irxrM C d
(Л
ел
G СО О
|-сл
r.f
13 с равномерно закрепленными по его периферии захватными органами, выполненными в виде втулок 1 4,. установленных с возможностью перемещения по концентрическим пазам, выполненным в диске, магазин 19 с кассетами 20, установленными над диском с возможностью совмещения с втулками , и механизм выдачи, выполненный в виде вилки 2k, установленной с возможностью возвратно-поступательного перемещения в горизонтальной и вертикальной плоскостях и кинематически связанной с приводом вращения вала 1 посредством ползуна 27, штанги 29, двух кулачков 8 и 9 и доухплечего рычага 32. При вращении вала 1 втулка 1( фиксируется защелкой и удержива-- ется на месте, п ротор продолжает
вращение. Вилка 2k при опускании штанги 29 от кулачка 8 опускается и стопа деталей опускается во втулку I . Затем ползун 27 уходит в исходное положение, перемещая вилку 2k в горизонтальной плоскости, которая отсекает столб деталей, находящийся выше втулки l. При подъеме штанги 29 последняя воздействует на вилку 2, которая поднимает весь столб деталей, находящийся над втулкой 1, в которой остается определенное количество деталей. Вилка 2k освобождает путь
втулке Ik. Происходит расфиксация втулки 1 с кассетой 20. Втулка посредством пружины возвращается в исходное положение к началу концентрического паза. 1 з.п. ф-лы, k ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Загрузочный ротор | 1991 |
|
SU1816642A1 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Автомат для сборки дисковых цоколей стартеров | 1973 |
|
SU482829A1 |
| Технологический ротор роторно- КОНВЕйЕРНОй МАшиНы | 1978 |
|
SU793666A1 |
| Загрузочный ротор | 1988 |
|
SU1553314A1 |
| Загрузочный ротор | 1990 |
|
SU1780988A1 |
| Роторно-конвейерная машина | 1988 |
|
SU1574479A1 |
| Роторный автомат питания | 1986 |
|
SU1340982A1 |
| Загрузочное устройство | 1991 |
|
SU1815134A1 |
Изобретение относится к автоматическим загрузочным устройствам роторного типа и может быть использовано преимущественно в роторно-конвейерных линиях. Целью изобретения является повышение надежности и производительности роторного автомата питания путем обеспечения подачи пакета деталей типа магнитопроводов в захватные органы ротора и исключение заклинивания при передаче деталей. Роторный автомат питания содержит вал 1, смонтированный на основании 2 с возможностью вращения, и закрепленный на нем диск 13 с равномерно закрепленными по его периферии захватными органами, выполненными в виде втулок 14, установленных с возможностью перемещения по концентрическим пазам, выполненным в диске, магазин 19 с кассетами 20, установленных над диском с возможностью совмещения с втулками 14, и механизм выдачи, выполненный в виде вилки 24, установленной с возможностью возвратно-поступательного перемещения в горизонтальной и вертикальной плоскостях и кинематически связанной с приводом вращения вала 1 посредством ползуна 27, штанги 29, двух кулачков 8 и 9 и двуплечего рычага 32. При вращении вала 1 втулка 14 фиксируется защелкой и удерживается на месте, а ротор продолжает вращение. Вилка 24 при опускании штанги 29 от кулачка 8 опускается и стопа деталей опускается во втулку 14. Затем ползун 27 уходит в исходное положение, перемещая вилку 24 в горизонтальной плоскости, которая отсекает столб деталей, находящийся выше втулки 14. При подъеме штанги 29 последняя воздействует на вилку 24, которая поднимает весь столб деталей, находящийся над втулкой 14, в которой остается определенное количество деталей. Вилка 24 освобождает путь втулке 14. Происходит расфиксация втулки 14 с кассетой 20. Втулка 14 посредством пружины возвращается в исходное положение к началу концентрического паза. 1 з.п. ф-лы, 4 ил.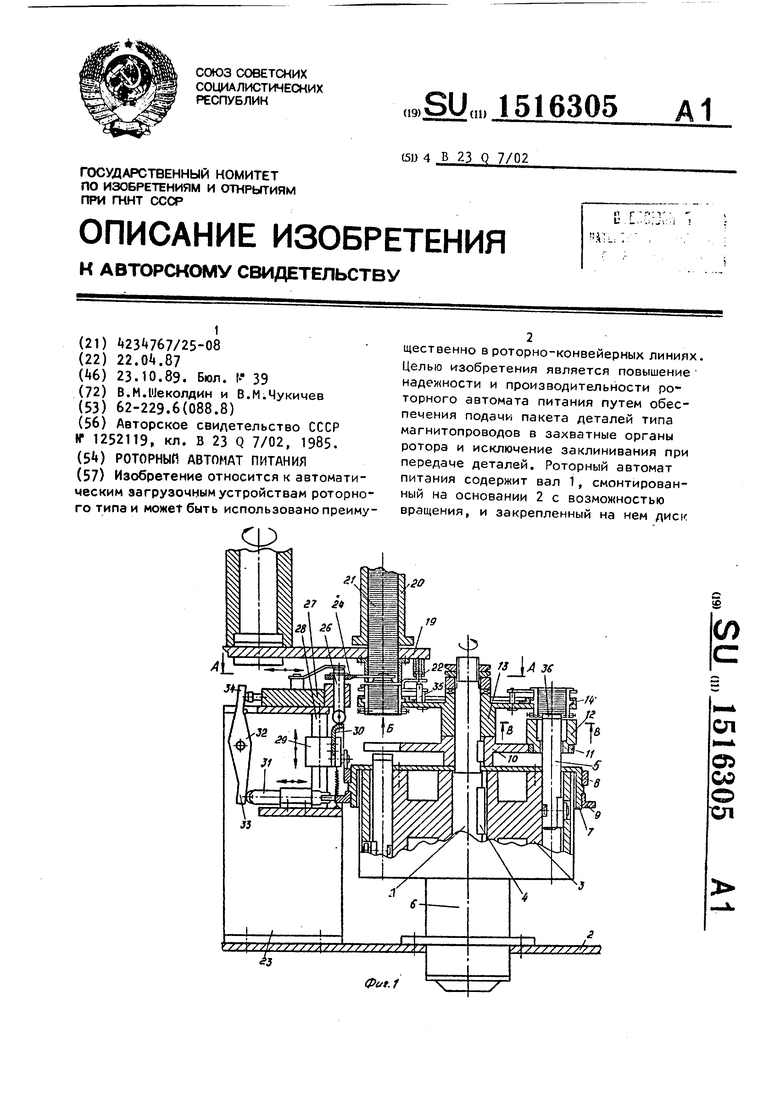
Изобретение относится к автомати- ческим загрузочным устройствам роторного типа и может быть использовано преимущественно в роторно-конвейер- ных линиях.
Цель изобретения - повышение на- дежиости и производительности роторного автомата питания путем обеспечения подачи пакета деталей типа маг- нитопроводов в захватные органы ротора и исключение заклинивания при пе- редаче деталей.
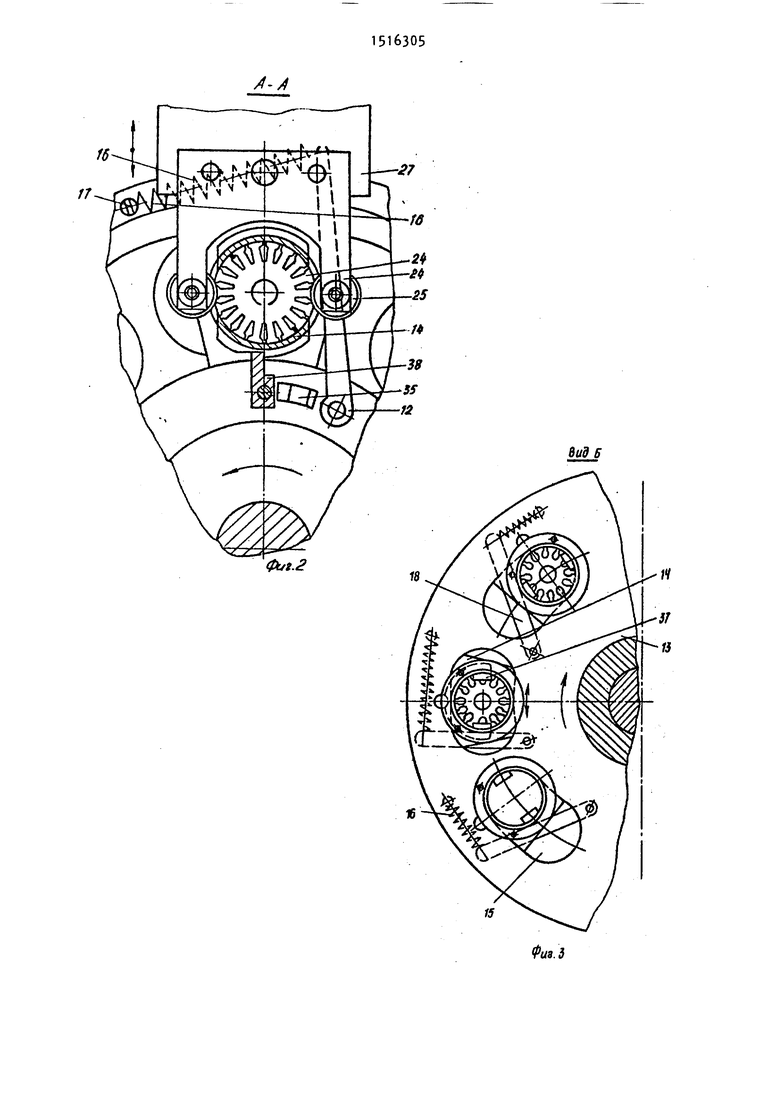
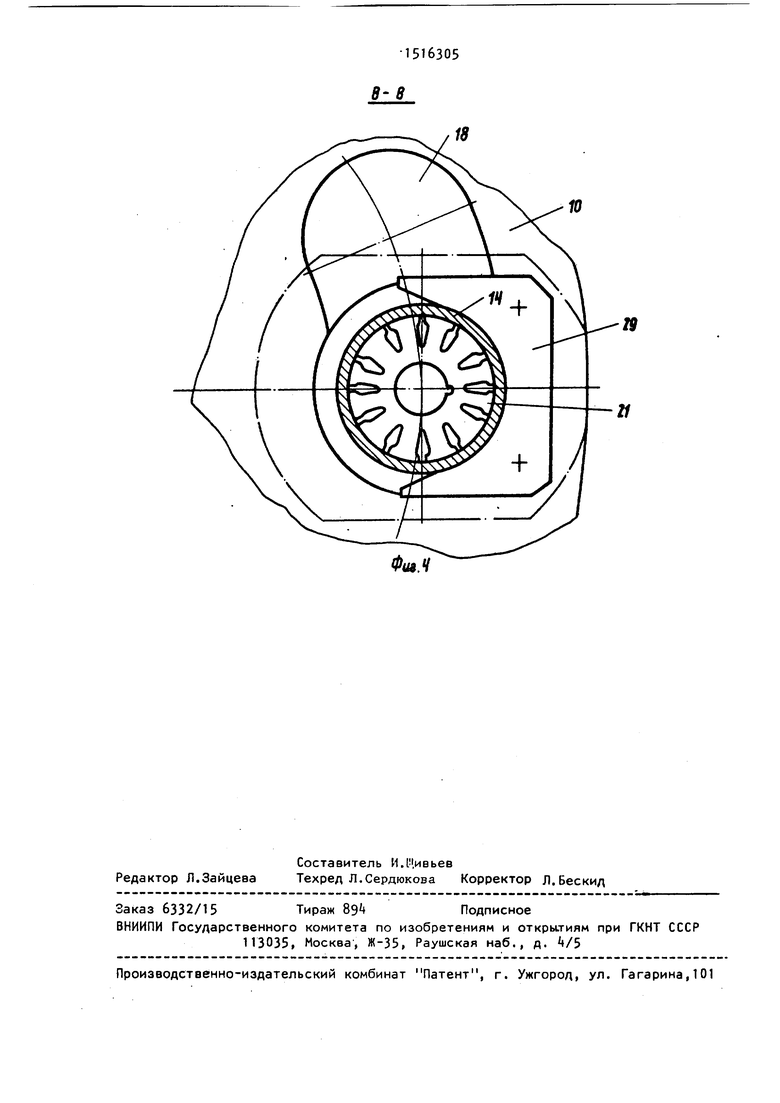
Па фиг.1 изображен роторный авто- мат питания, общий вид, продольный разрез, на фиг.2 - разрез А-Л на фиг.1; на фиг.З - вид Б на фиг. на фиг. - разреа D-B на фиг.1.
Роторный автомат питания содержит вал 1, смонтированный на основании 2 с возможностью вращения от привода (не показан). На налу 1 закреплен ба- рабан 3 посредством шпонки ( с размещенными в нем ползунами 5. Барабан 3 установлен в стакане 6, смонтированном на основании 2. На барабане 3 закреплена к рышка 7, на боковой поверх- ности которой установлены кулачки 8 и 9. Над барабаном 3 на валу 1 закреплена звездочка 10, огибаемая цепным конаейером 11 с носителями 12 изделий. Над звездочкой 10 на валу 1 закреплен диск 13 с равномерно расположенными на его периферии захватными органами, выполненными в виде втулок k. Втулки 1 установлены в диске 13 в концентрических пазах 15 с возможностью перемещения в последних. Втулки 1 подпружинены пружиной 1б относительно диска 13 в плоскости их перемещения. Один конец пружины 1б закреплен на оси 17, а другой - на конце рычага 18, предназначенного для возврата втулки Т в исходное положение. Над диском 13 на основании 2 смонтирован магазин 19 с кассетами 20. В кассетах 20 находятся детали 21. Одна из кассет всегда устанавливается с возможностью совмещения с захватными органами, и ось ее пар.аллельна оси вала. На магазине 19 смонтирована защелка 22 для фиксации втулок I с кассетой 20. На основании 2 смонтирован механизм выдачи деталей 21 из магазина 19. Механизм выдачи установлен на кронштейне 23, закрепленном на основании 2, и содержит вилку 2k, на концах которой смонтированы ролики 25. Вилка 2k смонтирована на итоке 26, который установлен в ползуне 27. На стойке 28, смонтированной на кронштейне 23, установлена штанга 29 с возможностью перемещения в вертикальной плоскости и взаимодействия с кулачком В. На штанге 29 установлен упор 30 с возможностью взаимодействия со штоком 26. На кронштейне 23 так же смонтирован шток 31 и двуплечий рычаг 32. Причем шток 31 установлен с возможностью взаимодействия с кулачком 9 и плечом 33
515163056
двуплечего рычага 32 и второе плечо образом. При обеспечении соосного по- 34 установлено с возможностью взаимо- ложения втулки 1, пол«яуна 5 и носи
действия с ползуном 27. На диске 13 перед каждым захватным органом смонтированы кулачки 35. На торце каждого ползуна 5 смонтирована магнитная накладка Зб, а в каждой втулке 14 с нижней стороны для удержания пакета смонтированы губки 37. На дис ке 13 перед каждым захватом смонтирована защелка 38.
Роторный автомат питания работает следующим образом.
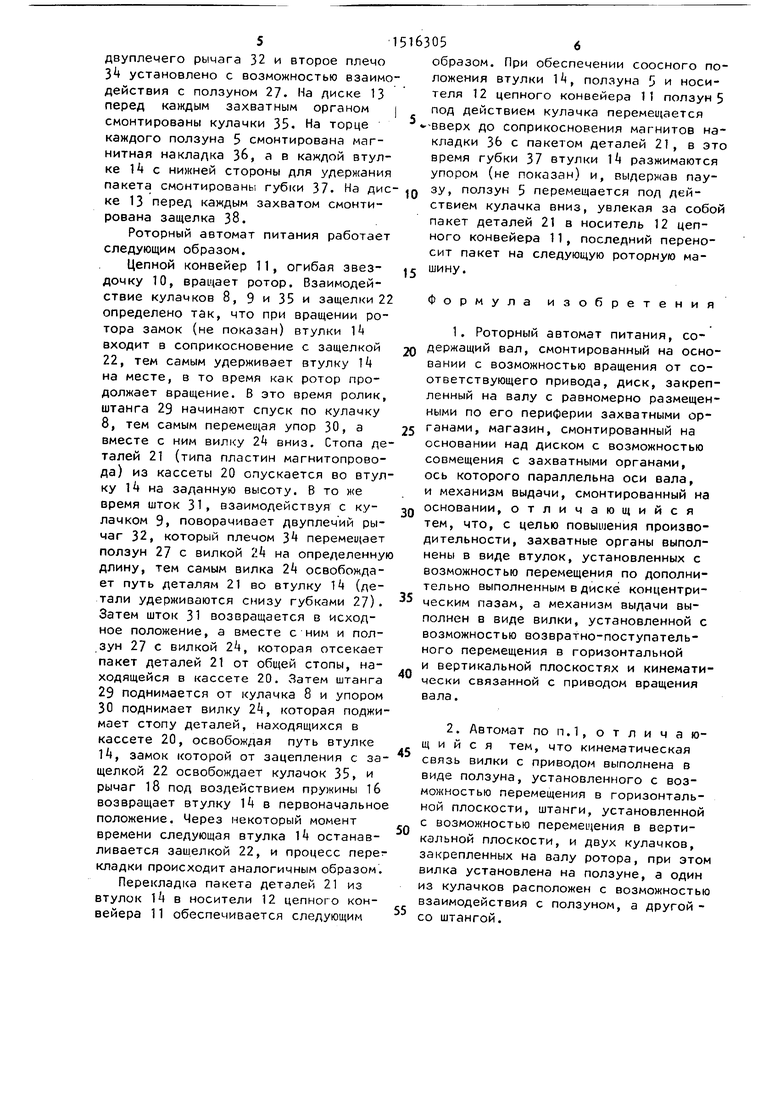
Цепной конвейер 11, огибая звездочку 10, вра1чает ротор. Взаимодействие кулачков 8, 9 и 35 и защелки 22 определено так, что при вращении ротора замок (не показан) втулки 14 входит в соприкосновение с защелкой 22, тем самым удерживает втулку 14 на месте, в то время как ротор продолжает вращение. В это время ролик, штанга 29 начинают спуск по кулачку 8, тем самым перемещая упор 30, а вместе с ним вилку 24 вниз. Стопа деталей 21 (типа пластин магнитопрово- да) из кассеты 20 опускается во втулку 14 на заданную высоту. В то же время шток 31, взаимодействуя с кулачком 9 поворачивает двуплечий рычаг 32, который плечом 34 перемеи;ает ползун 27 с вилкой 24 на определенну длину, тем самым вилка 24 освобождает путь деталям 21 во втулку 14 (детали удерживаются снизу губками 27) Затем шток 31 возвращается в исходное положение, а вместе с ним и ползун 27 с вилкой 24, которая отсекает пакет деталей 21 от общей стопы, находящейся в кассете 20. Затем штанга
29поднимается от кулачка 8 и упором
30поднимает вилку 24, которая поджимает стопу деталей, находящихся в кассете 20, освобождая путь втулке 14, замок которой от зацепления с защелкой 22 освобождает кулачок 35, и рычаг 18 под воздействием пружины 1б возвращает втулку 14 в первоначально положение. Через некоторый момент времени следующая втулка 14 останавливается защелкой 22, и процесс перекладки происходит аналогичным образом.
Перекладка пакета деталей 21 из втулок 14 в носители 12 цепного конвейера 11 обеспечивается следующим
5
0
5
Q
0
5
0
5
0
5
теля 12 цепного конвейера 11 ползун 5 под действием кулачка перемещается --вверх до соприкосновения магнитов накладки ЗЬ с пакетом деталей 21, в это время губки 37 втулки 14 разжимаются упором (не показан) и, выдержав паузу, ползун 5 перемещается под действием кулачка вниз, увлекая за собой пакет деталей 21 в носитель 12 цепного конвейера 11, последний переносит пакет на следующую роторную машину.
Формула изобретения
ось которого параллельна оси вала, и механизм выдачи, смонтированный на основании, отличающийся тем, что, с целью повышения производительности, захватные органы выполнены в виде втулок, установленных с возможностью перемещения по дополнительно выполненным в диске концентрическим пазам, а механизм выдачи выполнен в виде вилки, установленной с возможностью возвратно-поступательного перемещения в горизонтальной и вертикальной плоскостях и кинематически связанной с приводом вращения вала.
16
Фи9.2
27
fd
Вид Б
18
15
10
л
Фш.Ч
| Загрузочное устройство | 1985 |
|
SU1252119A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
