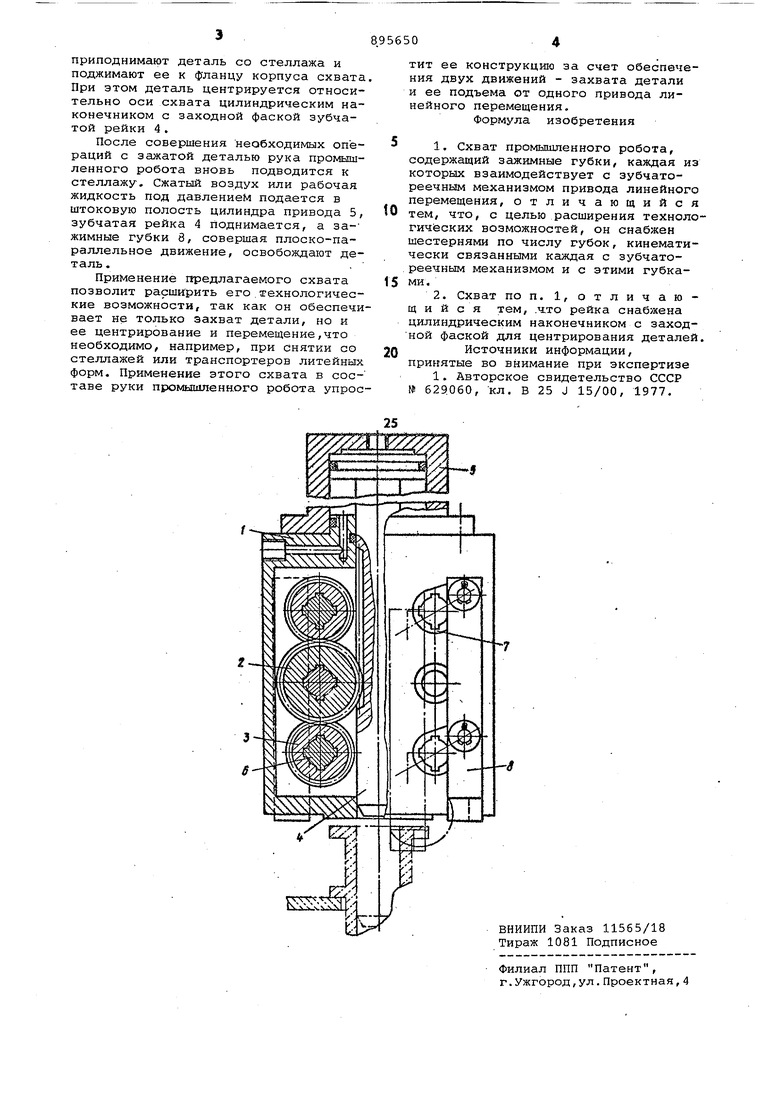
Изобретение относится к области машиностроения, а именно к промышлен ным работам и манипуляторам, например, для автоматизации технологических процессов в производстве .литейных форм повыплавляемым моделям. Известен схват промышленного робо та, содержащий зажимные губки/каждая из которых взаимодействует с зубчато-реечным механизмом привода линейного перемещения 1 . Недостатком известного устройства является невозможность поступательного перемещения зажимных губок С целью расширения технологически возможностей предлагаемый схват снаб жен шестернями по числу губок, кинематически связанными с зубчато-реечным механизмом и f этими губками,при чем рейка снабжена цилиндрическим наконечником с заходной формой для центрирования деталей. Предлагаемое техническое решение поясняется чертежом. На чертеже показан предлагаемый схват промышленного робота. Предложенное устройство состоит из корпуса 1, в котором расположёны ведущие шестерни 2, каждая из которых находится в зацеплении с двумя ведомыми шестернями 3. Ведущие шестерни 2 находятся в зацеплении с имеющей возможность поступательного перемещения зубчатой рейкой 4, связанной со штоком поршня пневмо- или гидроцилиндра привода 5. Шестерни 3 расположены на валах 6, на которых закреплены водила 7. На водилах 7 да одинаковых расстояниях от осей вращения ведомых шестерен 3 шарнирно установлены зг1жимные губки 8. Рейка 4 снабжена цилиндрическим наконечником с заходной фаской. Схват работает следующим образом. При подаче сжатого воздуха или рабочей жидкости под давлением в заштоковую полость цилиндра привода 5 перемещается зубчатая рейка 4, которая вращает ведущие шестерни 2. Шестерни 2, в свою очередь, вращают находящиеря с ними в зацеплении ведомые шестерни 3 с валом 6 и водилами 7. Водила 7, вращаясь, перемещают зажимные губки 8,Зажимные губки 8, перемещаясь, совершают плоско-параллельное движение, первоначально обходя фланец детали, а затем, подхватив ее снизу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Манипулятор | 1988 |
|
SU1593948A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Схват манипулятора | 1981 |
|
SU994253A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
