1
Изобретение относится к области подъемнотранспортного машиностроения.
Известны устройства для захвата и транспортирования пакета кирпичей, уложенного на опорные кирпичи, содержащие навешенную, например, на раму автопогрузчика каретку с приводом зажима и полыми лапами, внутри которых шарнирно укреплены рычаги с поворотными прижимными планками.
Недостатками известных устройств являются сдвиг опорных кирпичей от первоначального положения при захвате, а также затрудненный вывод лап из каналов пакета.
Целью изобретения является повышение надежности захвата опорных кирпичей.
Это достигается тем, что рычаги выполнены с упором у основания и смонтированы в полой лапе попарно, а между ними установлен приводной вал с укрепленными на нем кулачками, взаимодействующими с упорами, и свободно надетыми на него пружинами кручения, которые своими концами упираются в рычаги.
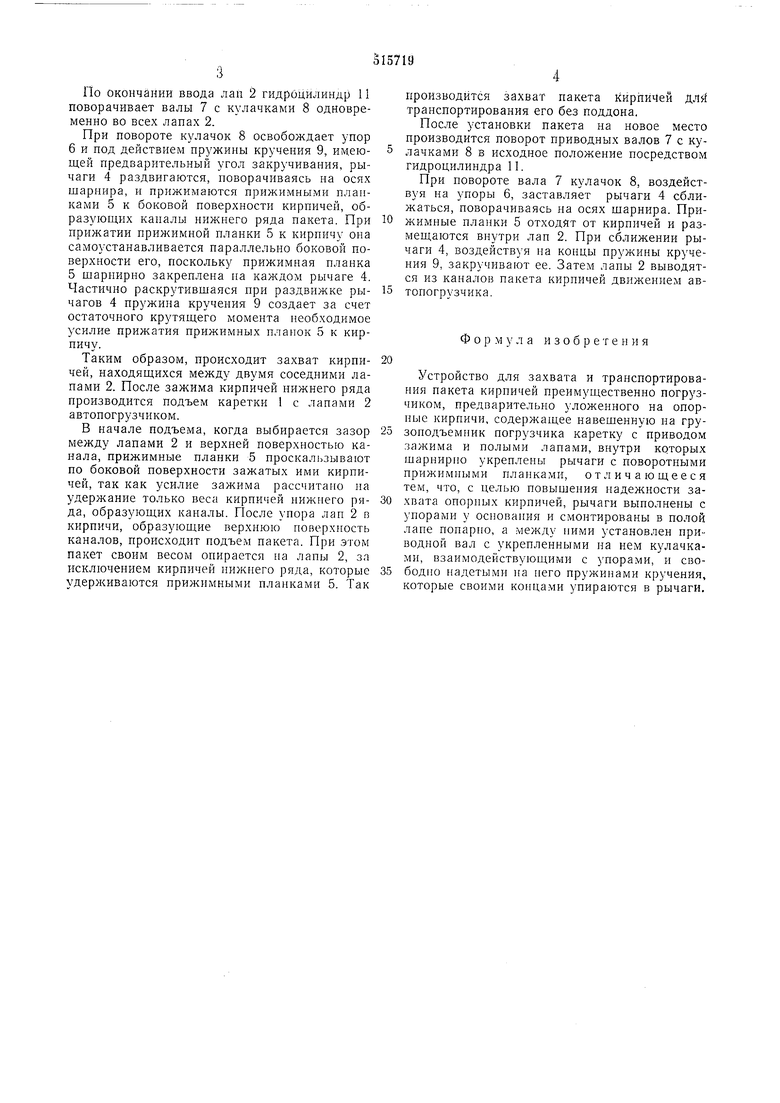
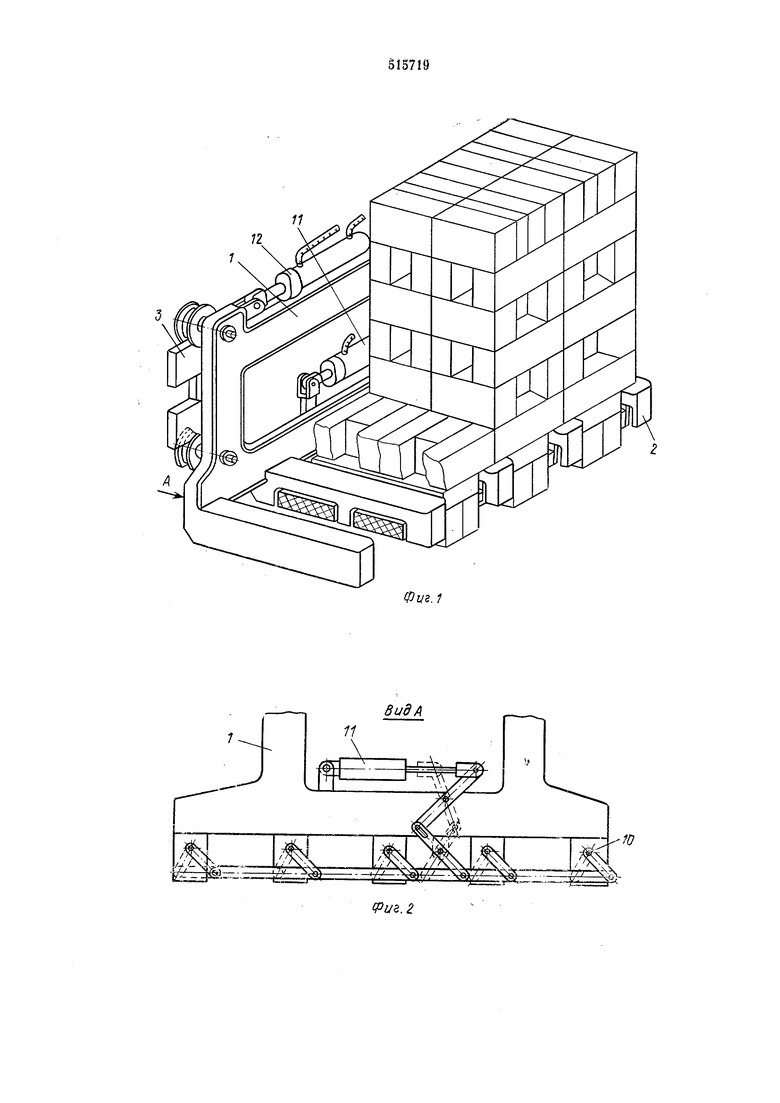
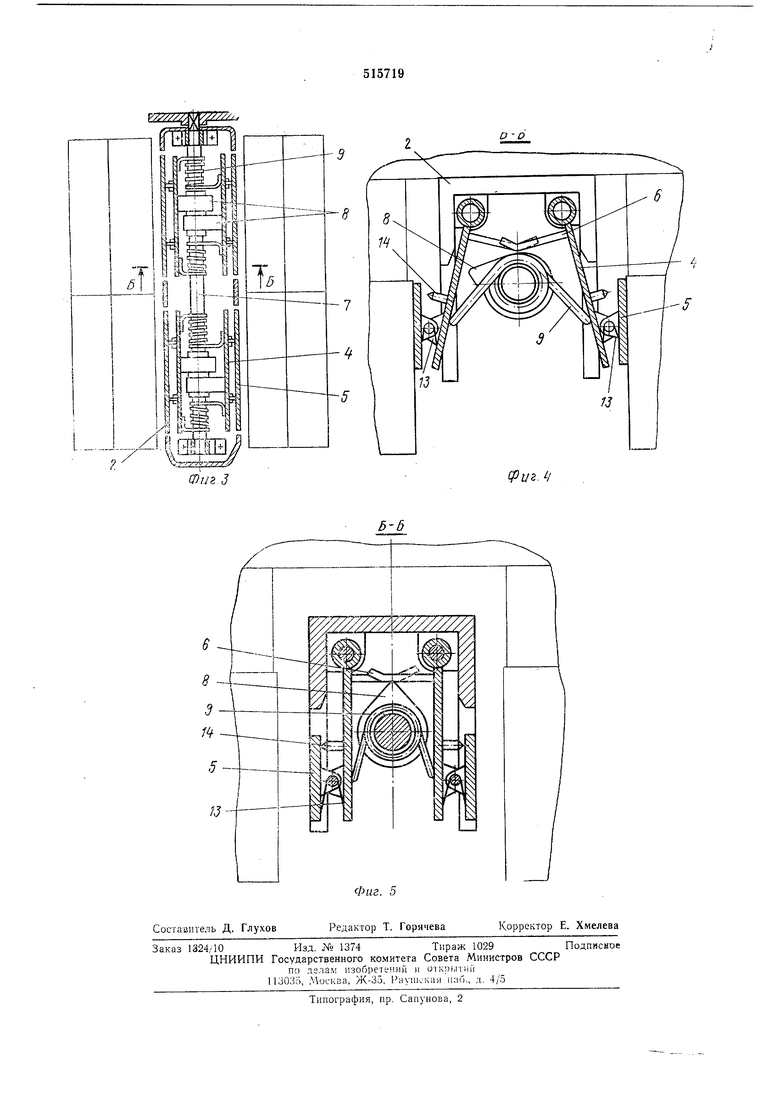
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - одна из средних лап, разрез в горизонтальной плоскости; на фиг. 4 - разрез по Б-Б на фиг. 2, в рабочем положении; на фиг. 5 - то же, в нерабочем положении.
Устройство содержит каретку 1 с полыми лапами 2, навешенную на грузоподъемник 3, например, автопогрузчика. Внутри полых лап 2 шарнирно укреплены рычаги 4 с поворотными прижимными планками 5. Рычаги 4 попарно смонтированы в каждой полой лапе 2 и выполнены с упорами 6 у их основания, причем между рычагами 4 установлен приводной вал 7 с укрепленными на нем кулачками 8, взанмодействующими с упорами 6, и свободно надетыми на него пружинами кручения 9, которые своими концами упираются в рычаги 4.
Приводные валы 7 связаны общей системой рычагов 10 с гидроцилиндром 11. Каретка 1 с полыми лапами 2 перемещается по раме посредством гндроцилиндра 12. При сдвинутых рычагах 4 прижимная планка 5 располагается внутри лап 2 и при этом фиксируется пружиной 13 и ограничителем 14.
Устройство работает следующим образом. Автопогрузчик полТ,ъезжает к пакету кирпичей и лапами 2 входит в каналы, находящиеся в нижнем ряду пакета.
В случае необходимости положение лап 2 корректируется перемещением каретки 1 по грузоподъемнику 3 посредством гидроцилиндра 12.
Во время ввода рычаги 4 находятся в слвинутом положении (см. фиг. 5).
По окончании ввода лап 2 гидроцилиндр 11 поворачивает валы 7 с кулачками 8 одновременно во всех лапах 2.
При повороте кулачок 8 освобождает упор 6 и под действием пружины кручения 9, имеющей предварительный угол закручивания, рычаги 4 раздвигаются, поворачиваясь на осях шарнира, и прижимаются прижимными планками 5 к боковой поверхности кирпичей, образующих каналы нижнего ряда пакета. При прижатии прижимной планки 5 к кирпичу она самоустаиавливается параллельно боковой поверхности его, поскольку прижимная планка 5 шарнирно закреплена на каждом рычаге 4. Частично раскрутивщаяся при раздвижке рычагов 4 пружина кручения 9 создает за счет остаточного крутящего момента необходимое усилие прижатия прижимных планок 5 к кирпичу.
Таким образом, происходит захват кирпичей, находящихся между двумя соседними лапами 2. После зажима кирпичей нижнего ряда производится подъем каретки 1 с лапами 2 автопогрузчиком.
В начале подъема, когда выбирается зазор между лапами 2 и верхней поверхностью канала, прижимные плапки 5 проскальзывают по боковой поверхности зажатых ими кирпичей, так как усилие зажима рассчитано на удержание только веса кирпичей нижнего ряда, образующих каналы. После упора лап 2 п кирпичи, образующие верхнюю поверхиость каналов, происходит подъем пакета. При этом пакет своим весом опирается на лапы 2, зл исключением кирпичей нижнего ряда, которые удерживаются прижимными планками 5. Так
производится захват пакета 1 ирпичей длй транспортирования его без поддона.
После установки пакета па новое место производится поворот приводных валов 7 с кулачками 8 в исходное положение посредством гидроцилиндра 11.
При повороте вала 7 кулачок 8, воздействуя на упоры 6, заставляет рычаги 4 сближаться, поворачиваясь па осях шарнира. Прижимные планки 5 отходят от кирпичей и размещаются внутри лап 2. При сближении рычаги 4, воздействуя на концы пружины кручения 9, закручивают ее. Затем лапы 2 выводятся из каналов пакета кирпичей движением автопогрузчика.
Формула изобретения
Устройство для захвата и транспортирования пакета кирпичей преимущественно погрузчиком, предварительно уложенного на опорные кирпичи, содержащее навещенную на грузонодъемник погрузчика каретку с приводом зажима и полыми лапами, внутри которых шарнирно укреплены рычаги с поворотными прижимными планками, отличающееся тем, что, с целью повышения надежности захвата опорных кирпичей, рычаги выполнены с упорами у основания н смонтированы в полой лапе попарно, а между ними установлен приводной вал с укрепленными на нем кулачками, взаимодействующими с упорами, и свободно надетыми на пего пружинами кручения, которые своими концами упираются в рычаги.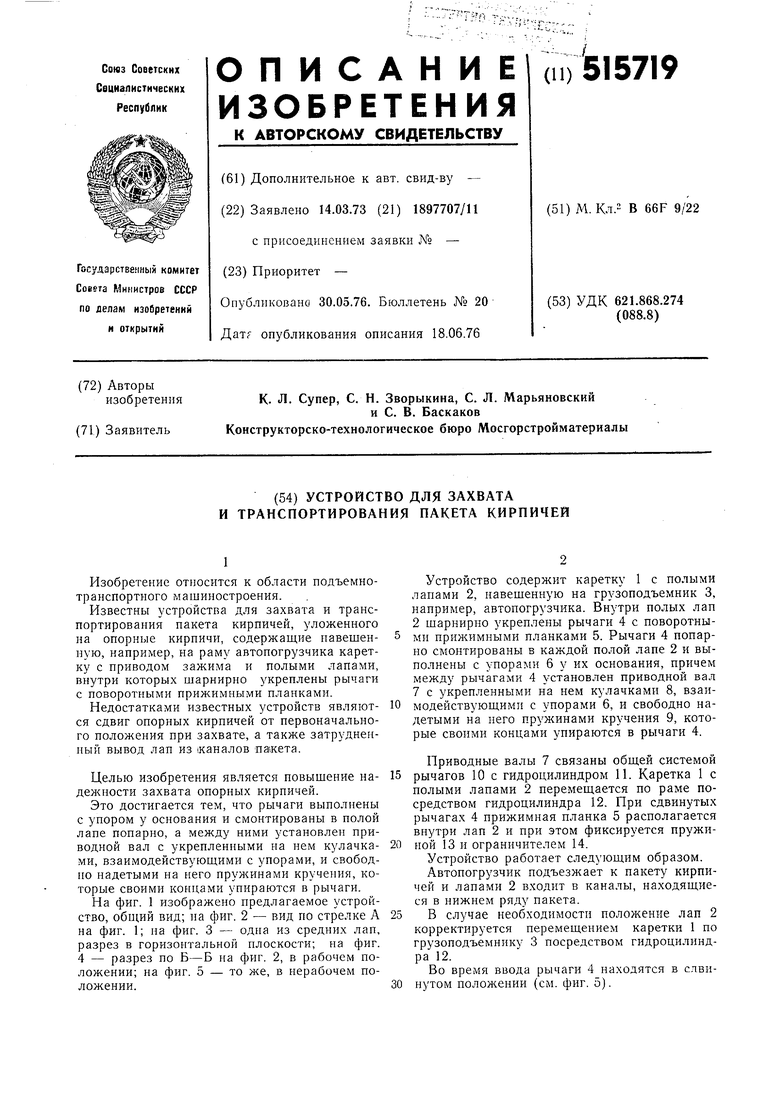
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО К АВТОПОГРУЗЧИКУ ДЛЯ ЗАХВАТА И ТРАНСПОРТИРОВАНИЯ ПАКЕТА КИРПИЧЕЙ | 1969 |
|
SU242740A1 |
| Устройство для захвата и транспортирования пакета кирпичей погрузчиком | 1985 |
|
SU1298187A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО К ПОГРУЗЧИКУ ДЛЯ ПАКЕТАКИРПИЧА | 1969 |
|
SU234225A1 |
| ВИЛОЧНЫЙ ЗАХВАТ ДЛЯ АВТОПОГРУЗЧИКА | 1970 |
|
SU267471A1 |
| Стенд для испытания грузозахватных приспособлений | 1978 |
|
SU711413A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| СТЕНД ДЛЯ СБОРКИ И ДВУСТОРОННЕЙ СВАРКН ЛИСТОВОГО МАТЕРИАЛА В ПОЛОТНИЩА | 1973 |
|
SU366951A1 |
| АВТОПОГРУЗЧИК | 1967 |
|
SU190269A1 |
| Захватное устройство для пакетированных грузов | 1984 |
|
SU1229163A1 |
| Захватное устройство для бесподдонных пакетов кирпича | 1979 |
|
SU895882A1 |
Вид А
Риг.2
