(54) ЗАХВАТ МАНИПУЛЯТОРА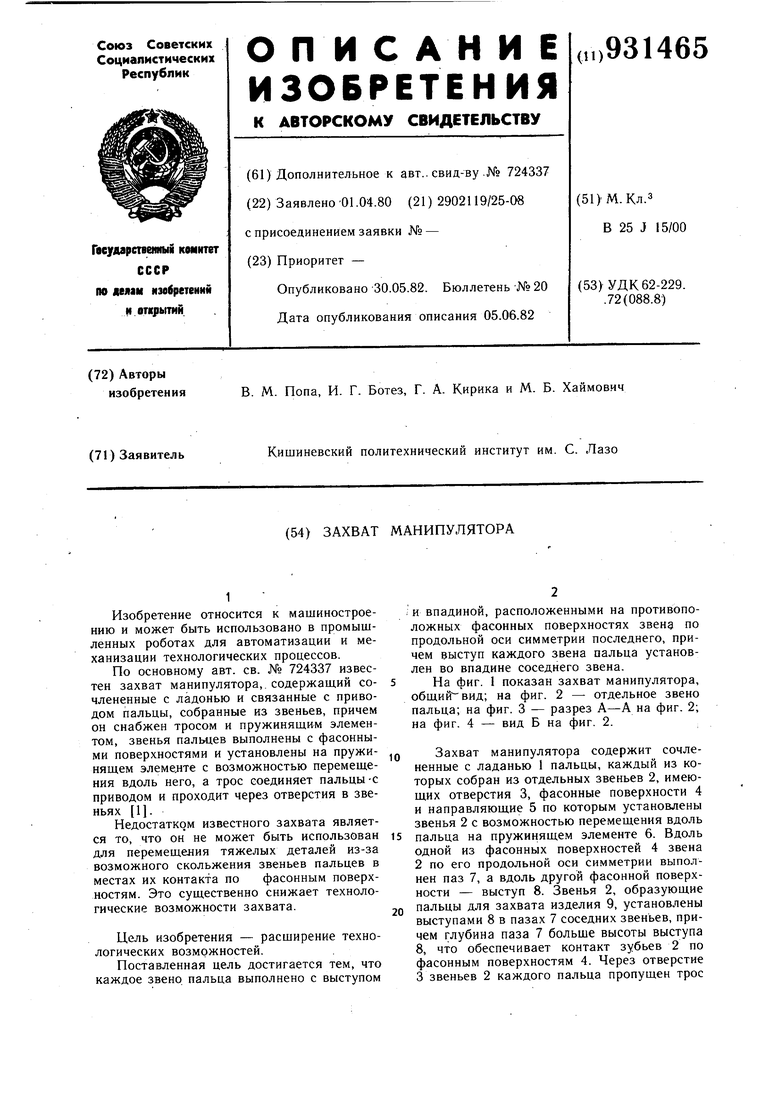
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1981 |
|
SU992181A2 |
| Захват манипулятора | 1982 |
|
SU1066800A2 |
| Схват манипулятора | 1982 |
|
SU1060466A2 |
| Захват манипулятора | 1978 |
|
SU724337A1 |
| Захват манипулятора | 1983 |
|
SU1191284A1 |
| Захват манипулятора | 1982 |
|
SU1034897A2 |
| Захват манипулятора | 1985 |
|
SU1288057A1 |
| Захват манипулятора | 1983 |
|
SU1133086A2 |
| Захват манипулятора | 1979 |
|
SU910410A2 |
| Захватное устройство манипулятора | 1987 |
|
SU1521581A1 |
1
Изобретение относится к машиностроению и может быть использовано в промышленных роботах для автоматизации и механизации технологических процессов.
По основному авт. св. № 724337 известен захват манипулятора,. содержаш,ий сочлененные с ладонью и связанные с приводом пальцы, собранные из звеньев, причем он снабжен тросом и пружинящи м элементом, звенья пальцев выполнены с фасонными поверхностями и установлены на пружинящем элеме.нте с возможностью перемещения вдоль него, а трос соединяет пальцы -с приводом и проходит через отверстия в звеньях 1.
Недостатком известного захвата является то, что он не может быть использован для перемещения тяжелых деталей из-за возможного скольжения звеньев пальцев в местах их контакта по фасонным поверхностям. Это существенно снижает технологические возможности захвата.
Цель изобретения - расщирение технологических возможностей.
Поставленная цель достигается тем, что каждое звено, пальца выполнено с выступом
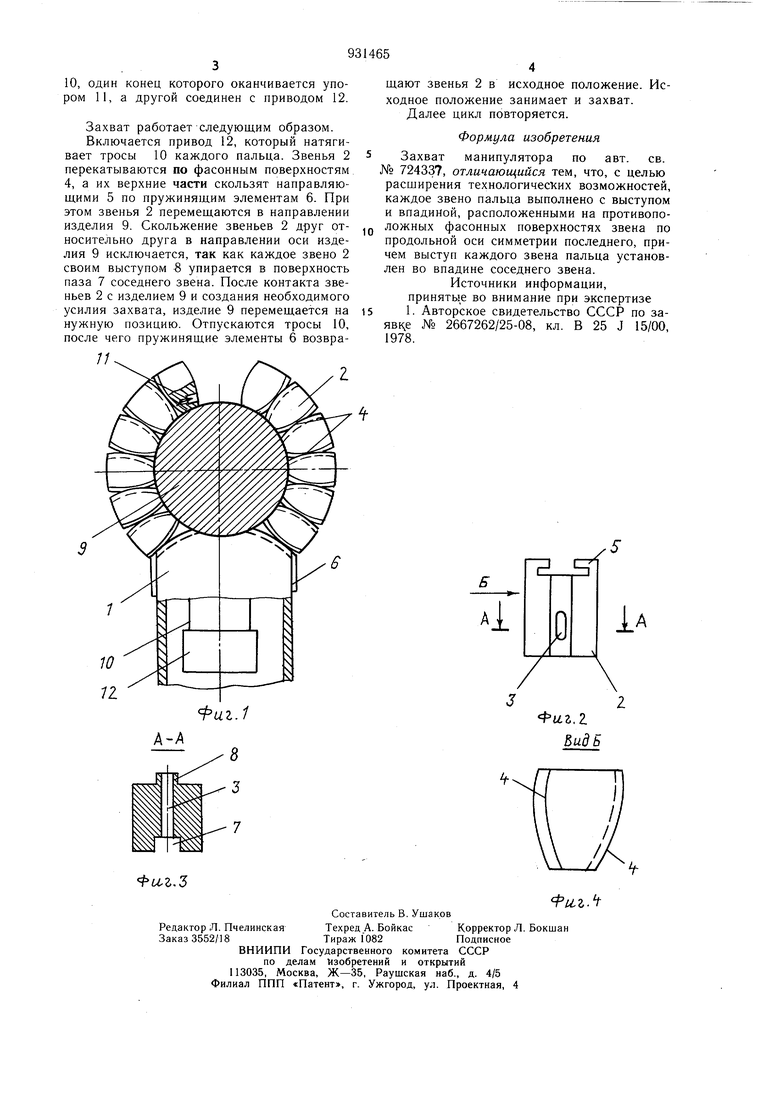
и впадиной, расположенными на противоположных фасонных поверхностях звена по продольной оси симметрии последнего, причем выступ каждого звена пальца установлен во впадине соседнего звена. 5 На фиг. 1 показан захват манипулятора, oбщи вид; на фиг. 2 - отдельное звено пальца; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - вид Б на фиг. 2.
1Q Захват манипулятора содержит сочлененные с ладанью 1 пальцы, каждый из которых собран из отдельных звеньев 2, имеющих отверстия 3, фасонные поверхности 4 и направляющие 5 по которым установлены звенья 2 с возможностью перемещения вдоль
15 пальца на пружинящем элементе 6. Вдоль одной из фасонных поверхностей 4 звена
2по его продольной оси симметрии выполнен паз 7, а вдоль другой фасонной поверхности - выступ 8. Звенья 2, образующие
20 пальцы для захвата изделия 9, установлены выступами 8 в пазах 7 соседних звеньев, причем глубина паза 7 больше высоты выступа 8, что обеспечивает контакт зубьев 2 по фасонным поверхностям 4. Через отверстие
3звеньев 2 каждого пальца пропущен трос
