Изобретение относится к области систем с программным управлением и может быть использовапо в различных установках, где необходимо производить неремещения, заданные в уиитарном коде.
Известны следящие системы, в которых перемещение исполнительного органа контролируется цифровым датчиком, а управляющий сигнал, воздействующий на исполнительный орган, пропорционалеи ошибке системы и ее интегралу 1. Такне системы обладают плохой устойчивостью.
Из известных следящих систем наиболее близкой по технической сущности является система, содержащая корректирующий блок, иервый и второй интеграторы и последовательно соединенные разностный счетчик, преобразователь код-аналог, сумматор, усилитель мощности и исполнительный двигатель, вал которого кинематически связан с датчиком полол ения, выход которого соединен со вторым входом разностного счетчика 2.
Релейный характер управляющего воздействия на исполнительный орган в известной системе обуславливает склонность к возникновению автоколебаний при отработке одиночных импульсов, а наличие в тахогенерато ре зоны нечувствительности приводит к неустойчивой работе системы на малых скоростях.
Целью изобретения является повышение устойчивости импульсной следящей системы.
Поставленная цель достигается тем, что в предложенной импульсной следящей системе установлен блок сравнения, первый вход которого через первый интегратор соединен с первым входом разностного счетчика, второй вход через второй интегратор - с выходом датчика положения, а выход - со вторым входом сумматора. Первый вход корректирующего блока соединен с первым входом разностного счетчика, второй вход - с выходом разностного счетчика, а выход - с третьим входом сумматора.
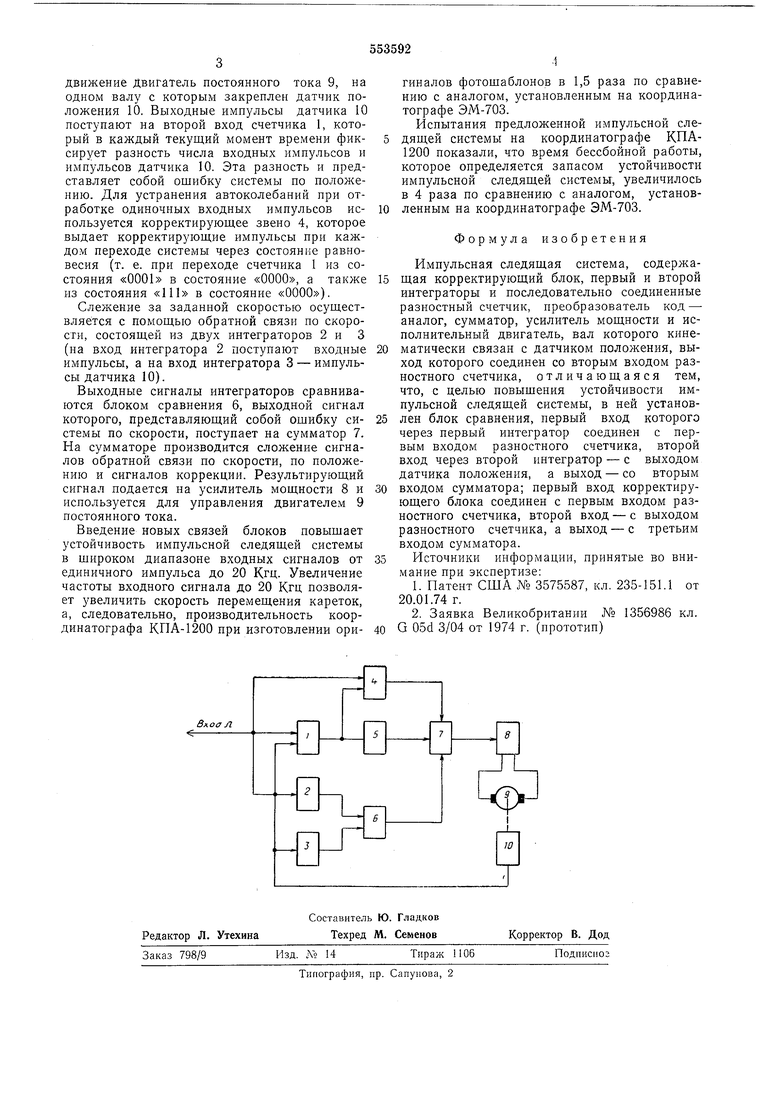
На чертеже представлена структ рная схема импульсной следящей системы.
Система содержит разностный счетчик 1, первый и второй интеграторы 2 и 3, корректирующий блок 4, преобразователь код-аналог 5, блок сравнения 6, сумматор 7, усилитель мощности 8, двигатель постоянного тока 9 и датчик положения 10.
Система работает следующим образом.
Входиой импульсный сигнал поступает на один из входов счетчика 1, в котором образуется цифровой код, отличный от нулевого, и на выходе преобразователя код-аналог 5 формируется сигнал ошибки по положению, который поступает на сумматор 7. При этом включается усилитель мощности 8, приводящий в
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1985 |
|
SU1283710A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| Следящая система | 1987 |
|
SU1631513A1 |
| Цифровая следящая система управленияпЕРЕМЕщЕНиЕМ Об'ЕКТА | 1979 |
|
SU798726A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
