Изобретение относится к машиностроению и может быть использовано в качестве схватов промышленных роботов и манипуляторов для захвата деталей преимущественно цилиндрической формы,
: Целью .изобретения является упрощение конструкции и управления схватом.
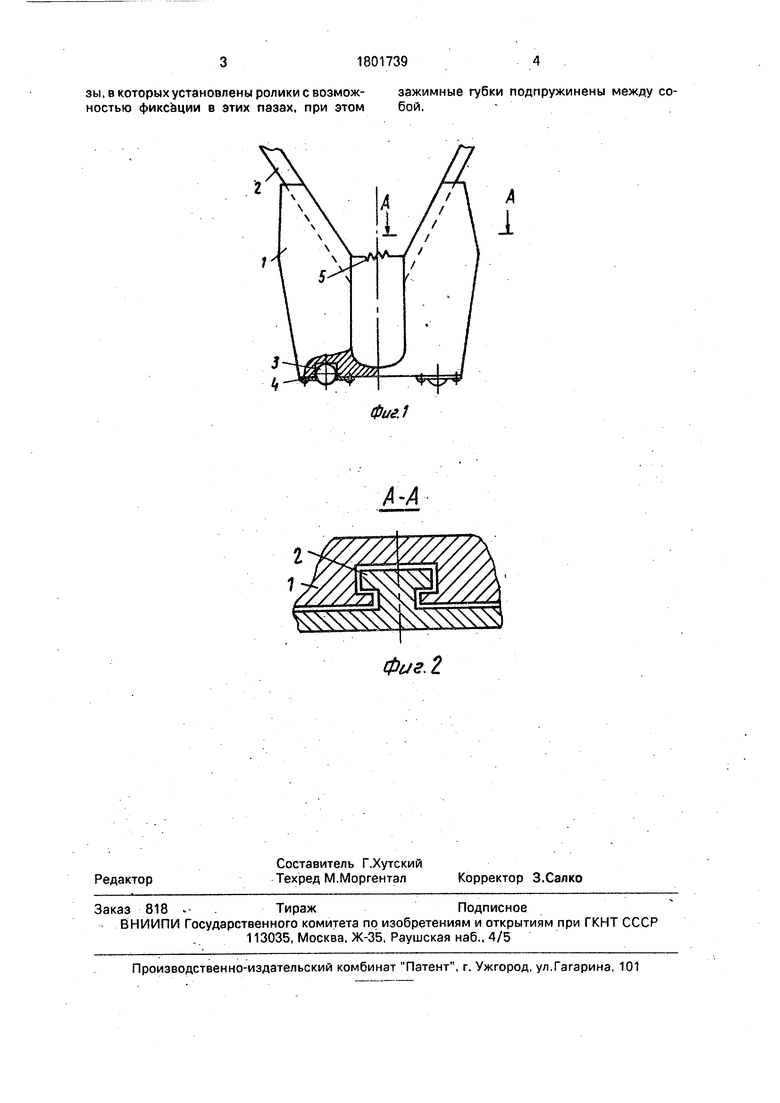
На фиг.1 показан схват; на фиг.2 - разрез А-А на фиг. 1.
Схват манипулятора содержит губки 1 со скосами в верхней части. На поверхности скосов выполнены пазы, в которые установлены направляющие 2, закрепленные на последнем звене манипулятора (не показаны). На наружной поверхности губок выполнены пазы, в которые установлены ролики 3. Пазы закрыты крышками 4 (фиг.1) с отверстиями для роликов 3, причем площадь отверстия меньше площади сечения ролика по его оси. Оси роликов расположены перпендикулярно направлению сведения губок 1. Губки подпружинены с помощью пружины 5.
Устройство работает следующим образом.
В исходном состоянии губки сведены силой натяжения пружины 5.
Для захвата детали манипулятор упирается схватом в поверхность стола, губки 1 расходятся. Далее по роликам 3 схвата с раскрытыми губками подводят к детали. При выполнении подъема схвата губки сходятся и зажимают деталь.
Для освобождения детали манипулятор с деталью упирается схватом в поверхность стола и перемещает разведенные губки до выхода их из зоны детали, а затем приподнимает схват для приведения его в исходное состояние.
Формула изобретения
Схват манипулятора, содержащий кор- пус, направляющие, выполненные в корпусе под углом к оси, и зажимные губки, установленные в направляющих с возможностью перемещения, отличающийся тем,-что, с целью упрощения конструкции, на наружной стороне губок выполнены па00
О
VJ
CJ Ю
зы, в которых установлены ролики с возмож- зажимные губки подпружинены между со- ностью фиксации в этих пазах, при этом бой.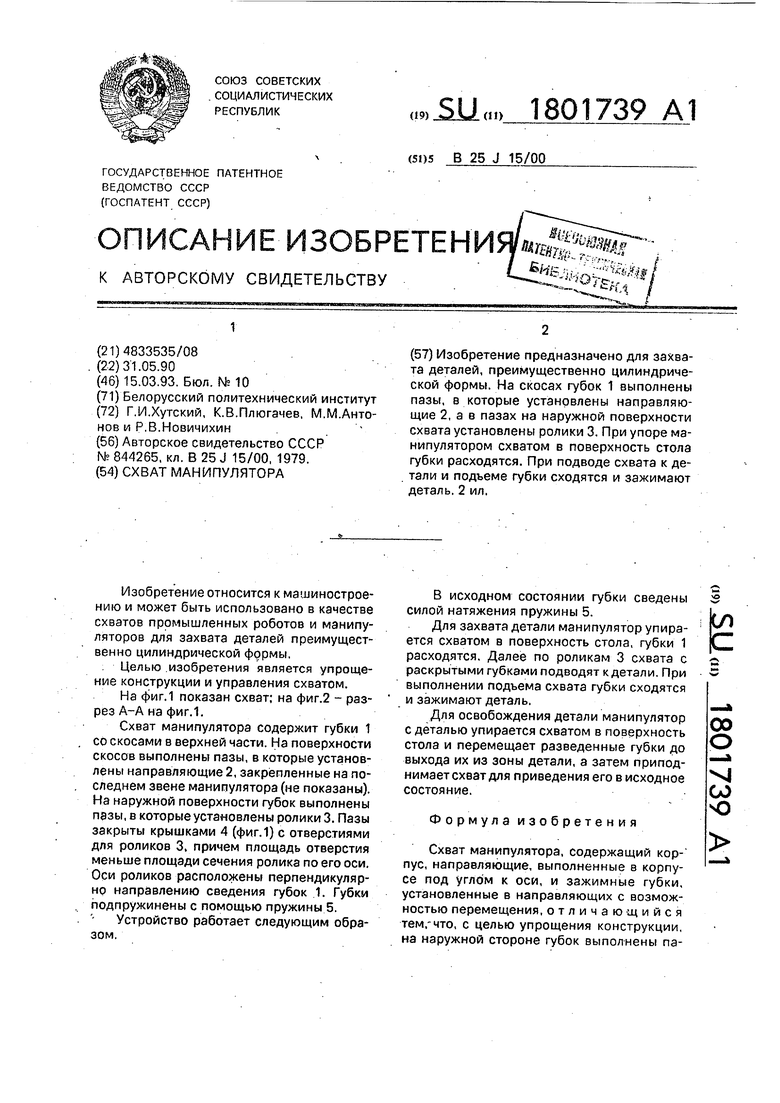
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Схват манипулятора | 1981 |
|
SU965655A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Схват | 1982 |
|
SU1060469A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Захватное устройство | 1988 |
|
SU1535716A1 |
| Гибкий производственный модуль | 1986 |
|
SU1404273A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
Изобретение предназначено для захвата деталей, преимущественно цилиндрической формы. На скосах губок 1 выполнены пазы, в которые установлены направляющие 2, а в пазах на наружной поверхности схвата установлены ролики 3. При упоре манипулятором охватом в поверхность стола губки расходятся. При подводе схвата к детали и подъеме губки сходятся и зажимают деталь. 2 ил.
Фиг. 2
| Захват промышленного робота | 1979 |
|
SU844265A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
