Изобретение относится к iviaujHHocTpoe- нию, а именно к захватным устройствам промышленных роботов, предназначенных для транспортирования крупногабаритных кассет с -деталями.
Цель изобретения - уменьшение дина- мических нагрузок на конструкцию руки робота.
На чертеже представлен захват промыил- ленного робота.
Захват промышленного робота содержит ю корпус 1, зажимные губки, каждая из которых состоит из подвижной 2 и неподвижной 3 частей, установленных с возможностью взаимно параллельного движения с помощью зубчатых направляющих 4 и 5, вхоторый, взаимодействуя с шестерней 6, находящейся в зацеплении с зубчатыми направляющими 4 и 5, обеспечивает, поступательное параллельное перемещение зажимных губок в направляющих корпуса 1. Зажимные губки сходятся до тех пор, пока подвижная часть 2 губок не коснется корпуса кассеты 12. При этом Г-образный захват 9 подвижной части 2 губок и Г-образный элемент 18 неподвижной части 3 губок входят в пазы 20 кассеты 12, оставляя при этом зазор между верхней частью паза 20 кассеты и Г-образным захватом 9, равный 3-5 мм. В случае несимметричного расположения кассеты 12 относительно захва та происходит отклонение в горизонтальном
дящих в зацепление с шестерней 6 приво- направлении тех подвижных частей 2 губок, да (не показан). Подвижная часть 2 губок выполнена в виде пружины 7 растяжения Верхний конец подвижной части 2 губок жестко закреплен стопорными винтами 8 в неподвижной части 3 губок, а нижний JQ конец выполнен в виде Г-образного захвата 9. В противоположном ему направлении установлен клинообразный элемент 10 с возможностью взаимодействия с ответными элементами 11 зубчатой формы, расположенкоторые первыми коснутся кассеты 12.
Клинообразный элемент 10 в начальный момент сведения губок не взаимодействует с зубчатыми элементами 11 неподвижной части 3 губок, так как расстояние от конца элемента 10 до элементов 11 на 1-2 мм больше максимально допустимой погрешности позиционирования захвата, над захватываемым объектом.
В момент взаимодействия микропереклюными на внутренней стороне неподвижной 25 чателя. 16 с упором 17 подается коман- части 3 губок. Элемент 10 служит для на-да на включение механизма вертикального
перемещения захвата.
При подъеме захвата кассета
дежного фиксирования кассеты 12 с уложенными в ней деталями 13 перед окончательным ее зажимом неподвижной частью 3 губок. Кассета 12 устанавливается на под12 поднимается вверх на 30-40 мм, самоустанавливаясь под собственным весом на
ставку 14 с направляющими 15, облегча- Г-образных захватах 9 губок. При этом под
ющими установку кассеты при неточно.м позиционировании кассеты 12 роботом относительно подставки. К зубчатой направляющей 4 крепится микропереключатель 16, взаимодействующий с закреплен Ным на корпусе 1 упором 17 и дающий команды на включение привода зажимных губок при операциях опускание-подъем, разжим-зажим
Пеподвижная часть 3 губок выполнена также с Г-образным элементом 18, служащим для ограничения вертикального хода захвата 9 под действием сил инерции, возникающих в момент подъема и останова, и имеет паз 19, в котором размещена упругая подвижная часть 2 губок, Г-образный
захват 9 которой расположен выще захва- 45 чатой формы неподвижной части 3 губок, та 13 на величину, равную растяжениюнадежно фиксируя тем самым кассеты 12
Скорость сведения губок подобрана так, что именно на высоте 30-40 мм происхо- 40 дит окончательный зажим кассеты губками. При этом перемещающиеся части 3 губки зас тавляют еще больше отклоняться подвижную часть 2 губок в горизонтальном направлении, обеспечивая взаимодействие клинообразного элемента 10 с элементами 11 зубпружины 7 под действием максимального веса кассеты 12 с деталями и инерционной силы. В кассете 12 выполнены пазы 20 для непосредственного взаимодействия с Г- образными захватами 9.
Захват промышленного робота работает следующим образом.
В исходном положении зажимные губки разведены в стороны. Кассета 12 с деталями 13 перед захватыванием расположена на подставке 14. При подаче команды на сжатие зажимных губок влкючается привод их перемещения (не показан), ко50
55
в захвате.
В момент касания торцов кассеты 12 и неподвижной части 3 губок происходит по- выщение токовой нагрузки на приводе, что дает команду на его отключение, дальнейшее сведение губок прекращается. Далее кассета 12 транспортируется по пути траектории движения. Установка кассеты 12 на подставку 14 осуществляется в обратной последовательности.
Формула изобретения
Захват промышленного робота, содержащий корпус, приводные губки, состоящие из
торый, взаимодействуя с шестерней 6, находящейся в зацеплении с зубчатыми направляющими 4 и 5, обеспечивает, поступательное параллельное перемещение зажимных губок в направляющих корпуса 1. Зажимные губки сходятся до тех пор, пока подвижная часть 2 губок не коснется корпуса кассеты 12. При этом Г-образный захват 9 подвижной части 2 губок и Г-образный элемент 18 неподвижной части 3 губок входят в пазы 20 кассеты 12, оставляя при этом зазор между верхней частью паза 20 кассеты и Г-образным захватом 9, равный 3-5 мм. В случае несимметричного расположения кассеты 12 относительно захва та происходит отклонение в горизонтальном
направлении тех подвижных частей 2 губок,
направлении тех подвижных частей 2 губок,
которые первыми коснутся кассеты 12.
Клинообразный элемент 10 в начальный момент сведения губок не взаимодействует с зубчатыми элементами 11 неподвижной части 3 губок, так как расстояние от конца элемента 10 до элементов 11 на 1-2 мм больше максимально допустимой погрешности позиционирования захвата, над захватываемым объектом.
В момент взаимодействия микропереключателя. 16 с упором 17 подается коман- да на включение механизма вертикального
При подъеме захвата кассета
12 поднимается вверх на 30-40 мм, самоустанавливаясь под собственным весом на
Г-образных захватах 9 губок. При этом под
Г-образных захватах 9 губок. При этом под
чатой формы неподвижной части 3 губок, надежно фиксируя тем самым кассеты 12
действием веса кассеты 12 и инерционных сил, возникающих в момент разгона, пружина 7 растягивается, снижая тем самым ударный эффект в начальный момент подъема и динамическую нагрузку на конструкцию робота, что позволяет поднимать кассету с высокой скоростью (0,8-1,5 м/с) и применять привод меньшей моп ности.
Скорость сведения губок подобрана так, что именно на высоте 30-40 мм происхо- дит окончательный зажим кассеты губками. При этом перемещающиеся части 3 губки зас тавляют еще больше отклоняться подвижную часть 2 губок в горизонтальном направлении, обеспечивая взаимодействие клинообразного элемента 10 с элементами 11 зуб
в захвате.
В момент касания торцов кассеты 12 и неподвижной части 3 губок происходит по- выщение токовой нагрузки на приводе, что дает команду на его отключение, дальнейшее сведение губок прекращается. Далее кассета 12 транспортируется по пути траектории движения. Установка кассеты 12 на подставку 14 осуществляется в обратной последовательности.
Формула изобретения
Захват промышленного робота, содержащий корпус, приводные губки, состоящие из
1288052 34
подвижной и неподвижной частей, отличаю-конец которой закреплен в неподвижной
щийся тем, что, с целью уменьшения ди-части губки, а нижний выполнен Г-образнамических нагрузок на конструкцию рукиным и имеет возможность жесткой фикробота, подвижная часть губки выпол-сации относительно своей неподвижной
нена в виде пружины растяжения, верхнийчасти.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| Захватное устройство | 1984 |
|
SU1199614A1 |
| Автомат для ударно-стыковой сварки | 1971 |
|
SU442030A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Схват | 1983 |
|
SU1093546A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Захват промышленного робота | 1980 |
|
SU887157A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Захватное устройство | 1983 |
|
SU1220788A1 |
Изобретение относится к области машиностроения, а именно к захватны.м устройствам промышленных роботов, предназначенных для транспортирования крупногабаритных кассет с деталями. Цель изобретения - уменьшение динамических нагрузок па конструкцию руки робота. Захват промышленного робота содержит корпус 1, приводные губки, состоящие из неподвижной 3 и закрепленной на ней подвижной 2 частей. Подвижная часть губок выполнена в виде пружины растяжения 7, верхний конец которой закреплен в неподвижной части губок, а нижний выполнен Г-образным. Подвижная часть губки имеет возможность жесткой фиксации относительно неподвижной при помощи клинообразного элемента Ш и зубцов II. I ил. (Л ;; оо 00 о ел /2 А. 3 8 J5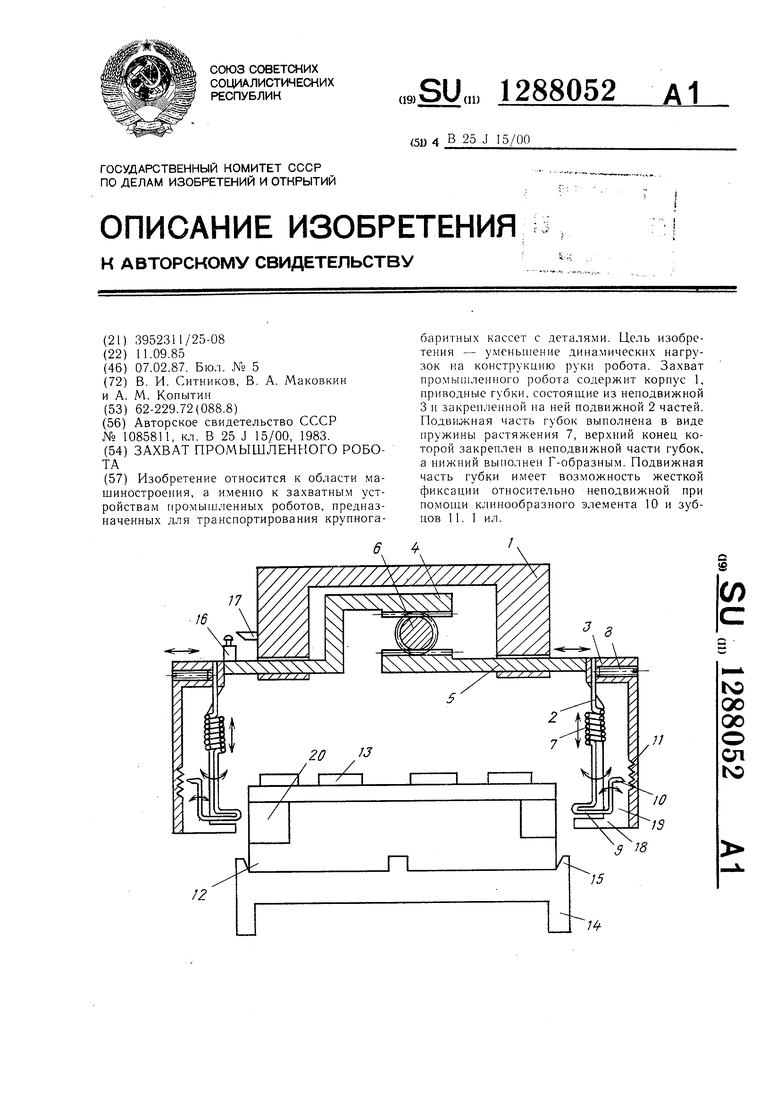
| Шпонка для закрепления шкива на валу | 1928 |
|
SU10858A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
