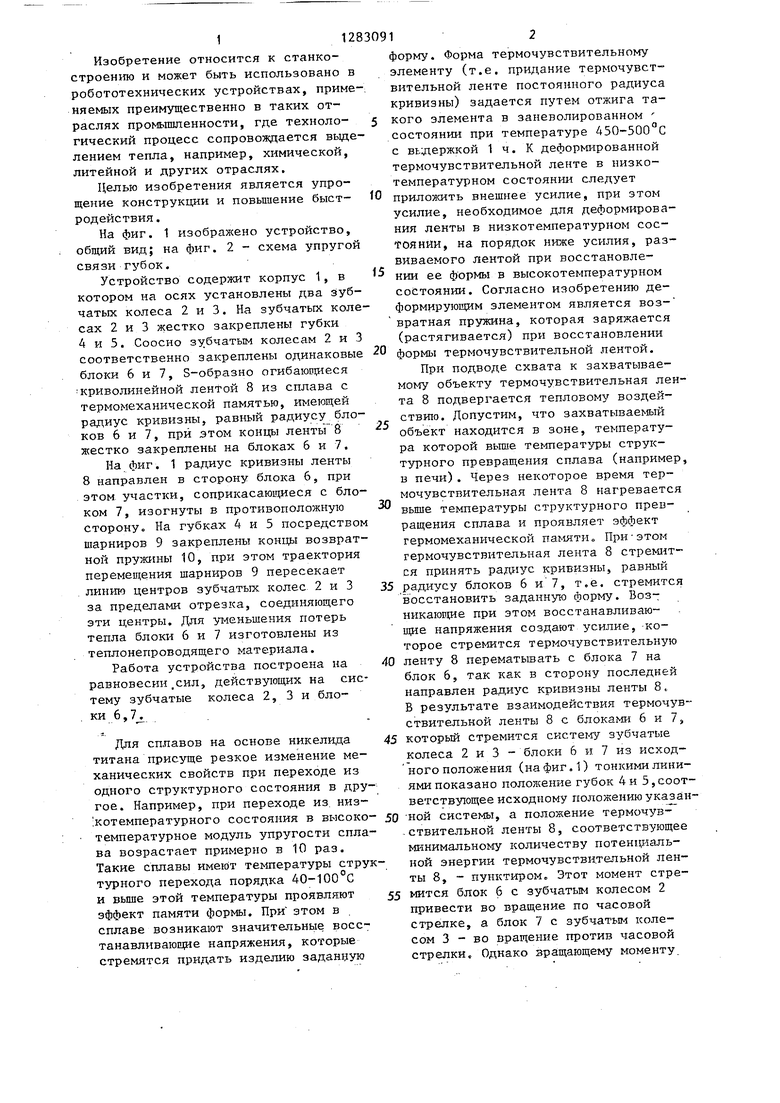

| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Терморегулятор | 1983 |
|
SU1234815A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Стержневой манипулятор | 1990 |
|
SU1726236A1 |
| Схват | 1983 |
|
SU1093546A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |

Изобретение относится к области станкостроения и может быть использовано в робототехнических устройствах, применяемых преимущественно в таких отраслях промьшшенности, где технологический процесс сопровождается выделением тепла, например химической, литейной и других отраслях. Цель изобретения - упрощение конструкции и повышение быстродействия . Устройство содержит корпус 1, в в котором установлены два зубчатых колеса 2 и 3 с закрепленными на них губками 4 и 5, взаимодействующими с возвратной пружиной, и привод. Привод вьтолнен в виде двух блоков 6 и 7, соосно закрепленных на зубчатых колесах соответственно и S - образной термочувствительной ленты 8 из сплава с термомеханической памятью, при этом концы ленты закреплены на блоках 6 и 7, а на губках 4 и 5 шарнирно закреплены концы пружины таким образом, что траектории перемещения осей шарниров пересекают ЛИНИЮ центров зубчатых колес 2 и 3. 2 ИЛ, (У) t 00
Фи.2
| КЛЕЩЕВОЙ ЗАХВАТ | 0 |
|
SU278067A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
