1
Изобретение относится к машиностроению, например к робототехнике, и может быть использовано при оснащении технологического оборудования средствами автоматизации установки и съема изделий.
Цель изобретения - повьппение производительности работы робото-техни- ческого комплекса..
Указанная цель достигается за счет установки и выгрузки нескольких деталей одновременно с последующей укладкой их каждую в свою тару.
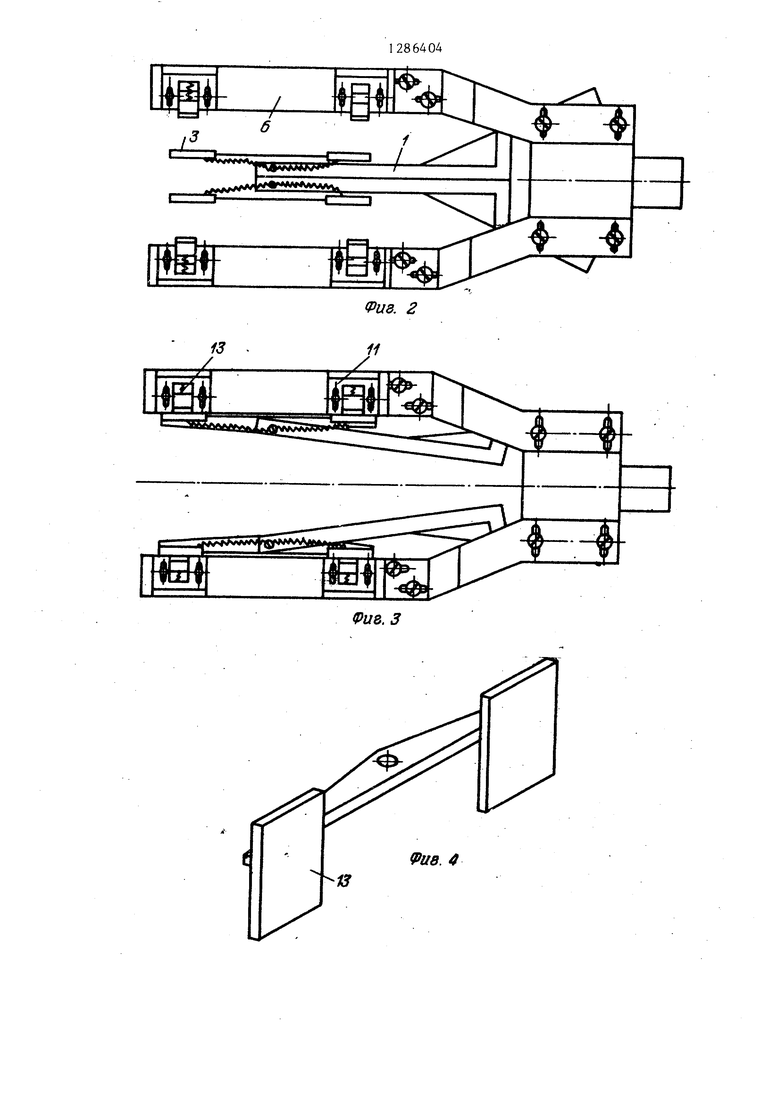
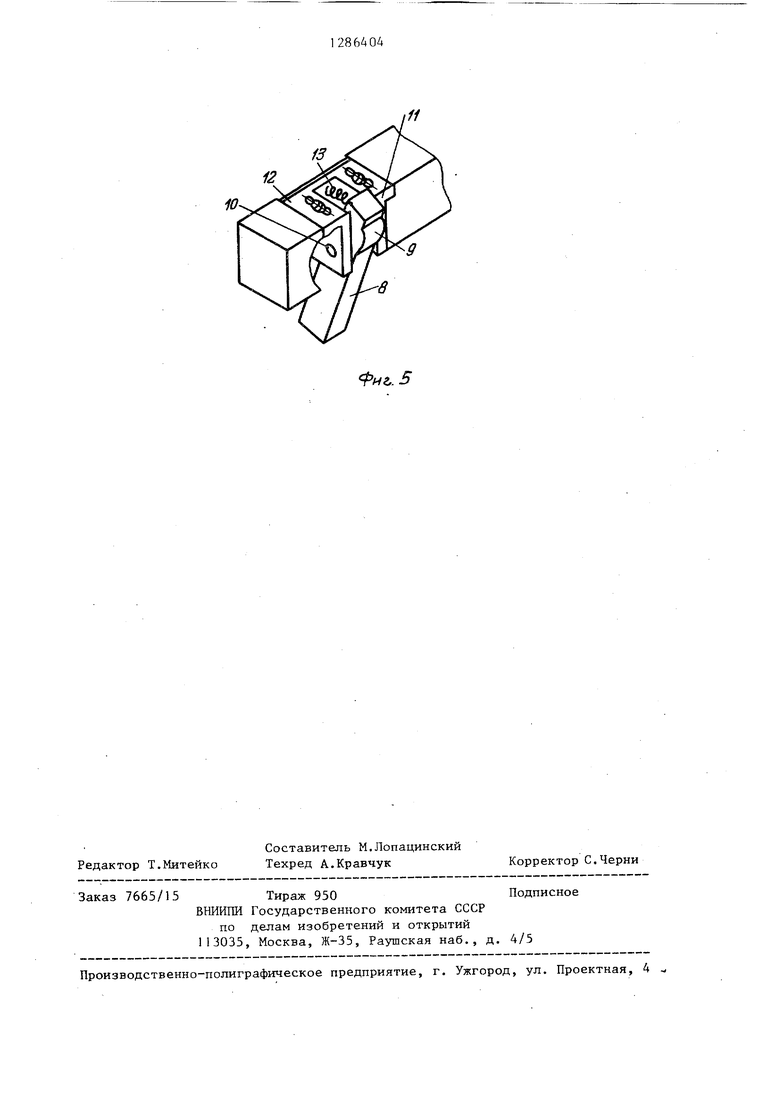
На фиг.1 изображен предлагаемый схват, общий вид; на фиг.2 - то же, исходное положение, вид сверху; на фиг.З - то же, момент захвата деталей, вид сверху; на фиг.4 - захват в виде двуплечего рычага; на фиг.5 - то же, в виде подпружиненного паль- ца, шарнирно установленного в съемной регулируемой обойме.
Схват содержит подвижные губки , связанные с приводом, размещенным в корпусе 2, захваты 3, выполненные
в виде двуплечих рычагов, закрепленных на подвижных губках 1 осями 4 и подпружиненных с помощью пружин 5, неподвижные губки 6, соединенные с корпусом 2 планками 7, захваты 8 выполнены в виде пальцев с упорами 9 и шарнирно установлены на осйх i О в съемных, регулируемых обоймах 1, кот орые размещены в пазах 12 и подпружинены пружинами 13.
Схват работает следующим образом.
Заготовку устанавливают./ Например, в разрубной штамп. После разрубки заготовки на«четыре детали схват, установленный на руке робота, вводят в зону штампа и опускают таким образом, чтобы нижние концы захватов 3 не доходили до основания деталей на 0,5 - 1 мм. Подается команда на захват деталей. Подвижные губки 1 с установленными на них захватами 3, вьтолнен- ными в виде двуплечих рычагов от привода, размещенного в корпусе 2, начи
10
15
20
30
35
.
, , н-ии2864042
нают расходиться. Захваты 3, разворачиваясь на осях 4, нижними конпами воздействуют на детали, а верхними - на упоры 9 захватов 8, выполненных в 5 виде пальцев, которые, поворачиваясь На осях 10, нижними концами поджимают детали к захватам 3.
Захватив детали, схват, установленный на руке робота, выводится из зоны штампа, после чего подается команда на сжатие подвижных губок 1. При сжатии последних с размещенными на них захватами 3 детали освобождаются и укладываются каждая в свою тару. Захваты 3 и 8 возвращаются в исходное положение под действием пружин 5 и 13, Схват готов к захвату новой партии деталей.
Для перенастройки схвата на другие габариты деталей достаточно раздвинуть (сдвинуть) неподвижные губки 6 по пазам, вьшолненным на планках 7, и переместить каждую из обойм «1 1, установленных на подвижных губках 6,
Формула изобретения
Схват промьшшенного робота, содержащий корпус, с размещенным в нем приводом, подвижные и неподвижнь1е губки с захватами, отличающийся тем, что, с целью повьш1е- ния производительности за счет зажима и перемещения одновременно нескольких деталей, схват снабжен пружинами, предназначенными дпя взаимодействия с захватами, причем последние выполнены в виде равноплечих рычагов, установленных на подвижных губках, и сменными регулируемыми обоймами, расположенными в выполненных в неподвижных губках пазах, а захваты на неподвижных губках вьтол- нены в виде шарнирных пальцев, установленных в сменных регулируемых обоймах, при этом на шарнирном пальце вьптолйен упор, предназначенный для взаимодействия с захватом, вьтол- ненным в виде равноплечего рычага.
(PU8. 2
13 Фиг. 3
tPUB. 4
f3
12
Редактор Т.Митейко
Составитель М.Лопацинский Техред А.Кравчук
Заказ 7665/15 Тираж 950Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
и.5
Корректор С.Черни
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1985 |
|
SU1289679A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват промышленного робота | 1985 |
|
SU1284831A1 |
| Схват промышленного робота | 1983 |
|
SU1177150A2 |
| Схват робота | 1990 |
|
SU1761463A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват робота | 1983 |
|
SU1117205A1 |
Изобретение относится к робототехнике. Целью изобретения является повышение производительности робото- технического комплекса и достигается за счет установки нескольких деталей одновременно с последующей-укладкой их каждую в свою тару. Схват содержит корпус 2 с подвижными 2 и неподвижными 6 губками. Подвижные губки 1 связаны с приводом. Захваты 3 выполнены в виде равноплечих рычагов, закрепленных на подвижных губках 1 осями 4 и подпружинены упругими элементами. Захваты 8 выполнены в виде шарнирных пальцев с упорами 9. Захваты 8 установлены в сменных регулируемых обоймах 11 на неподвижных губках 6. 3 ил. // (Л 9ua.
| Козырев Ю.Г | |||
| Проьашшенные роботы | |||
| Справочник | |||
| М.: Машиностроение, 1983, с | |||
| Счетная линейка для вычисления объемов земляных работ | 1919 |
|
SU160A1 |
| Механический грохот | 1922 |
|
SU41A1 |
