Изобретение относится к грузоподъемным устройствам и может быть использовано при проведении погрузочно-разгрузочных операций с предметами различной формы, в частности с кипами, бочками, контейнерами.
Цель изобретения - улучшение условий эксплуатации путем обеспечения автоматического захвата груза и исключение его раскачивания.
захвата 6 сначала упираются в груз 9, а при дальнейшем движении погрузчика 1 расходятся, преодолевая усилие пружины 8, и плотно охватывают груз 9. Затем каретка 3 со стрелой 4 поднимается по грузоподъемнику 2, при этом рычаги захвата 6 еще сильнее зажимают груз 9, и последний перемещается к месту установки, а планки 7 препятствуют его раскачиванию.
Для освобождения груза 9 его устанав, -., f- иглл Ik/V-JCl tikJ VV IdilcltD
На фиг. 1 показано устройство, ВИД сбоку; 10 ливают па твердую пове рхность, з ахват 6 на фиг. 2 - вид, А на фиг. 1; на фиг. 3 - опускается, ослабляя усилие зажима, .ходом
узел I на погрузчика 1 назад преодолевается натяжение пружины 8, и груз 9 освобождается.
вид Б на фиг. 1; на фиг. 4 фиг. 3.
Захватное устройство к погрузчику 1 содержит смонтированную на перемещающейся по грузоподъемнику 2 каретке 3
Формула изобретения
стрелу 4, подвешенную к последней серь-1. Захватное устройство погрузчика
гу 5, несущую клещевой .захват 6, располо- содержащее подвешенный к смонтированной женный в плоскости, перпендикулярной оси на каретке последнего стреле в плоскости стрелы 4, и две планки 7, смонтированные перпендикулярной его продольной оси параллельно указанной оси и соединенные 20 клещевой захват с самозажимными рыча- посредством универсальных шарниров од- гами, отличающееся тем, что, с целью улучшения условий эксплуатации путем обеспечения автоматического захвата груза и исключения его раскачивания, оно снабжено
пружина 8, длина которой может регулиро- парой расположенных перпепдикулярпо за- ваться в зависимости от размеров груза 9, хвату планок, одни концы кот орых соединены универсальными шарнирами с указанными рычагами, а другие - с кареткой, пружиной растяжения, соединенной
- II- j-...... -f.. концами с планками, и упором для ограВ исходном положении расстояние меж- зо ничепия сближения последних, ду рычагами захвата 6 устанавливается2. Устройство по п. 1, отличающееся
несколько меньшим, чем размер груза 9, тем, что пружина и упор смонтированы с путем подбора длин пружины В и упора 10. возможностью регулировки их длин для Погрузчик 1 подходит к грузу 9, рычаги работы с грузами различных размеров
ними концами с самозажимными рычагами захвата 6, а другими с кареткой 3. Между планками 7 смонтированы стягивающая их
и регулируемый упор 10, ограничивающий сближение планок 7.
Устройство работает следующим образом.
В ид А
Видб
Фиг. 2
захвата 6 сначала упираются в груз 9, а при дальнейшем движении погрузчика 1 расходятся, преодолевая усилие пружины 8, и плотно охватывают груз 9. Затем каретка 3 со стрелой 4 поднимается по грузоподъемнику 2, при этом рычаги захвата 6 еще сильнее зажимают груз 9, и последний перемещается к месту установки, а планки 7 препятствуют его раскачиванию.
Для освобождения груза 9 его устанав, -., f- иглл Ik/V-JCl tikJ VV IdilcltD
ливают па твердую пове рхность, з ахват 6 опускается, ослабляя усилие зажима, .ходом
Формула изобретения
что пруж ожностью ы с гр
Видб
I
VU2.
Составитель в. Момот
Редактор А. ГулькоТехред И. tiepecКорректор М. Пожо
Заказ 7361/20Тираж 719Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская иаб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектяая 4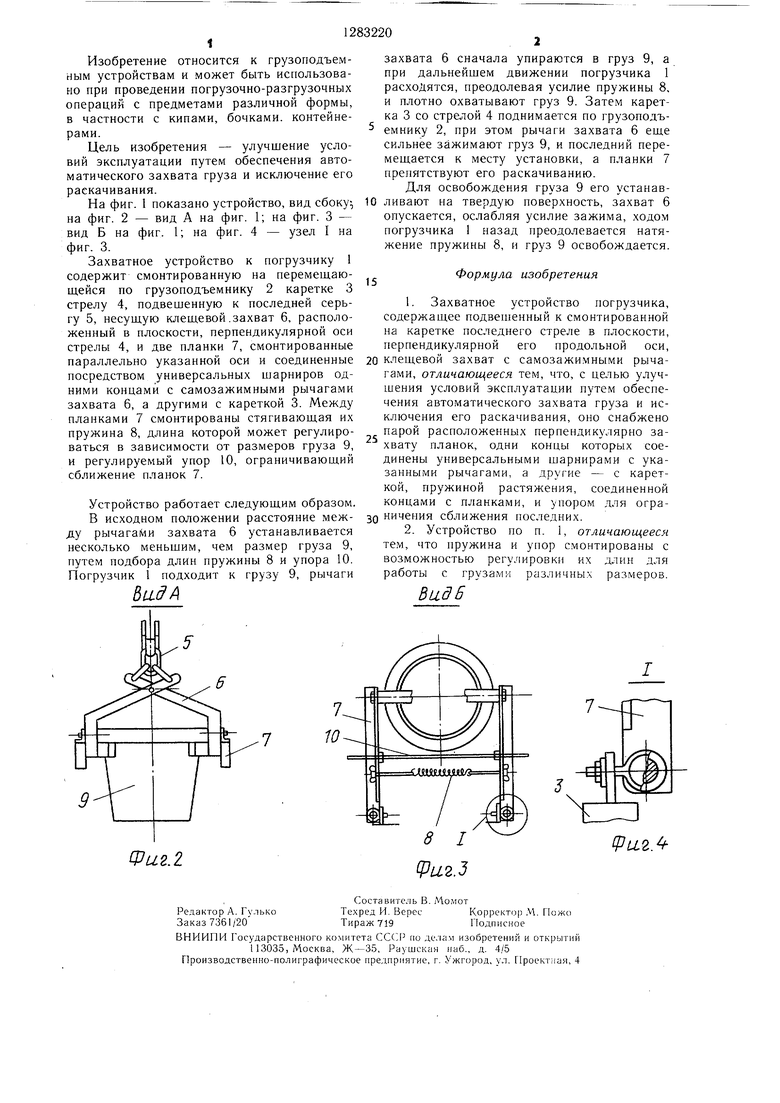
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство погрузчика | 1990 |
|
SU1759789A1 |
| Шарнирно-сочлененная стрела грузоподъемного механизма | 1982 |
|
SU1054287A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011636C1 |
| Захватное устройство к погрузчику | 1978 |
|
SU749798A1 |
| Автооператор | 1988 |
|
SU1616800A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО К ВИЛОЧНОМУ ПОГРУЗЧИКУ | 1971 |
|
SU312825A1 |
| Грузоподъемник погрузчика | 1985 |
|
SU1296507A1 |
| Погрузчик | 1986 |
|
SU1401007A1 |
| Устройство для захвата и транспортирования пакета кирпичей | 1973 |
|
SU515719A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО К ПОГРУЗЧИКУ ДЛЯ ПАКЕТАКИРПИЧА | 1969 |
|
SU234225A1 |
Захватное устройство ногрузчика предназначено для погрузочно-разгрузочных работ с кипами, бочками, контейнерами. Цель изобретения - улучшение условий эксплуатации путем обеспечения автоматического захвата груза и исключения его расчаливания. В исходном положении расстояние между рычагами захвата 6 устанавливается несколько меньшим, чем размер груза 9 путем подбора длин пружины 8 и упора 10. Погрузчик 1 подходит к грузу 9, рычаги захвата 6 сначала упираются в груз 9, а при дальнейшем движении погрузчика 1 расходятся, преодолевая усилие пружины 8, и плотно охватывают груз 9. Затем каретка 3 со стрелой 4 поднимается, рычаги захвата 6 еш,е сильнее зажимают груз 9, и последний перемешается к месту установки, а планки 7 препятствуют его раскачиванию. Для освобождения груза 9 его устанавливают на твердую поверхность, захват 6 опускается, ослабляя усилие зажима, ходом погрузчика 1 назад преодолевается натяжение пружины 8, и груз 9 освобождается. 1 3. п. ф-лы, 4 ил. (Q 1(Л ГчЭ 00 со N3 U2.1 ,..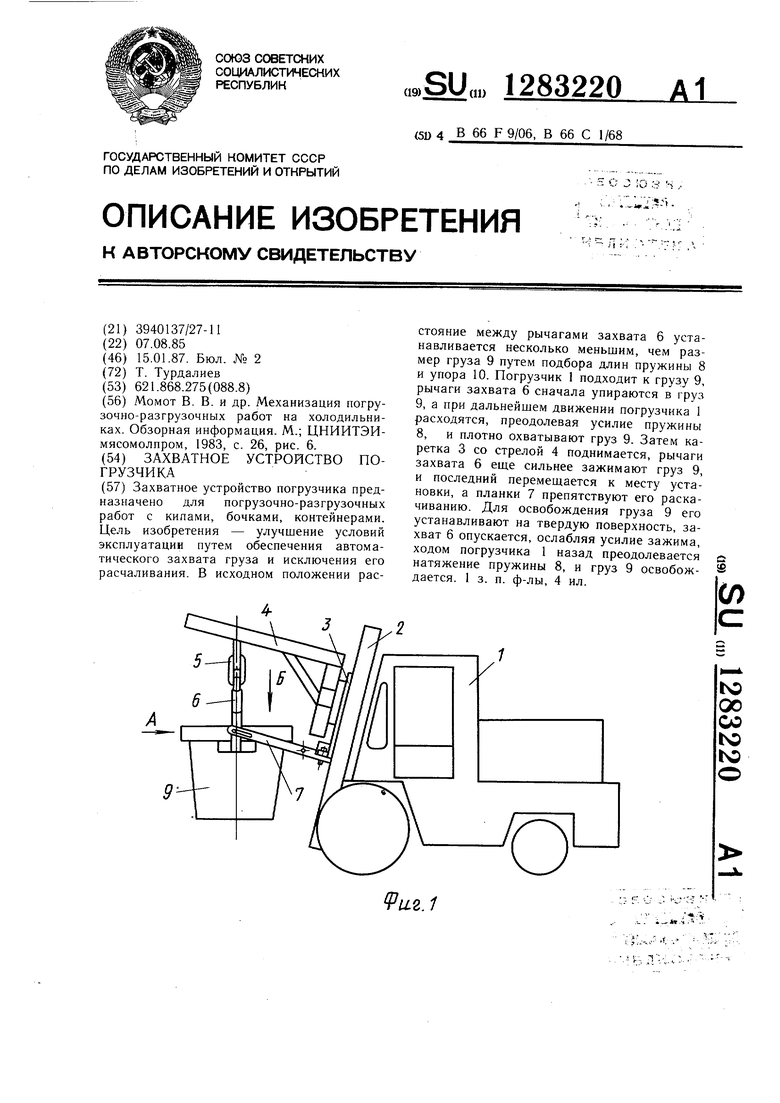
| Момот В | |||
| В | |||
| и др | |||
| Механизация погру- зочно-разгрузочных работ на холодильниках | |||
| Обзорная информация | |||
| М.; ЦНИИТЭИ- мясомолпром, 1983, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
