Изобретение относится к рабочим органам промышленных роботов и может быть использовано для автоматизации сборки, сварки и других процессов в приборостроении, электронной промышленности и других отраслях.
Для манипулирования различными деталями широко используются различные механические, вакуумные, электромагнитные и с постоянными магнитами захватные устройства. Механические устройства сложны по конструкции и не всегда надежны в работе.
Целью изобретения является повышение точности позиционирования захватываемой детали и упрощение конструкции.
Поставленная цель достигается тем, что в захватном устройстве на конце стержня выполнен поясок, а сбрасыватель имеет базирующую полость, соответствующую форме захватываемой детали, и снабжен защелкой, выполненной в виде коромысла, одно из пле- чей которого выступает внутрь базирующей полости.
Для обеспечения возможности выгрузки детали в любом пространственном положении защелка снабжена пружиной, связывающей одно из плечей коромысла со сбрасывателем.
При необходимости в быстрой переналадке захватного устройства на захват деталей другой формы и размеров сбрасыватель должен быть выполнен составным, при этом его направляющая часть должна быть выполнена с возможностью перемещения вдоль оси стержня, а часть с базирующей полостью - соответствовать форме захватываемой детали и являться сменной.
С целью уменьщения намагничивания захватываемой детали размеры базируюплей полости сбрасывателя выполнены такими, что при захвате детали между магнитом и деталью остается зазор.
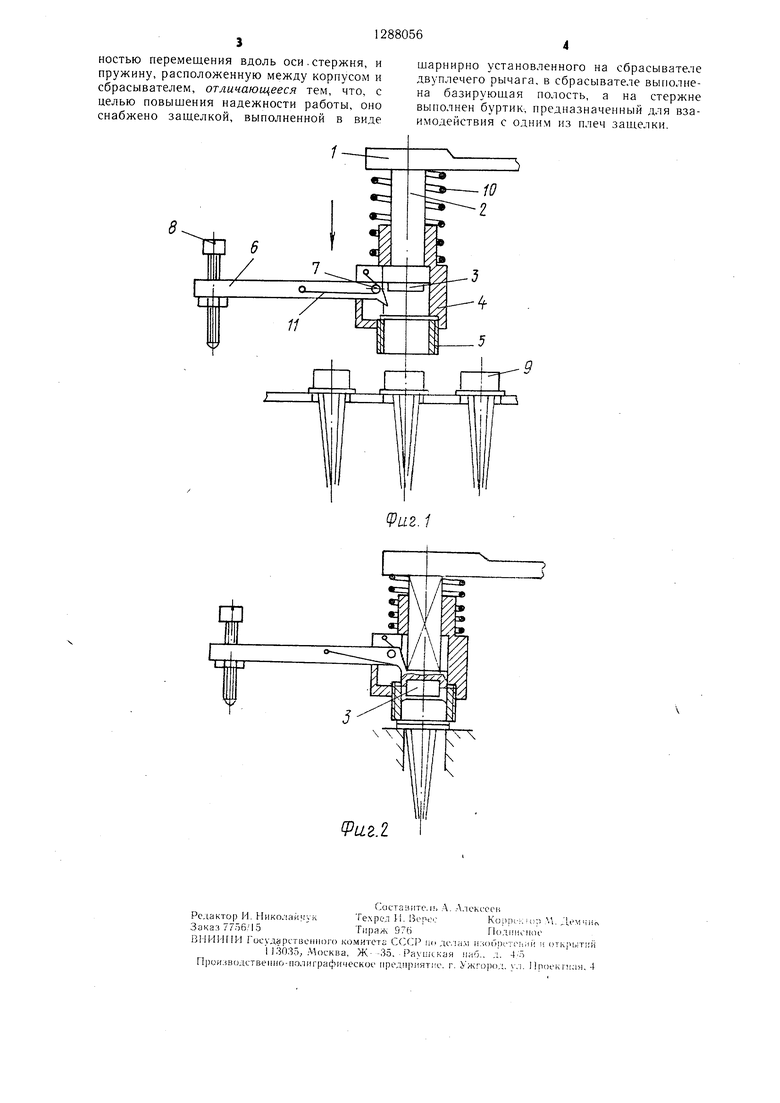
На фиг. 1 показано захватное устройство в исходном положении; на фиг. 2 - то же, в момент захвата детали; на фиг. 3 - то же, в момент выгрузки детали.
На корпусе 1 захватного устройства закреплен стержень 2 с буртиком и постоянным магнитом 3 на конце. На стержне 2 с возможностью перемещения вдоль его оси расположен сбрасыватель 4 со сменной насадкой 5 из неферромагнитного материала и защелкой 6 на оси 7. На длинном плече защелки 6 имеется регулирующий винт 8, позволяющий регулировать момент срабатывания защелки 6 и, следовательно, выгрузки захватываемой детали 9.
Сменная насадка 5 сбрасывателя 4 имеет базирующую полость, соответствующую форме захватываемой детали 9. Между щтан- гой 1 и сбрасывателем 4 на стержне 2 расположена пружина 10. Защелка 6 при необходимости снабжена пружиной 11. В мегте выгрузки детали расположен упор 2,вза0
имодействующий с защелкой 6 посредством регулировочного винта 8.
Захватное устройство работает следующим образом.
Корпус 1 захватного устройства, находясь над захватываемой деталью 9, начинает опускаться.
При этом (фиг. 1) сбрасыватель 4 под действием собственного веса или пружины 11 находится в нижнем крайнем положении.
После упора сбрасывателя 4 в деталь 9 он останавливается, а стержень 2 с магнитом 3 продолжает опускаться и нажимает на короткое плечо защелки 6. При этом защелка 6 поворачивается вокруг оси 7 и ее длинное плечо поднимается, а короткое опускается, освобождая полость для дальней- щего опускания стержня 2. По мере опускания стержня 2 до определенного уровня короткое плечо защелки 6 оказывается Бып.е буртика на стержне 2 и происходит фик- Q сация сбрасывателя 4 относительно стержня 2 (фиг. 2).
Опускание стержня 2 заканчивается тогда, когда захватываемая деталь 9 сближается с магнитом 3 и происходит захват детали 9.
После этого захватное устройство поднимается и переносит детали 9 в нужное место для выгрузки.
При опускании захватного устройства защелка 6 упирается винтом 8 в упор 12 и короткое плечо защелки 6 утапливается освобождая буртик стержня происходит расфиксация. В этот момент сбрасыватель 4 под действием собственного кеса или пружины 10 устремляется обратно в нижнее крайнее положение.
5
0
При захвате и выгрузке деталей, находящихся в горизонтальной п/юскости, устройство может работать без пружины 11. Это возможно благодаря тому, что длинное плечо защелки 6 с винтом под собственным весом удерживается в нижнем (фиг. 1-3) положении.
Если необходимо захватыва ь детали, находящиеся в вертикальной или потолочной плоскости, а также выгружать их в различном положении, заплелк) 6 1 еобходимо с помощью пружины 11 удерживать в нижнем (фиг. 1-3) положении.
Сбрасыватель 4 может быть выполнен составным. В этом случае сто пазируюпхая часть выполняется в виде |1асадки 5, соединяемой с направляюплей частью, например, с помощью резьбы.
Формула изобретения
Захватное устройство, содержащее закрепленный на корпусе стержень с постоянным магнитом, сбрасыватель из неферромагнитного материала,установленный с возможностью перемещения вдоль оси.стержня, и пружину, расположенную между корпусом и сбрасывателем, отличающееся тем, что, с целью повышения надежности работы, оно снабжено защелкой, выполненной в виде
щарнирно установленного на сбрасывателе двуплечего рычага, в сбрасывателе выполнена базирующая полость, а на стержне выполнен буртик, предназначенный для взаимодействия с одним нз плеч защелки.
8
i
иг. 1
(Риг.2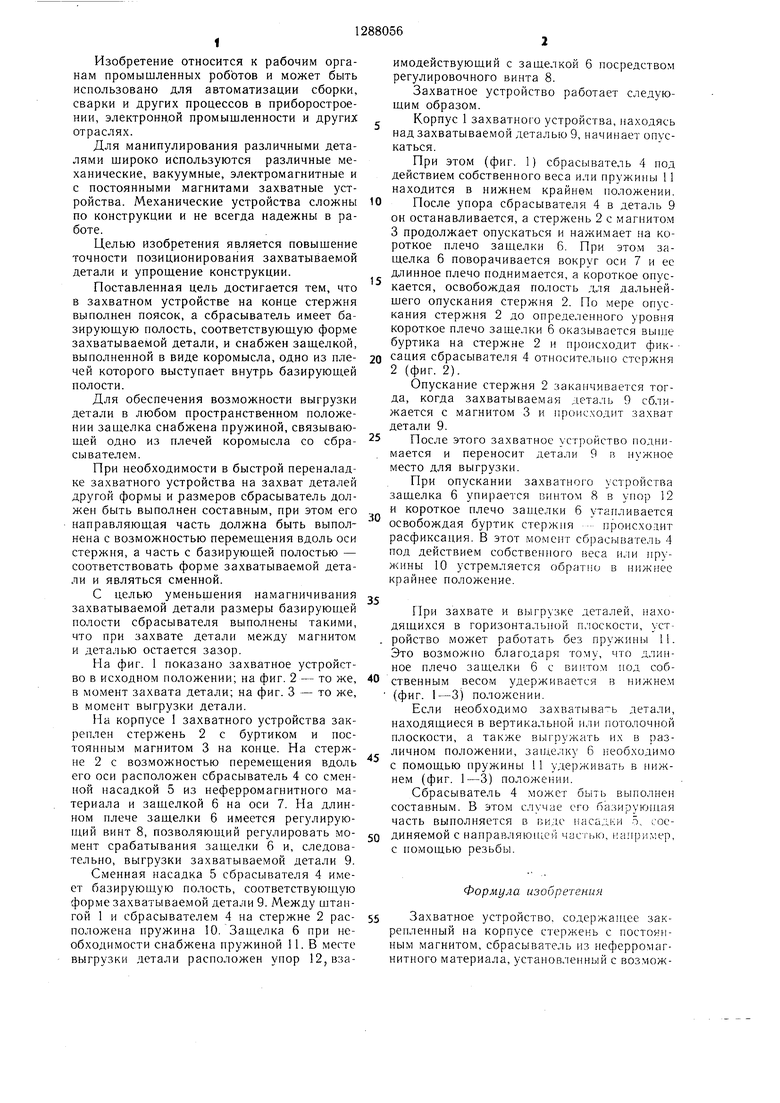
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1988 |
|
SU1794644A1 |
| Захватное устройство | 1985 |
|
SU1291393A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Захват для деталей с отверстиями | 1979 |
|
SU870112A1 |
| ПОДВЕСНОЙ АВТОМАТИЧЕСКИЙ ЗАХВАТНО-ЗАЖИМНОЙ ЛОВИТЕЛЬ | 2011 |
|
RU2474529C2 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| ГРУППОВОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1999 |
|
RU2170698C1 |
| Роторный автомат питания | 1987 |
|
SU1516305A1 |
| Захватный орган манипулятора | 1978 |
|
SU778876A1 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
Изобретение относится к рабочим органам промышленных роботов и может быть использовано для автоматизации сборки, сварки и других процессов. Целью изобретения является повышение надежности работы. Корпус 1 захватного устройства опускается на захватываемую деталь 9. При этом сбрасыватель 4 под действием пружинь 11 находится в нижнем крайнем положении. После упора сбрасывателя 4 в деталь 9 он останавливается, а стержень 2 с магнитом 3 продолжает перемепи1ться и нажимает на короткое плечо защелки 6, которая поворачивается вокруг оси 7. После того, как короткое плечо защелки 6 оказывается выше буртика на стержне 2, происходит фиксация сбрасывателя 4 относительно стержня 2. После этого захватное устройство поднимается и переносит деталь 9 в место выгрузки. При опускании захватного устройства защелка 6 упирается винтом 8 в упор 12 и короткое ее плечо утапливается, освобождая буртик стержня 2. В этот момент сбрасыватель 4 под действием пружины перемешается в крайнее нижнее положение, сбрасывая деталь 9. 3 ил. (С (Л N5 00 00 о ел С5 фиг.З
Г. оставитс.1, А. Алексеев
Редактор И. Нико. :аЙ1 укТе.хрел И. 5ересКо)1-}: io;) Л
Закаг 7756/15Тираж 976Полии чкте
В1-1ИИ 1И Государствегиклч) ко.митета по де..м iisoopeTi jiHH и открытии
| Подвеска для деталей,окрашиваемых способом электроосаждения | 1973 |
|
SU466915A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
