Изобретение относится к области машиностроения, а именно к захватным устройствам промышленных роботов
Целью изобретения является повышение надежности работы путем выполнения рабочих элементов Г-образной формы с возможностью поворота вокруг их вертикальных осей.
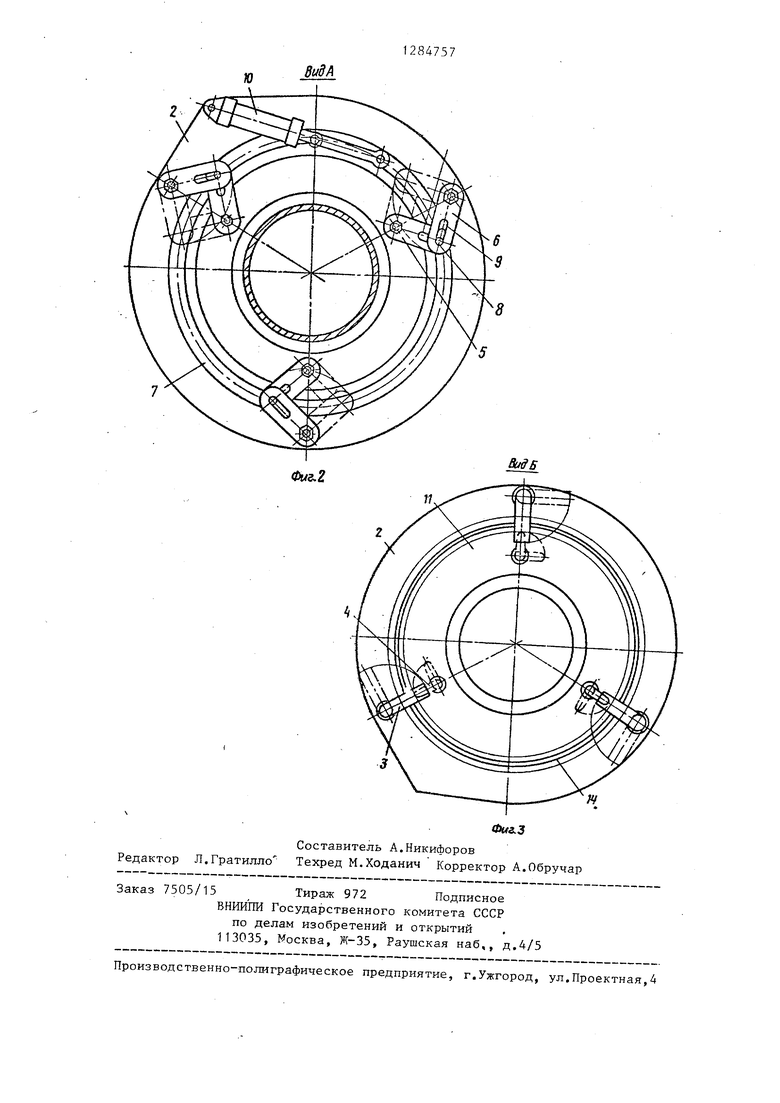
На фиг.1 изображено устройство, продольный разрез; на фиг.2 - вид А на фиг.1; на фиг.З - вид Б на фиг.1.
Захватное .устройство крепится к руке 1 манипулятора (не показан) и состоит из кольцеобразного основания 2, во втулках которого по окружности расположены рабочие элементы - поворотные захваты Г-образной формы 3 и поворотные центрирующие кулачки Г-образной формы 4. Кулачки 4 и захваты 3 жестко соединены с тягами 5 и 6. Кулачки 4 установлены с возможностью перемещения относительно основания 2 вдоль оси их . На основании 2 установлен поворотный диск 7 с возможностью вращения вокруг вертикальной оси. На диске 7 закреплены пальцы 8, входящие в продольные пазы 9 тяг 5 и 6. Поворотный .диск 7 соединен с. приводом-гидроцилиндром 10, закрепленным на основании 2. К основанию 2 на центрирующих кулачках 4 подвешена платформа 11. с установочными элементами 12, вместе с кулачками 4 отжимаемая пружинами 13.
Устройство работает следующим образом.
f
В исходном положении шток гидроци линдра 10 втянут, захваты 3 повернуты по касательной к наружной поверхности захватываемой детали 14,установленной на гладкой поверхности, центрирующие кулачки 4 параллельны захватам 3. Захватываемая деталь 14 свободно проходит между ними при опускании руки 1 манипулятора. При выдвижении штока гидроцилиндра 10 диск
1 поворачивается, пальцы 8 через тя- 60--поворотного диска.
5
0
ги 5 и 6 поворачивают кулачки 4 и захваты 3, при этом пальцы 8 скользят по продольным пазам тяг до упора.При контакте кулачка 4 и внутренней поверхности захватываемой детали 14 кулачок перемещает деталь 14, устанавливая его соосно захватному устройству. При лодьеме захватного устройства пружины 13 прижимают платформу 11 к торцу захватываемой детали 14,кулачки 4 не выходят из контакта с обработанной поверхностью детали 14 и его положение относительно оси захвата сохраняется. При втягивании штока гидроцилиндра 10 поворотный диск 7 через тяги 5 и 6 поворачивает захваты 3 и центрирующие кулачки 4 в исходное положение, происходит расфиксация детали 14 и все эле- ,,менты захвата свободно выходят из детали 14.
Формула изобретения
Центрирующее захватное устройство, содержащее основание и рабочие элементы, выполненные в виде центрирующих кулачков и захватов, кинематически связанных с приводом, отличающее ся тем, что, с целью повышения надежности работы, устройство снабжено подпружиненной относительно основания платформой, с установочными элементами, а каждый рабочий элемент выполнен Г-образной формы и установлен в основании с возможностью поворота, при этом кинематическая связь между приводом и попарно расположенными в основании рабочими элементами выполнена в виде поворотного относительно оси основания диска, закрепленных на поворотном диске пальцев и попарно размещенных на каждом пальце тяг с пазами, причем одни концы каждой пары тяг закреплены соответственно на концах центрирующего элемента и захвата,а другие концы - шарнирно установлены посредством пазов на каждом пальце
BiidA
2
М
Редактор Л.Гратилло
Фи&.3
Составитель А.Никифоров
Техред М.Ходанич Корректор А.Обручар
Заказ 7505/15 Тираж 972 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4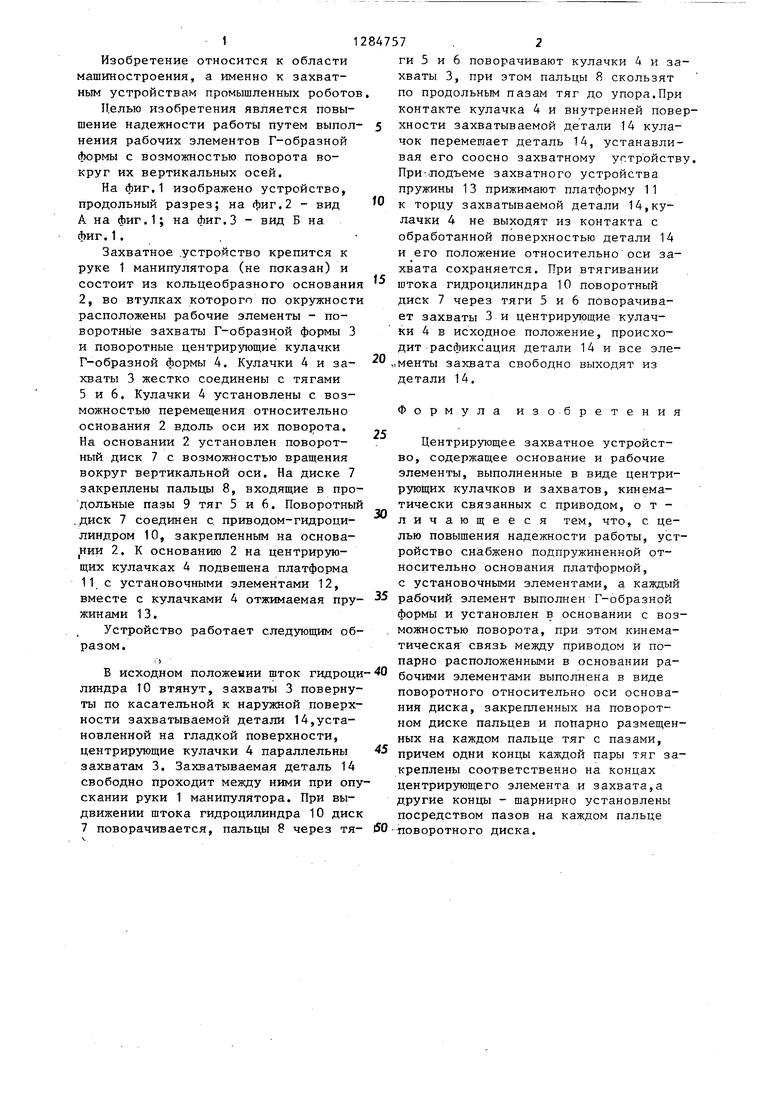
| название | год | авторы | номер документа |
|---|---|---|---|
| Центрирующее захватное устройство | 1985 |
|
SU1283099A1 |
| Кисть манипулятора | 1987 |
|
SU1423372A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| Автоматический ключ для свинчивания и развинчивания насосных штанг | 1986 |
|
SU1350325A1 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
| Лесозаготовительная машина | 1990 |
|
SU1808261A1 |
| Машина для уборки томатов | 1990 |
|
SU1819523A1 |
| Устройство для ориентации манипулятора | 1979 |
|
SU831616A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
Изобретение относится к области машиностроения, а именно к захватным устройствам промышленных роботов. Изобретение позволяет повысить надежность работы путем выполнения рабочих элементов Г-образной формы с возможностью поворота вокруг их вертикальных осей. Устройство содержит основание 2, рабочие элементы - захваты 3 и центрирующие кулачки 4, жестко соединенные с тягами 5 и 6, в которых выполнены пазы. Поворотный диск 7 с пальцами 8 соединен с.приводом-гидроцилиндром 10. К основанию 2подвешена платформа 11 с установочными элементами 12 и пружинами 13. 3ил. (Л С N9 СХ) « СП lfi Фи.}
| Схват промышленного робота | 1980 |
|
SU895650A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
