Изобретение относится к машиностроению, приборостроению и может быть использовано во всех отраслях народного хозяйства для автоматического, мелкосерийного и единичного производ- ства механообработки, сборки-разборки и других процессов в условиях безлюдной технологии.
Цель изобретения - повышение гибкости и надежности системы.
Цель обеспечивается возможностью многовариантной обработки изделий в системе с участием тех или иных производственных ячеек в зависимости от их загрузки, работоспособности и др. факторов, а также многовариантного перемещения изделий и инструмента от ячейки к ячейке с использованием только внутриячеечных транспортных и складских средств.
На фиг.1 представлена схема гибкой производственной системы; на фиг.2 - элементарная ячейка в виде шестиугольника.
Гибкая производственная система (ГПС) содержит автоматизированные производственные ячейки 1, включающие в себя систему 2 управления, технологическое оборудование 3, роботы 4 и склад 5, равномерно распределенный по границам каждой из ячеек. Загрузоч но-разгрузочную позицию системы представляют собой склады 5, расположенные -на внешних границах системы, крайних в плане ячеек 1. Системы 2 управ- ления крайних ячеек имеют устройства 6 ввода-вывода информации, отражающей установку-снятие изделий и инструмента на загрузочно-разгрузочную позицию системы.
Каждая производственная ячейка (фиг.2) содержит технологическое оборудование 3, систему Z управления, робот 4 и склад 5. Перемещение заго- товки, детали, инструмента и т.д. как внутри ячейки, так и по всей ГПС осуществляется только с помощью внутри- ячеечных роботов 4 через общие границы складов 5.
Системы 2 управления всех ячеек могут обмениваться информацией друг с другом по линиям 7 связи. Кроме того, они могут обмениваться информа- цией с внешними устройствами через устройства 6 ввода-вывода. Совокупность систем 2 управления, каналов 7 связи и устройств 6 ввода-вывода об
5
0
5
5
O
35
45 0
j
0
разуют однородную вычислительную структуру, обеспечивающую повышенную гибкость и живучесть ГПС.
ГПС работает следующим образом.
При поступлении на вход ГПС заготовок, сборочных единиц и т.д. система управления ГПС, образуемая совокупностью систем 2 управления, принимает решение о том, какая из ячеек 1 в данный момент свободна (или сводится первой) . В выбранную ячейку объект производства передается посредством последовательного перемещения с помощью ро- бсгтов 4 через общие зоны складов 5 в соответствии с выбранным маршрутом движения. При этом в случае выхода из строя одного или нескольких .роботов 4 или складов 5 можно найти обходной маршрут доставки объекта производства в выбранную элементарную ячейку 1. Аналогичным образом происходит передача после окончания переработки обработанной детали, собранного узла и т.д. на загрузочно-разгрузочную позицию ГПС.
В случае выхода из строя одной или нескольких единиц технологического оборудования 3 система продолжает работать до тех пор, пока не выходят из строя все однотипные единицы всех ячеек 1.
I
Формула изобретения
1. Гибкая производственная система, содержащая гибкие производственные модули с технологическим оборудованием, транспорно-накопительную систему для изделий и инструментов с участком загрузки-разгрузки, систему управления, отличающаяся тем, что, с целью повышения гибкости и надежности, гибкие производственные модули выполнены в виде ячеек, имеющих в плане одинаковую конфигурацию, связанных между собой общими границами и полностью - без разрывов - за-, полняющие отведенную под гибкую производственную систему площадь, а транспортно-накопительная система для изделий и инструментов выполнена в виде складов, распределенных по границам каждой из ячеек, и роботов, размещенных в каждой ячейке с возможностью взаимодействия при перемещении и подаче изделий и инструментов с оборудованием и складом своей ячейки, а также - с участками складов, рас3128
положенных в соседних ячейках, имеющих с этой ячейкой общие границы, а система управления гибкой производственной системы выполнена как совокупность одинаковых и одинаково соеди- ненных между собой систем управления, каждая из которых установлена в ячейке с возможностью управления работой технологического оборудования, робота и склада своей ячейки и связан с системами управления соседних ячеек для обмена информацией, касающейся передаваемых друг от друга изделий и инструментов.
2,Гибкая производственная система поп.1, отличающаяся тем, что участки складов ячеек, расположенные на внещних границах системы, составляют загрузочно-разгрузоч- ную позицию системы.
3.Гибкая производственная система по пп. 1 и2, отличающ а- я с я тем, что системы управления крайних производственных ячеек снабжены устройствами ввода-вывода информации, отражающей установку-снятие изделий и инструментов на загрузочно- разгрузочную позицию системы.
Фиг.г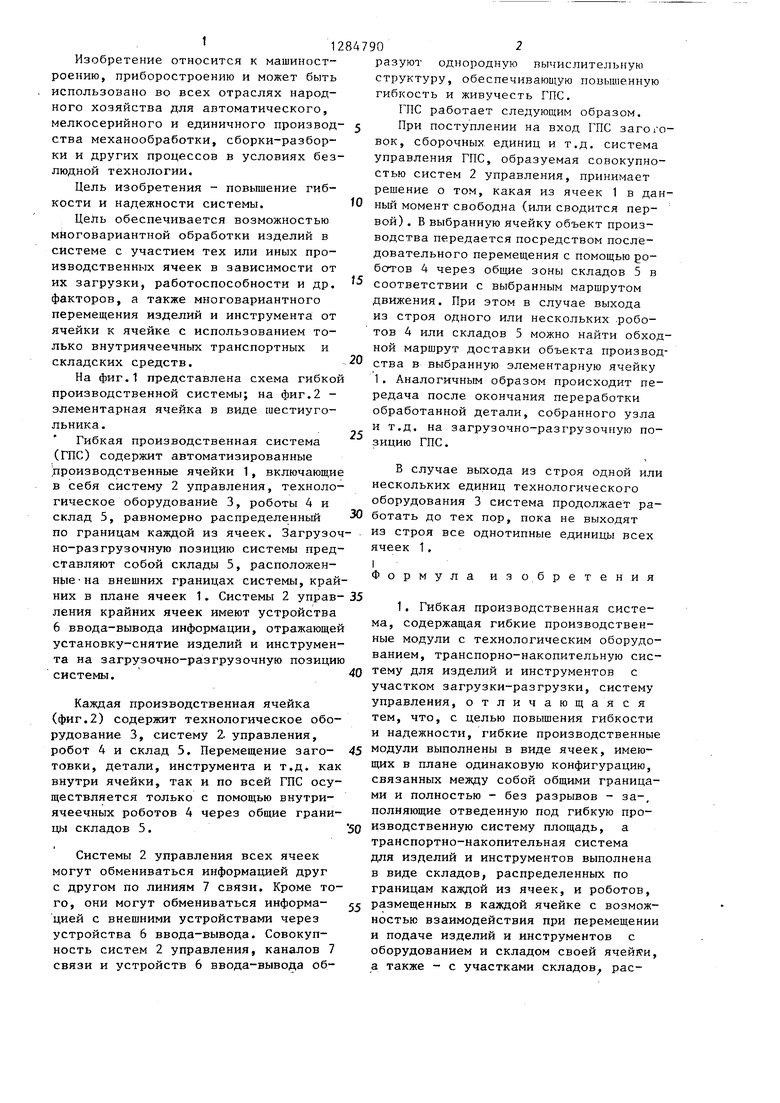
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкая производственная система | 1986 |
|
SU1373535A1 |
| Гибкая производственная система | 1988 |
|
SU1743802A1 |
| ГИБКАЯ ПРОИЗВОДСТВЕННАЯ СИСТЕМА | 2012 |
|
RU2510320C2 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| СПОСОБ ОБМЕНА ГРУЗАМИ, УСТРОЙСТВО ОБМЕНА ГРУЗАМИ, СПОСОБ ФОРМИРОВАНИЯ ГРУЗОНЕСУЩЕЙ ПОВЕРХНОСТИ НАКОПИТЕЛЯ И ГИБКАЯ ПРОИЗВОДСТВЕННАЯ СИСТЕМА НА ИХ ОСНОВЕ | 2011 |
|
RU2486045C1 |
| Гибкое автоматизированное производство | 1984 |
|
SU1291366A1 |
| Автоматизированный участок гибкой производственной системы | 1988 |
|
SU1574435A1 |
| Гибкое автоматизированное производство | 1985 |
|
SU1351747A1 |
| Автоматическая линия для механической обработки цилиндрических деталей | 1983 |
|
SU1135607A1 |
| КОНТЕЙНЕР-МОДУЛЬ | 1992 |
|
RU2108950C1 |
Изобретение относится к машиностроению, приборостроению и может быть использовано во всех отраслях народного хозяйства для автоматического мелкосерийного и единичного производства механообработки, сборки- разборки и других процессов в условиях безлюдной технологии. Цель изобретения - повьшение гибкости и надежности гибкой производственной системы (ГПС) - обеспечивается возможностью многовариантной обработки изделий в системе с участием всех составляющих ГПС производственных ячеек 1 в зависимости от их загрузки, работоспособности и других факторов, а также многовариантностью перемещения изделий и инструмента от ячейки к ячейке с использованием только внутриячеечньпс транспортных и складских средств. 2 3.п. ф-лы. 2 ил. (Л Х 4:: ;о
Редактор И.Дербак
Составитель А.Котов
Техред Л.Сердюкова Корректор Е.Сирохман
Заказ 7507/17Тираж 785 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д. /5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Белянки П.Н | |||
| и др | |||
| Гибкие производственные комплексы | |||
| - М.: Машиностроение, 1984, с.183 - 193, рис.55. |
