1128351
Изобретение относится к техничесим измерениям в машиностроении и ожет быть использовано для автомати- еского контроля изделий сложной ормы.5
Целью изобретения является упро- ение конструкции и повышение точное-: ти измерения за счет наличия только одного подвижного звена.
На чертеже представлен измеритель- ный робот, общий вид.
Измерительный робот - содержит два поступательных привода, состоящих из двигателей 1 и 2 и выходных звеньев 3 и 4, рычаг 5, подвешенный на шар- 5 нире к выходному звену 3 и связанный одним из плеч конец которого выполнен в виде упора 6 с торцом 7 выходного звена Аjизмерительную головку 8, расположеннзпо на свободном 20 конце второго плеча рычага 5, измерительные преобразователи 9 и 10 перемещения выходных звеньев 3 и 4 узел для дополнительного перемещения измерительной головки 8 и изде ЛИЯ 11, выполненный в виде поворотного стола 12, Линия, соединяющая точки взаимодействия выходных звеньев 3 и 4 приводов с рычагом 5, непараллельна направлениям перемещения выходных звеньев приводов. Направления перемещения выходных звеньев приводов взаимно параллельны, а плечи рычага 5 выпо/1нень взаимно пер- пендикулярньми. Измерительная голов- 35 ка 8 имеет наконечник 13,
Измерительный робот работает следующим образом.
На стол 12 устанавливают контролируемое изделие 1I, Наконечник 13 измерительной головки 8 перемещают в плоскости, перпендикулярной плоскости вращения стола 12, и вво,- 25
30
40
дят в соприкосновение с поверхностью изделия I, Сочетая перемещения выходных звеньев 3 и 4 приводов, управляемых от ЭВМ (не показана), перемещают наконечник 13 измерительной головки 8 в требуемую точку в плос- КОС7И измерения, перпендикулярной плоскости вращения стола, и контролируют профиль изделия I1, регистрируя показания преобразователей 9 и 1 Oi
Формула изобретения
1,Измерительный робот, содержащий два поступательных привода, рычаг, подвешенньй на шарнире к выходному звену одного из приводов и связанный с одним из плеч с выход- шлм звеном второго привода, измерительную головку, расположенную на , свободном конце второго плеча рычага, измерительные преобразователи перемещения выходных звеньев привода
и узлы для дополнительного относительного перемещения измерительной головки и изделия, отличающийся тем, что, с целью упрощения конструкции и повышения точности измерения, конец первого плеча рычага выполнен в виде упора, контактирующего с торцом выходного звена второго привода, а линия, соединяющая точки взаимодействия выходных звеньев приводов с рычагом, непараллельна направлениям перемещения выходных звеньев приводов,
2,Робот поп,}, отличаю- щ и и с я тем, «то направления перемещения выходных звеньев приводов взаимно параллельны,
3,Робот по п,, отличающий с я тем, что плечи рычага выполнены взаимно перпендикулярными.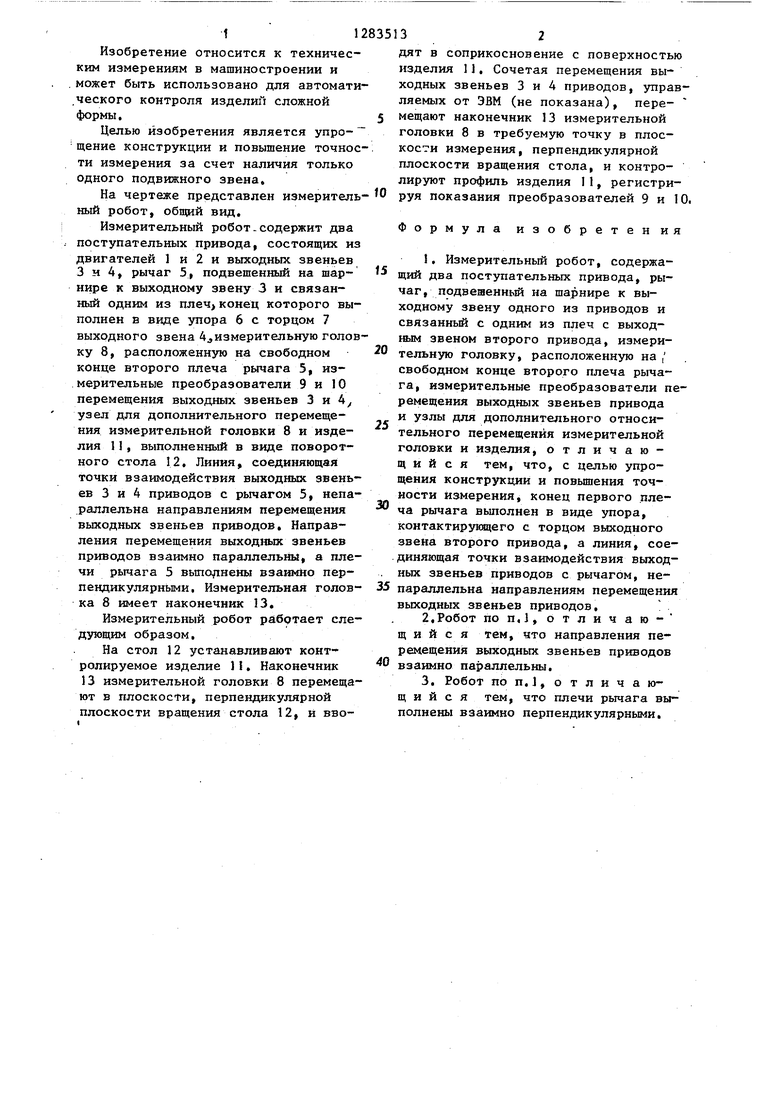
| название | год | авторы | номер документа |
|---|---|---|---|
| Координатная измерительная машина | 1983 |
|
SU1226004A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2009881C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА | 1990 |
|
RU2009882C1 |
| Устройство для измерения диаметра отверстия | 1990 |
|
SU1763861A1 |
| Устройство для поэлементного контроля зубчатых колес | 1980 |
|
SU1242705A1 |
| Измерительный робот | 1986 |
|
SU1415024A1 |
| Измерительный робот | 1984 |
|
SU1359639A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ СБОРКИ ТВЭЛ ДЛЯ ЭНЕРГЕТИЧЕСКИХ ЯДЕРНЫХ РЕАКТОРОВ ТИПА БН | 1994 |
|
RU2094866C1 |
| Способ определения параметров трубопроводов пространственной конфигурации | 1985 |
|
SU1271612A1 |
| СПОСОБ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ВКЛАДЫШЕЙ ПОДШИПНИКОВ | 2003 |
|
RU2245230C2 |

Изобретение относится к техническим измерениям в машиностроении и может быть использовано для автоматического контроля сложной формы. Целью изобретения является упроще- иие конструкции и повышение точности измерения. Измерительный робот содержит два поступательных привода с измерительными преобразователями перемещения выходных звеньев приводов. К выходному звену одного привода подвешен на шарнире рычаг, конец из плеч которого выполнен в виде упора, контактирующего с торцом выходного звена второго привода, а на конце второго плеча установлена измерительная головка, наконечник которой вводится в контакт с поверхностью контролируемого изделия, установленного на поворотном столе робота. Для введения наконечника в контакт с изделием производится сочетание перемещений выходных звеньев приводов, управляемых от ЭВМ. При перемещении наконечника измерительной головки по профилю изделия регистрируются показания измерительных преобразователей перемещений выходных звеньев приводов. Выходные звенья приводов могут быть выполнены взаимно параллельными, а плечи рычага взаимно перпендикулярными. 2 з.п. ф-лы. 1 ил. i (Л 00 &0 СП
/
Составит ь М.Кириллов Редактор Н.Слободяник Техред:В.Кадар
Заказ 7421/35 Тираж 677. Подписное
ВНИИПИ Государстйенного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д,4/5
Производственно-полиграфическое предприятие, г.Ужгород, yrt.Проектная,4
Корректор С.Черни ,
