вого и с второго выходов датчика положения, установленного на ведомом валу, поступают в зависимости от направления вращения вала на четвертые входы первого либо второго элементов 2-2И-ИПИ 9, 10, Сигнал с первого выхода задатчика 1 поступае на информационный вход разностного счетчика 3 и на R-вход RS-триггера 8, а сигнал с третьего выхода датчика 7 поступает на S-вход RS-триггера 8. Выходной сигнал RS-триггера 8 поступает на третьи входы обоих элементов 2-2И-ИЛИ 9, 10. Сигналы с первогь и второго выходов дешифратора 11 поступают на первые
t
Изобретение относится к тельной технике и может найти применение в установках, в которых требуется синфазное и синхронное вращение ведущего и ведомого валов, которые разнесены на расстояние, при котором имеет существенное значение количество соединительных проводов между блоками привода.
Целью изобретения является повышение точности привода,
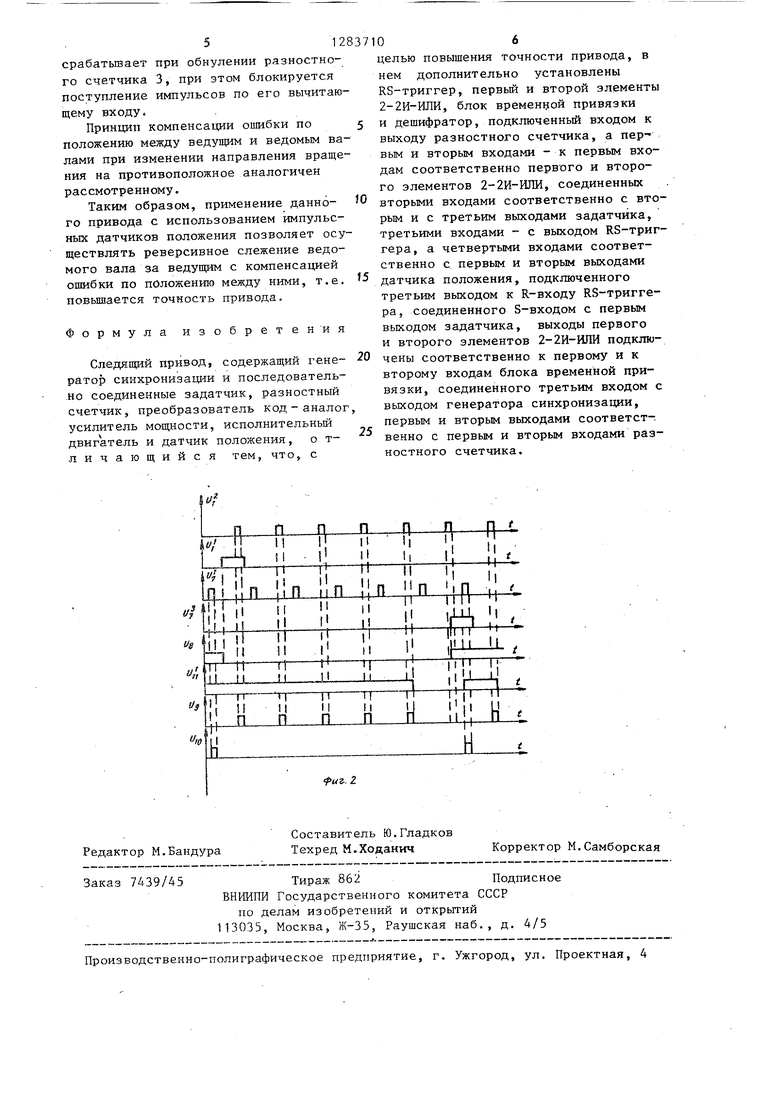
На фиг, 1 изображена блок-схема предлагаемого привода , на фиг, 2 - временные диаграммы, поясняющие работу устройства.
Следящий привод содержит датчик 1 блок 2 временной привязки, разностный счетчик 3, преобразователь 4 код - аналог, усилитель мощности 5, исполнительный двигатель 6, датчик 7 положения, RS-триггер 8, первый и второй элементы 2-2И-ИЛИ 9, 10, дешифратор 11, генератор 12 синхронизации.
и- -| сигнал на i-м выходе j-ro блока; Uj - выходной сигнал j-ro блока.
Привод работает следующим образом
Сигналы с второго и третьего выходов задатчика 1 угловых перемещений, установленного на ведущем (задающем) валу, в виде число-импульсной последовательности в зависимости от направления угловых перемещений ведущего вала поступают на вторые
входы первого н второго элементов 2-2И-ИЛИ 9, 10, А их выходные сигналы поступают на первый и второй входы блока 2 временной привязки, на третий вход которого поступает выходной сигнал генератора 12 синхронизации. Выходные сигналы блока 2 временной привязки поступают на управляющие входы разностного счетчика 3, Его выходной сигнал поступает на входы дешифратора 11 и преобразователя 4 код - аналог. Выходной сигнал последнего усиливается по мощности 11 воздействует на электрдвигатель 6, вызывая перемещение ведомого вала, 2 ил.
входы первого 9 либо второго 10 элементов 2-2И-ИЛИ. А импульсы с первого и с второго выходов датчика 7 положения, установленного на ведомом
(следящем) валу, поступают в зависимости от направления вращения вала исполнительного двигателя 6 на четвертые входы первого 9 либо второго 10 элементов 2-2И-ИЛИ,
Исходное состояние разностного счетчика 3, когда в старшем разряде записана логическая 1, а в остальных логический О, устанавливается при включении привода и подтверждается это состояние установочным импульсом с первого выхода задатчика 1 угловых перемещений один раз за оборот ведущего вала. Это состояние разностного счетчика 3 соответствует нулевому значению сигнала рассогласования на выходе преобразователя 4 код - аналог.
При поступлении импульсов сложение с первого выхода задатчика 1 угловых перемещений через первый
элемент 2-2И-ИЛИ 9 и блок 2 временной привязки на суммирующий вход разностного счетчика 3 на выходе преобразователя 4- код - аналог появляется аналоговый сигнал рассогласования, ко- торьш после усиления в усилителе мощности 5.используется для управления исполнительным двигателем 6, Под действием управляющего напряжения исполнительный двигатель 6 приходит
31
во вращение. Каждому элементарному шагу перемещения ведомого вала соответствует один импульс на первом ил втором выходах датчика 7 угловых перемещений, которые, поступая чере первый элемент 2-2ИЛИ-ИЛИ 9 и блок временной привязки на вычитающий вход разностного счетчика 3, стремятся свести аналоговый сигнал рассогласования на выходе преобразователя 4 код - аналог- к нулю.
При поступлении импульсов вьР- читание (ведущий вал изменил напраление вращения) с второго выхода задатчика 1 угловых перемещений через второй элемент 2-2И-ИЛИ 10 и блок 2 временной привязки на вычитающий вход разностного счетчика 3 на выходе преобразователя , 4 код - ана лог появляется аналоговьй сигнал рассогласования противоположной полярности, кот.орый, усиливаясь в усилителе мощности 5, заставляет вращаться исполнительный двигатель в обратную сторону. Таким образом осуществляется реверсивное слежение ведомого вала за ведущим.
Блок 2 временной привязкой осуществляет привязку входных им- пульсов к частоте импульсов синхронизации, поступающих с входа генератора 12 синхронизации, таким образом, что одновременное присутствие импульсов на суммирующем и вычитаю- щем входах разностного счетчика 3 исключено.
Так как в качестве сумматора входных и выходных последовательностей импульсов применен разностный счетчик 3, то в следящем приводе осуществляется непрерывная регистрация и компенсация фазового сдвига между ведущим и ведомым валами.
Рассмотрим принцип компенсации ошибки по положению между ведущим и ведомым валами при условии, что они вращаются в одну сторону.
В целях компенсации ошибки по положению (обеспечения согласованного вращения валов) используются установочные импульсы Uj с первого выхода задатчика 1 и импульсы U с третьего выхода датчика 7 положения которые, воздействуют на RS-триггер 8 изменяют его состояние. С приходом установочного импульса U с первого выхода задатчика 1 угловых перемещений на S-Бход RS-триггера 8 он уста10
нав.гтивается в единртчное состояние (см. фнг. -2) .
На выходе RS-триггера 8 формируется потенциал низкого уровня, которьй воздействуя на третьи входы первого 9 и второго 10 элементов 2-2И-ИЛИ, запрещает проход импульсов отработки с датчика 7 положения на вход разностного счетчика 3. Это приводит к тому, что с каждым приходящим импульсом с первого выхода задатчика 1 угловых перемещений содержимое разностного счетчика 3 увеличивается (см. фиг. 2). .
Одновременно с этим на вход исполнительного двигателя 6 через преобразователь 4 код - аналог и усили- тель мощности 5 будет поступать дополнительное регулирующее воздействие, пропорциональное значению кода рассогласования на выходе разностного счетчика 3, в результате чего ведомый вал будет плавно доворачи- вать, компенсируя ошибку по положени между ведущим валом.
По приходу установочного импульса |с третьего выхода датчика 7 положения на R-вход RS-триггера 8 он возвращается в нулевое состояние, разрешая проход импульсов отработки через элементы 9 и 10 2-2И-ЕПИ (в зависимости от направления перемещения) на вход разностного счетчика (см. фиг. 2).
Таким образом, за время действия импульса низкого уровня с выхода RS-триггера 8 осуществляется компенсация ошибки по положению между валами.
С помощью дешифратора 11, соединенного выходами с первыми входами первого 9 и второго 10 элементов 2-2И-ИЛИ, обеспечивается линейный режим работы разностного счетчика 3, который определяется его емкостью.
При полном заполнении разностного счетчика 3, что имеет место при больших величинах рассогласований, срабатывает дешифратор 11 и своим низким потенциалом на выходе блокирует поступление импульсов через первый элемент 2-2И-ИЛИ 9 на суммирующий вход разностного счетчика 3 (см. фиг. 2). Этот процесс продолжается до тех пор пока разностный счетчик 3 не войдет в линейный режим за счет поступления импульсов на его вычитающий вход. Аналогичным образом дешифратор 11
срабатьшает при обнулении разностного счетчика 3, при этом блокируется поступление импульсов по его вычитающему входу.
Принцип компенсации ошибки по положению между ведущим и ведомь м валами при изменении направления вращения на противоположное аналогичен рассмотренному.
Таким образом, применение данного привода с использованием импульсных датчиков положения позволяет осуществлять реверсивное слежение ведомого вала за с компенсацией ошибки по положению между ними, т.е. повышается точность привода.
Формула изобретения
Следящий привод, содержащий генератор синхронизации и последователь- .но соединенные задатчик, разностный счетчик, преобразователь код-аналог, усилитель мощности, исполнительньш двигатель и датчик положения, о т- личающийся тем, что, с
Редактор М.Бандура
Составитель Ю.Гладков Техред М.Ходанич
Заказ 7439/45
Тираж 862Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
5
0
5
целью повышения точности привода, в нем дополнительно установлены RS-триггер, первьм и второй элементы 2-2И-ИЛИ, блок временной привязки и дешифратор, подключенный входом к выходу разностного счетчика, а пер- вьм и вторым входами - к первым входам соответственно первого и второго элементов 2-2И-ИЛИ, соединенных вторыми входами соответственно с вторым и с третьим выходами задатчйка, третьими входами - с выходом RS-триг- гера, а четвертыми входами соответственно с первым и вторым выходами датчика положения, подключенного третьим вькодом к R-входу RS-тригге- ра, соединенного S-входом с первым выходом задатчйка, выходы первого и второго элементов 2-2И-Ш1И подключены соответственно к первому и к второму входам блока временной привязки, соединенного третьим входом с выходом генератора синхронизации, первым и вторым выходами соответст-- венно с первым и вторым входами разностного счетчика.
Корректор М.Самборская
| название | год | авторы | номер документа |
|---|---|---|---|
| Лотовый уровнемер | 1986 |
|
SU1381338A1 |
| Устройство для стабилизации вакуума | 1983 |
|
SU1149060A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА МАГНИТНОЙ МУФТЫ | 1998 |
|
RU2141631C1 |
| Система для программного управления | 1985 |
|
SU1251033A1 |
| Система для испытания транспортных средств на топливную экономичность | 1985 |
|
SU1587367A1 |
| Устройство для синхронизации приводов | 1982 |
|
SU1086409A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Устройство коррекции мерной длины заготовки | 1987 |
|
SU1438915A1 |
Изобретение относится к вычислительной технике и может найти прифиг.. 1 менение в установках, в которых требуется синфазное и синхронное вращение ведущего и ведомых валов, которые разнесены на расстояние, при котором имеет существенное значение количество соединительных проводов между блоками привода . Цель изобретения - повышение точности привода - достигается тем, что сигналы с второго и третьего выходов задатчи- ка 1, установленного на задающем валу, в виде число-импульсной последовательности в зависимости от направления перемещения вала поступают на вторые входы первого либо второго элементов 2-2И-ИЛИ. А импульсы с пер
| Позиционный привод с цифровым управлением | 1976 |
|
SU624205A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Электрогидравлический следящий привод | 1976 |
|
SU641397A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Импульсная следящая система | 1975 |
|
SU553592A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
