Изобретение относится к машиностроению и может быть использовано при создании промьшшенных роботов.
Целью изобретения является повышение производительности промьшлен- ного робота за счет уменьшения инерционности иСполнительнь х органов и упрощение его конструкции.
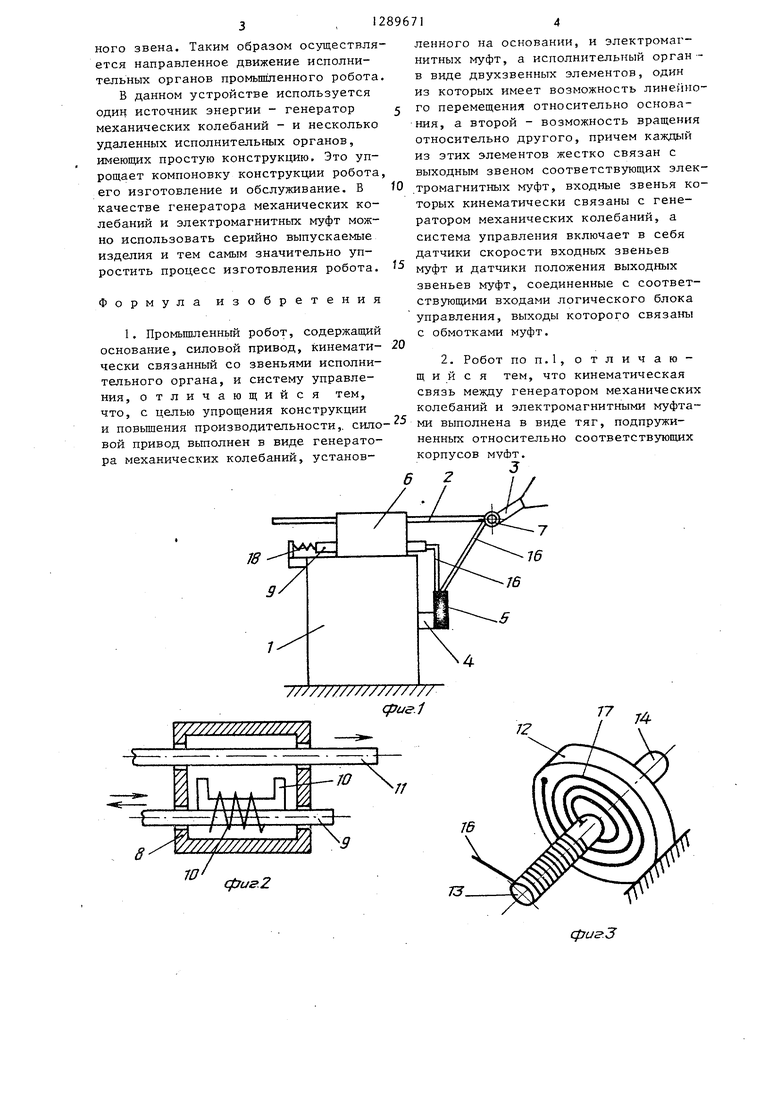
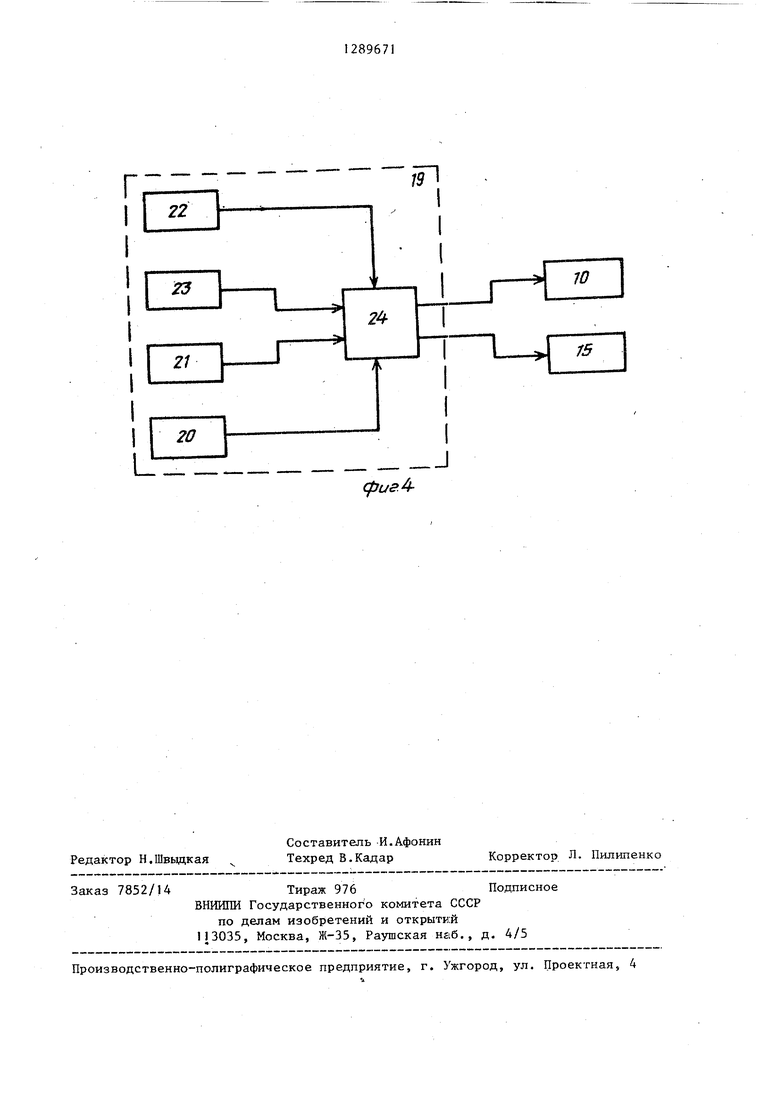
На фиг.1 показан промьшшенный робот, общий вид; на фиг.2 - электромагнитная муфта для линейного перемещения, разрез; на фиг.З - электромагнитная муфта для вращения; на фиг.4 - функциональная схема системы управле 1дая.
Промьпиленный робот содержит испол нителыаш орган из двухзвенных элементов. Элемент линейного перемещения состоит из основания 1 робота и выходного звена 2, совершающего линейные перемещения. Элемент вращения состоит из звена 2 и поворотного ры- ,чага 3. Для увеличения числа степеней свободы можно увеличить число двухзвенных элементов.
Исполнительные органы снабжены приводами, вьтолненными в виде генератора механических колебаний 4, например крутильных, содержащего выходное звено 5, и электромагнитных ryфт. Для элемента линейного перемещения предназначена муфта 6, а для элемента вращения - муфта 7. Муфта 6 содержит корпус 8, в котором размещено входное звено 9, снабженное электромагнитом с обмоткой управления 10, и выходное звено 11 из ферромагнитного материала. Муфта 7 содержит корпус 12, входное звено 13 и выходное звено 14. Для сил.овой связи входного и выходного звеньев слу;кит элек тромагнит, размещенный в корпусе, имеющий выводы обмотки управления 15.
Входное звено 9 муфты 6 и входное звено 13 муфты 7 соединены нос- средством кинематической связи 16 с выходным звеном 5 генератора механических колебаний 4. Эти кинематические связи могут быть разного исполнения, например в виде жесткого стержня 11ли гибкой тяги. Если при работе промышленного робота происходит удаление входного звена 13 муфты 7 от выходного звена 5 генератора механических колебаний 4, то тяга должна быть подпружинена, например, спиральной пружиной 17 относительно корпуса муфты 7, Это можно
сделать, подпружинив входное звено 13 относительно корпуса 12. При этом тяга 16 всегда передает вибрацию на входное звено 13 независимо от изменения ее длины. Для более надежного возврата входного звена 9 в исходное состояние, если тяга нежесткая, молшо использовать пружину 18. Обмотки управления 10, 15 муфт
соединены с системой управления 19. Последняя включает датчики,20,21 скорости входных звеньев муфт 6,7, датчики 22, 23 положения выходных звеньев муфт и логический блок 24 управления. Б качестве блока 24 можно использовать микропроцессорную систему управления, например, на ЭВМ Электроника-60. К входам блока 24 подсоединены ВЫХОДЕ) датчиков 20,
21 скорости и датчиков 22, 23 положения ,
В качестве датчиков 20,21 скорости удобнее использовать индуктивные датчики, сигноЛ с которых при изменении направления движения контролируемого звена меняет знак,
В качестве датчиков 22, 23 положения можно использовать любые датчики - индуктивные, оптические и т.д.
Промышленный робот работает следующим образом.
Генератор 4 генерирует механичес- |Кие колебания. С его выходного звена 5 колебания, через тяги поступают на
входные звенья 9, 13 муфт 6 и 7 . Последние совершают колебания соответственно звено 9 - линейные звено 13 - крутильные. Б логический блок управления с датчика 20 поступает информапдя о знаке линейной скорости звена 9, а с датчика 21 информация о знаке угловой скорости звена 13. Одновременно с датчиков 22, 23 положения поступает напряжение, величина
которого пропорциональна действительному положению соответствующих звеньев. В блоке 24 сигналы с датчиков положения сравниваются с сигналами задания и разностный сигнал по величине и знаку является основанием для включения или выключения соответствующих муфт.
Блок 24 Д.ПЯ каждой муфты при совпадении знаков, поступающих с ее звеньев, сигналов выдает управляющий импульс на соответствующие обмотки муфт. При включении муфты ее выходное звено совершает дискретное перемещение в направлении движения входного звена. Таким образом осуществляется направленное движение исполнительных органов промьшшенного робота
В данном устройстве используется один источник энергии - генератор механических колебаний - и несколько удаленных исполнительных органов, имеющих простую конструкцию. Это упрощает компоновку конструкции робота его изготовление и обслуживание. В качестве генератора механических колебаний и электромагнитных муфт можно использовать серийно выпускаемые изделия и тем самым значительно упростить процесс изготовления робота.
Формула изобретения
1. Промышленный робот, содержащий основание, силовой привод, кинемати- чески связанный со звеньями исполнительного органа, и систему управления, отличающийся тем, что, с целью упрощения конструкции и повьппения производительности,, силовой привод выполнен в виде генератора механических колебаний, установ
ленного на основании, и электромагнитных муфт, а исполнительный орган- в виде двухзвенных элементов, один из которых имеет возможность линейного перемещения относительно основания, а второй - возможность вращения относительно другого, причем каждый из этих элементов жестко связан с выходным звеном соответствующих элек- .тромагнитных муфт, входные звенья которых кинематически связаны с генератором механических колебаний, а система управления включает в себя датчики скорости входных звеньев муфт и датчики положения выходных звеньев муфт, соединенные с соответствующими входами логического блока управления, выходы которого связаны с обмотками муфт.
2. Робот ПОП.1, отличающийся тем, что кинематическая связь между генератором механических колебаний и электромагнитными муфтами выполнена в виде тяг, подпружиненных относительно соответствующих
корпусов МУФТ.
/////////////777///
дуиг.1
/////7//////////. фи.2
,
12
eft иг. 4Редактор Н.Швьщкая
Составитель И.Афонин Техред В.Кадар
Заказ 7852/14
Тираж 976Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Л. Пилипенко
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2239576C2 |
| Копирующий манипулятор | 1979 |
|
SU812562A1 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| Резонансный манипулятор | 2024 |
|
RU2840440C1 |
| Электропневматический позиционный следящий привод | 1976 |
|
SU596739A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| Способ приработки двигателя внутреннего сгорания и устройство для его осуществления | 1989 |
|
SU1837193A1 |
| Стенд для испытания одноколейных транспортных средств | 1989 |
|
SU1672264A1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2106265C1 |
Изобретение относится к области робототехники. Цель изобретения - повьшение производительности и упрощение устройства. Промышленный, робот содержит силовой привод, установленный на основании и выполненный в виде генератора механических колебаний и электромагнитных муфт. Входное звено каждой муфты кинематически связано с генератором механических колебаний. Обмотки управления муфт соединены с системой управления, которая содержит датчики скоростей входных звеньев муфт, датчики положения выходных звеньев муфт и логический блок управления, выходы которого соединены с обмотками муфт, а к входам подсоединены выходы датчиков скорости и положения. С выходными звеньями муфт жестко связаны соответствующие элементы исполнительного органа робота. 4 ил. S сл к оо О) 
| Промышленный робот | 1980 |
|
SU931463A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
