валик 3 посредством регулятора 14 частоты вращения гидродвигателя 9 будет воздействовать на положение регулирующей щай- бы, установленной в замкнутой системе циркуляции гидронасоса 1 и гидродвигателя 9, тем самым увеличивая или уменьшая подачу гидронасосом 11 жидкости к гидродвигателю 9. Регулятор 14 частоты враще1
Изобретение относится к устройства.м регулирования натяжения, а именно к устройствам регулирования натяжения длинномерного материала.
Цель изобретения - новыщение точно- сти регулирования за счет стабилизации в момент разгона и торможения.
На фиг. 1 представлена принципиальная схема устройства; на фиг. 2 - структурная схема устройства с обозначением блоков в операторной форме.
Устройство содержит разматываемый рулон 1 длинномерного материала, ленто- приводящие валики 2, амортизационный валик 3, установленный на двух рычагах подвески 4. закрепленных на его оси кача- ния, и нагружающий механизм 5, который выполнен в виде пневмоцилиндра, поршень которого кинематически связан с амортизационным валиком 3. Полость цилиндра, обращенная к амортизационному валику 3, связана с атмосферой, а другая полость - с источником сжатого воздуха. Устройство содержит также тянущие цилиндры 6, соединенные через приводной редуктор 7 с электродвигателем 8, гидродвигатель 9, соединенный через размоточный редуктор 10 с рулоном 1, регулируемый гидронасос II, соединенный гидролиниями с гидродвигателем 9 и образующий с ним замкнутую систему циркуляции жидкости, снабженную подпиточными 12 и предохранительными 13 клапанами, причем гидронасос 11 через приводной редуктор 7 механически соединен с тянущими цилиндрами 6. Регулятор 14 частоты вращения гидродвигателя 9 состоит из потенциометра 15 и тахогенератора 16, механически связанных с осью качения амортизационного валика 3, задатчика 17 исходного положения амортизационного валика и последовательно соединенных электронного 18 и электрогидравлического 19 усилителей. При этом вход электронного усилителя 18 соединен с выходами потенциометра 15, тахогенератора 16 и задатчика 17 исходного положения амортизационного валика. Гидропривод 20 регулирующей щайбы связан с выходом электрогидравлическо
ния гидродвигателя 9 включает потенциометр 15 и тахогенератор 16, кинематически связанные с амортизационным валиком 3, а выходами - через электронный усилитель 18 и электрогидравлический усилитель 19 с гидроприводом 20 регулирующей щайбы, который связан с потенциометром 21. 2 ЗЛ1. ф-лы, 2 ил.
0 5 О 5
0
го усилителя 19 и входом потенциометра 2i, выход которого подключен к входу электронного усилителя 18.
Устройство работает следующим образом.
При включении электродвигателя 8 тянущие цилиндры 6 осу1цествляют подачу материала, натяжение которого обспечивается нагружающим механизмом 5 амортизационного валика 3. Необходимая сила натяжения обеспечивается подачей в полость пневмоцилиндра нагружающего механиз.ма 5 воздуха под определенным давлением. Натяжение .материала создает вращающий момент на оси руклона 1, который через размоточный редуктор 10 передается гидродвигателю 9. При установившемся движении разматьЕваемого материала гидродвигатель 9 работает в насосном режиме, питая гидронасос 1 1, работаюп ий в это время в двигательном режиме. При этом энергия, затраченная на привод рулона 1 и гидродвигателя 9, возвращается от гидронасоса 11 через приводной редуктор 7 к тяну- 1ЦИМ цилиндрам 6 (за вычетом механических потерь).
При быстром разгоне из-за большого инерционного момента рулона 1 вращающий момент, создаваемый силой натяжения .материала, будет недостаточным для сообщения рулону 1 нужного ускорения. Окружная скорость тянущих цилиндров 6 в этом случае превышает окружную скорость рулона 1. Петля разматываемого материала, охватывающая а.мортизационный валик 3,вырабатывается, а амортизационный валик 3 перемещается. Поворот оси качания амортизационного валика 3 с помощью регулятора 14 преобразуется в поворот регулирующей П1айбы гидронасоса 11, что вызывает увеличение его подачи, а следовательно, увеличение частоты вращения гидродвигателя 9 и соединенного с ни.м рулона 1. Благодаря этому окружные скорости рулона 1 и тянущих цилиндров 6 выравниваются.
При равенстве окружных скоростей руло- iia I и тянущих цилиндров 6 длина петли разматываемого материала, охватывающая
амортизационный валик 3, остается неизменной. Ось вращения валика 3 находится в покое и занимает положение, соответствующее текущему радиусу рулона 1.
При неравенстве окружных скоростей, вызванном, нанример, уменьщением радиуса рулона 1 в процессе разматывания, длина петли начинает изменяться, а амортизационный валик 3 перемещается в сторону, определяемую знаком разности скоростей.
Тахогенератор 16 выполняет роль ста- билизирующего элемента в устройстве. На его выходе вырабатывается напряжение, пропорциональное скорости перемещения амортизационного валика 3. Совместно с потенциометром 15, на выходе которого вырабатывается напряжение, пропорциональное перемещению амортизационного валика 3, Тахогенератор 16 формирует пропорционально-дифференциальный закон регулирования, посредством чего обеспечиваются необходимые устойчивость и качество регули- рования. С помощью задатчика 17 выбирается исходное положение амортизационного валика 3.
Потенциометр 21 формирует внутреннюю отрицательную обратную связь в регуляторе, обеспечивая его свойствами позицион- ного звена. Это поз воляет осуществлять .пропорциональную отработку входного сигнала регулятором 14, формируемого потенциометром 15 и задатчиком 17 на входе электронного усилителя 18.
Динамические свойства устройства как замкнутой системы автоматического уп- ра вления процессом разматывания (фиг. 2) описываются системой уравнений
(Ои12е cod-f я(5)соаР;
шР H(S)cod+ (М,- FR)/ip;
MS Z N;
X.SZ Vu- Vn;
e WperZ+ Уз,
е л(5)т(Т„5+1), Тл. V/т; H(S)+e(T,,S+ 1); Тн Ър/в;
Kr.+ 2К„г+ 4Км;
UD/
.
2
I, Jnj JfOT-f- Jp/l pi
2Еай ir+ а)н/(0в, ip ffls/co, 1ч м «/а);
)цНч, VP+ coR;
Я соза+ cosp;
Wper Knd-fCjiS);
Wper
Kpe
TsryS -)- S-f- Kper Кос. Ку Кзгу Кг, Тп Кт/Кп.
Приведенные параметры определяют я(5), H(S) -операторы потерь и нагрузки; - постоянные времени операторов;
т, V - коэффициенты статической и дина .ми ческой пода тл и вост.и гидропривода;
КЕ - приведенный коэффициент утечек и перетечек;
VT, KHT.KJOI- коэффициенты утечек, гтерете- чек и расхода через подпи- точный клапан 12;
Wii, cod - характерные объемы гидронасоса 11 и гидродвигателя 9,
со, (О - частота вращения роторов гидронасоса 1 I и гидродвигателя 9, рад/с;
ш,ш-частота вращения тянущих цилиндров 2 и рулона,1, рад/с; , in, ip- гидравлическое и кинематические передаточные отношения; а, р - углы наклона ветвей разматываемой ленты к направлению нагружающего механизма 5, рад;
ш-масса амортизационного валика 3, приведенная к его ос движения, кг;
Зр. Зрот - моменты инерции рулона 1 и ротора гидродвигателя 9,
кг-м
5
5
0
5
0
5
Зпр -
R, На
момент инерции рулона 1 и элементов размоточного устройства, приведенный к ротору гидродвигателя 9, 0 - коэффициент линейного сопротивления вращению гидродвигателя 9;
-радиусы рулона 1 и тянущего цилиндра 2, м;
F - натяжение разматываемого материала, Н;
N - нагружающее усилие от пнев- моцилиндра, приведенное к оси движения амортизатора, Н;
возмущающий момент на оси рулона, Н;
Z - перемещение оси амортизатора (регулируемый параметр в системе), м;
безразмерный параметр управления гидронасосом; передаточная функция ре1 уля-- тора;
постоянная времени электрогидравлического усилителя, с; коэффициенты передачи электронного и электрогидравлического усилителей; -- привода регулирующей ajart- бы и местной обратной связи; - потенциометра и тахогенера- тора;
-задающее напряжения, В. Приведенное математическое описание
позволяет провести анализ устойчивости и качества регулирования процесса регулиМ/ е -
Wper
Тэгу - КУ, Ksry -
К , Ко-с
Кп, к.
и.
рования натяжения длинномерного материала.
Формула изобретения
1. Устройство для регулирования натяжения длинномерного материала, содержащее разматываемый рулон с гидродвигателем, соединенным посредством гидролиний с гидронасосом, амортизационный валик, кинематически связанный с нагружающим механизмом, тянущие цилиндры с приводом и регулятор частоты вращения гидродвигателя, вход которого связан с осью качания амортизационного валика, отличающееся тем, что, с целью повыщения точности регулирования за счет стабилизации в момент разгона и торможения, гидролинии между гидродвигателем и гидронасосом выполнены в виде замкнутой системы циркуляции жидкости, снабженной регулирующей
10
15
2. Устройство по п. 1, отличающееся тем, что регулятор частоты вращения гидродвигателя включает потенциометры, тахогене- ратор, последовательно соединенные электронный и электрогидравлический усилители и задатчик исходного положения амортизационного валика, причем первый потенциометр и тахогенератор кинематически связан с осью качания амортизационного валика, выходы потенциометров, тахогенера- тора и задатчика исходного положения амортизационного валика соединены с входом электронного усилителя, а выход электрогидравлического усилителя подключен к входу гидропривода регулирующей щайбы гидронасоса, выходом подключенного к входу второго потенциометра.
3. Устройство по п. 1, отличающееся тем, что нагружающий механизм выполнен в виде пневмоцилиндра, порщень которого кинемащайбой гидронасоса с гидроприводом, гид- 20 тически связан с амортизационным ва ли- ронасос связан с тянущими цилиндрами, аком, причем полость цилиндра, обращенная
выход регулятора частоты вращения гидро-к амортизационному валику, связана с атмодвигателя подключен к входу гидроприводасферой, а другая полость - с источником
регулирующей щайбы гидронасоса.сжатого воздуха.
2. Устройство по п. 1, отличающееся тем, что регулятор частоты вращения гидродвигателя включает потенциометры, тахогене- ратор, последовательно соединенные электронный и электрогидравлический усилители и задатчик исходного положения амортизационного валика, причем первый потенциометр и тахогенератор кинематически связан с осью качания амортизационного валика, выходы потенциометров, тахогенера- тора и задатчика исходного положения амортизационного валика соединены с входом электронного усилителя, а выход электрогидравлического усилителя подключен к входу гидропривода регулирующей щайбы гидронасоса, выходом подключенного к входу второго потенциометра.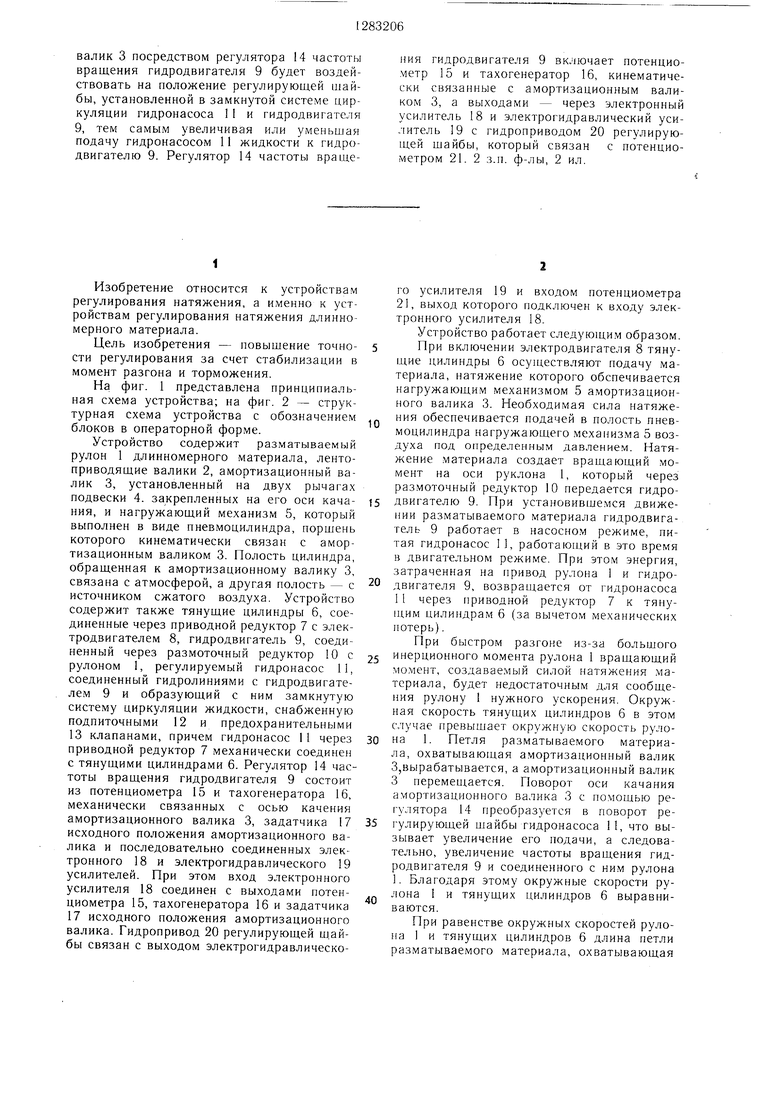


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения длинномерного материала | 1988 |
|
SU1646974A1 |
| Устройство для регулирования натяжения ленточного материала | 1984 |
|
SU1359237A1 |
| Устройство для размотки рулонного материала | 1979 |
|
SU903267A1 |
| Электрогидравлический привод подачи деревообрабатывающего станка | 1984 |
|
SU1166991A1 |
| Устройство для регулирования натяжения полотна | 1990 |
|
SU1742194A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Устройство для автоматического регулирования натяжения длинномерного материала | 1977 |
|
SU719932A1 |
| Автоматическая кромкоправка | 1985 |
|
SU1326523A1 |
| Регулятор натяжения | 1975 |
|
SU507507A1 |
| Непрерывный агрегат для производства узких полос | 1978 |
|
SU948018A1 |
Изобретение используется для регулирования натяжения длинномерного материала. Цель изобретения - повышение точности регулирования за счет стабилизации в момент разгона и тор.можения. При включении электродвигателя 8 тянущие цилиндры 6 осуилествляют подачу материала, натяжение которого обеспечивается нагружающим механизмом 5, выполненным в виде пневмоцилиндра и связанным с амортизационным валиком 3. Гидродвигатель 9 кинематически связан с рулоном 1, а гидронасос 11 - с тянущими цилиндрами 6. При равенстве окружных скоростей рулона 1 и тянущих цилиндров 6 длина петли разматываемого материала, охватыающая амортизационный валик 3, остается постоянной. При неравенстве окружных скоростей длина петли начинает изменяться, и амортизационный дда /5 (Л f ю 00 со 1чЭ О О5 Лг
Составитель Б. Бы.ховский
Редактор И. КасардаТехред И. ВересКорректор .М.. Максимишинец
Заказ 7360/20Тираж 590Подписное
ВНИИПИ Государственного комитета СССР по де.лам изобретений и открытий
1 13035, Москва, , Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Толстой Г | |||
| Д | |||
| Автоматизация полиграфических производственных процессов, М., 1970, с | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
