Изобретение относится к устройствам перемещения рук роботов и может быть использовано при разработке конструкций автоматических манипуляторов.
Цель изобретения - снижение габаритов и улучшение динамических характеристик шарнира манипулятора.
На чертеже показан шарнир манипулятора.
Шарнир содержит втулки 1 и 2, установленные с возможностью вращения вокруг осей звеньев 3 и 4 соответственно. Звенья 3 и 4 соединены карданным валом 5. В канавке 6, выполненной на внутренней поверхности втулки 2, расположен ролик 7 роликового синусного механизма. Он зак- реплен на конце .штока 8, взаимодействующего с пружиной сжатия 9, расположенной в корпусе 10, закрепленном на оси звена 4. Пружина 9 одним концом взаимодействует со штоком 8, а другим концом - с ввинченным в крыиису корпуса 11 винтом 12.
Шарнир работает следующим образом
При вращении втулки 2 ролик 7, взаимодействуя со стенкой канавки 6 перемещает шток 8 в корпусе 10, сжимая пружину 9. Так как канавка 6 имеет форму синусоиды, усилие, действующее со стороны пруткины 9 на ролик 7, также изменяется по синусоидальному закону. При этом расположеРедактор К. Волощук Заказ 7344/14
Составитель А. Позняк
Техред Л.Сердюкова Корректор М. Максимишинец
Тираж 949Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
. Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
5
0
5
0
нию звена 1 в крайнем нижнем положении соответствует наибольшая деформация пружины 9. Подъем звена при вращении втулки 2 уменьшает деформацию пружины 9, что приводит к уменьшению уравновешивающего усилия, приложенного к втулке 2. Усилие сжатия пружины 9 можно регулировать перемещением винта 12 в крьш1ке 11 корпуса, изменяя тем самьм в определенных пределах максимальную величину уравно- аешиваюп1его усилия в зависимости от величины перемещаемого груза.
Формула изобретения
Шарнир манипулятора, содержащий звенья, соединенные карданным валом, и смонтированные на них втулки со скошенными торцами, снабженные индивидуальными приводами, о т л и ч а - ю щ и и с я тем, что, с целью снижения габаритных размеров и улучшения динамических характеристик, он снабжен механизмом уравновешивания, выполненным в виде роликового синусного механизма, ролик которого расположен в канавке, выполненной на внутренней поверхности втулки одного из звеньев и имеющей форму синусоиды, а шток синусного механизма подпружинен относительно втулки с возможностью регулировки упругого элемента.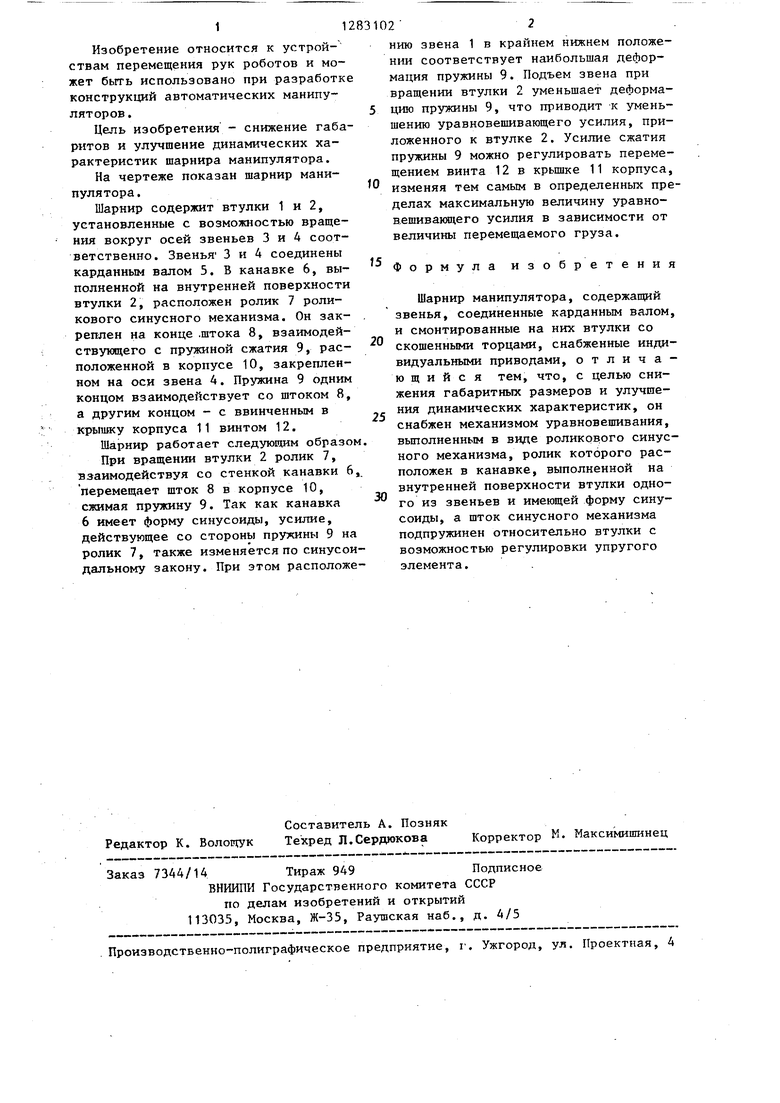
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| Автомат для навивки пружин | 1979 |
|
SU860922A1 |
| Сбалансированный манипулятор | 1986 |
|
SU1379105A1 |
| Промышленный робот | 1980 |
|
SU931463A1 |
| Шарнир манипулятора | 1989 |
|
SU1771960A1 |
| Стенд для испытания цепей | 1986 |
|
SU1449854A2 |
| Манипулятор | 1973 |
|
SU460682A1 |
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| Вакуумный манипулятор | 1990 |
|
SU1754442A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
Изобретение относится к устройствам перемещения рук роботов и может быть использовано при разработке конструкций автоматических манипуляторов . При вращении втулки 2 ролик 7, взаимодействуя со стенкой канавки 6, перемещает шток 8 в корпусе 10, сжимая пружину 9. Так как канавка 6 имеет форму синусоиды, усилие, действующее со стороны пружины 9 на ролик 7, также изменяется по синусоидальному закону. При этом расположению звена 1 в крайнем нижнем положении соответствует наибольшая деформация пружины 9, Подъем звена 1 при вращении втулки 2 уменьшает деформацию пружины 9, что приводит к уменьшению уравновешивающего усилия, приложенного к втулке 2. Усилие сжатия пружины 9 можно регулировать перемещением винта 12 в крьш1ке 11 корпуса, изменяя тем самым в определенных пределах максимальную величину уравновешивающего усилия в зависимости от величины перемещаемого груза.1 ил. Q S (Л 72
| Устройство перемещения руки робота | 1980 |
|
SU905065A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
