Изобретение относится к подъемно-транспортному машиностроению, в частности к те- лесконическим захватам кранов-штабелеров.
Целью изобретения является повышение долговечности.
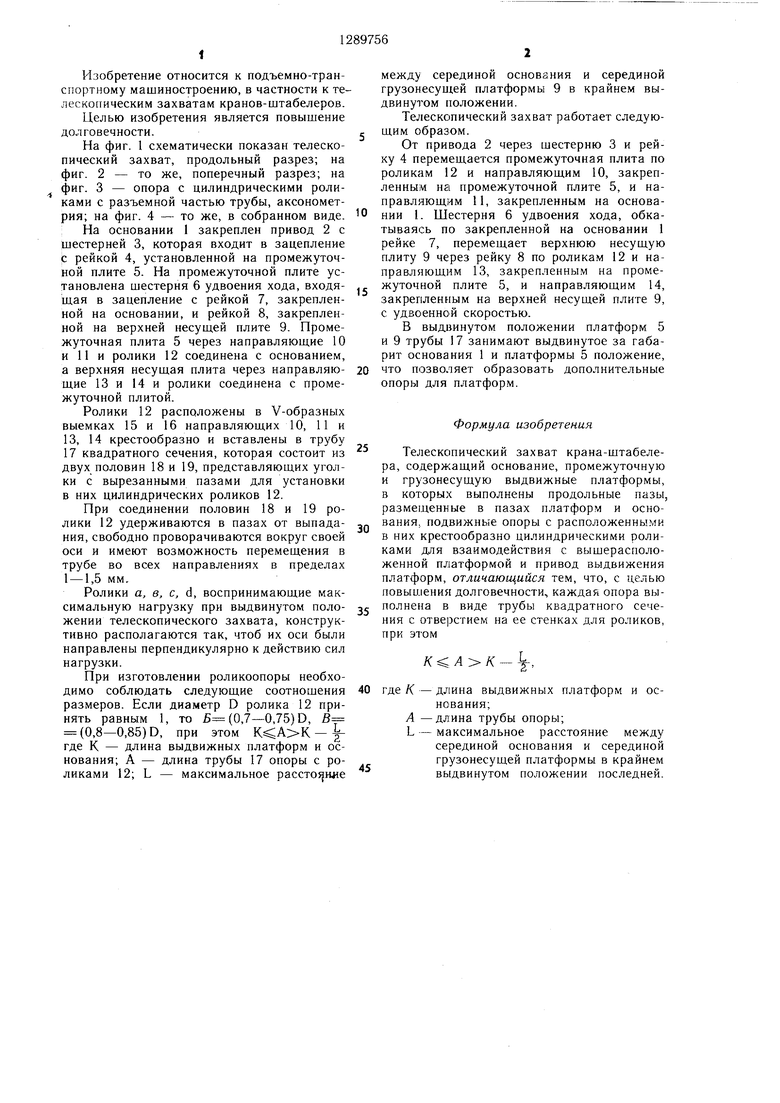
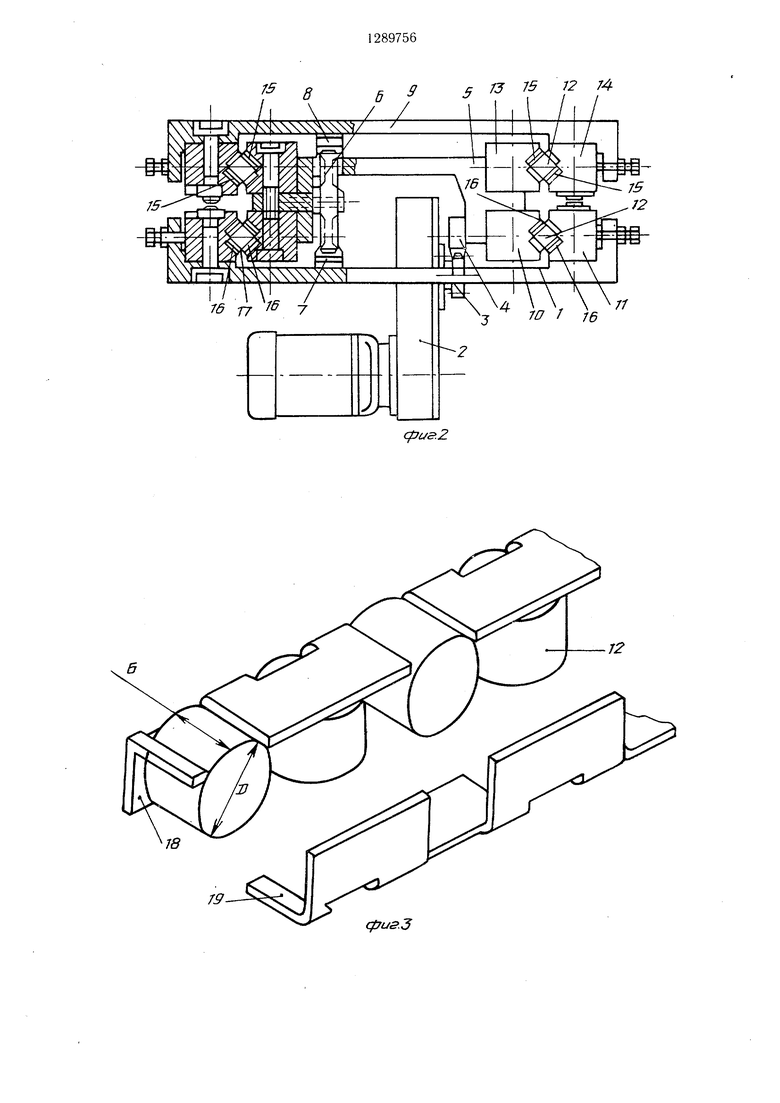
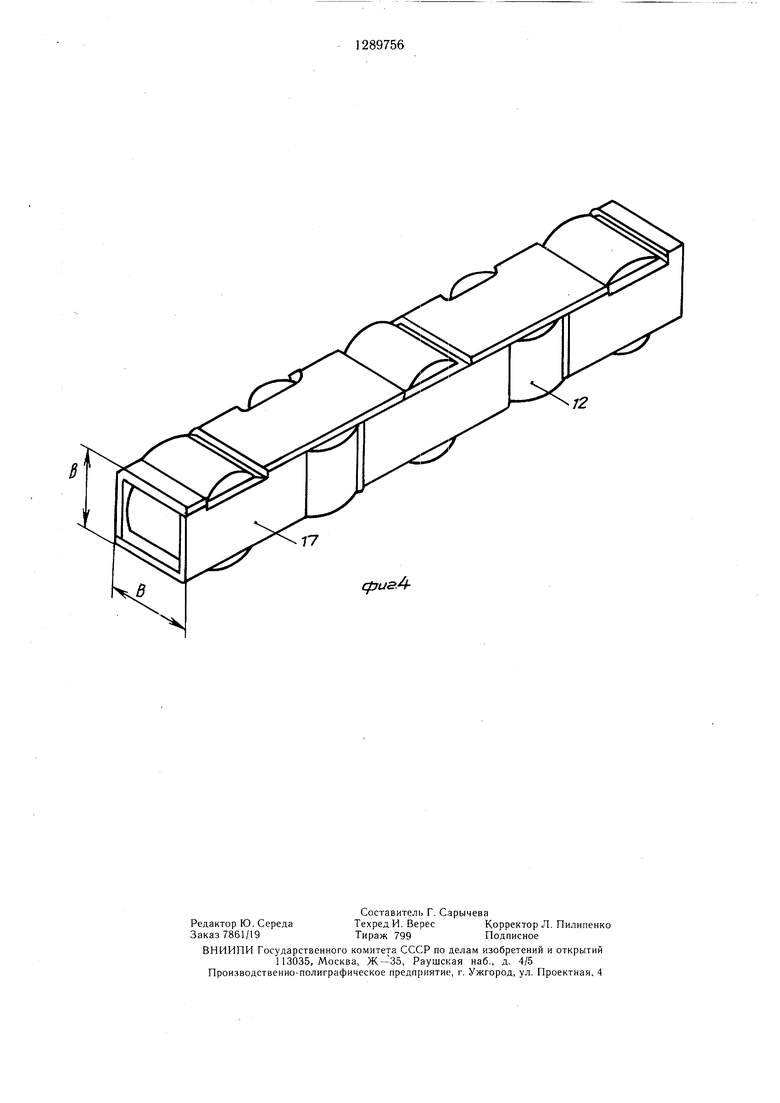
На фиг. 1 схематически показан телескопический захват, продольный разрез; на фиг. 2 - то же, поперечный разрез; на фиг. 3 - опора с цилиндрическими роликами с разъемной частью трубы, аксонометрия; на фиг. 4 - то же, в собранном виде.
На основании 1 закреплен привод 2 с шестерней 3, которая входит в зацепление с рейкой 4, установленной на промежуточной плите 5. На промежуточной плите установлена шестерня 6 удвоения хода, входящая в зацепление с рейкой 7, закрепленной на основании, и рейкой 8, закрепленной на верхней несуш,ей плите 9. Промежуточная плита 5 через направляюш.ие 10 и 11 и ролики 12 соединена с основанием, а верхняя несущая плита через направляющие 13 и 14 и ролики соединена с промежуточной плитой.
Ролики 12 расположены в V-образных выемках 15 и 16 направляющих 10, 11 и 13, 14 крестообразно и вставлены в трубу 17 квадратного сечения, которая состоит из двух половин 18 и 19, представляюш,их уголки с вырезанными пазами для установки в них цилиндрических роликов 12.
При соединении половин 18 и 19 ролики 12 удерживаются в пазах от выпадания, свободно проворачиваются вокруг своей оси и имеют возможность перемещения в трубе во всех направлениях в пределах 1 -1,5 мм.
Ролики а, в, с, d, воспринимающие максимальную нагрузку при выдвинутом положении телескопического захвата, конструктивно располагаются так, чтоб их оси были направлены перпендикулярно к действию сил нагрузки.
При изготовлении роликоопоры необходимо соблюдать следующие соотношения размеров. Если диаметр D ролика 12 принять равным 1, то (0,7-0,75) D, S (0,8-0,85) D, при этом - где К - длина выдвижных платформ и основания; А - длина трубы 17 опоры с роликами 12; L - максимальное paccTOjjH«e
между серединой основания и серединой грузонесущей платформы 9 в крайнем выдвинутом положении.
Телескопический захват работает следующим образом.
От привода 2 через шестерню 3 и рейку 4 перемещается промежуточная плита по роликам 12 и направляющим 10, закрепленным на промежуточной плите 5, и направляющим И, закрепленным на основаНИИ 1. Шестерня 6 удвоения хода, обкатываясь по закрепленной на основании 1 рейке 7, перемещает верхнюю несушую плиту 9 через рейку 8 по роликам 12 и направляющим 13, закрепленным на промежуточной плите 5, и направляющим 14, закрепленным на верхней несущей плите 9, с удвоенной скоростью.
В выдвинутом положении платформ 5 и 9 трубы 17 занимают выдвинутое за габарит основания 1 и платформы 5 положение,
что позволяет образовать дополнительные опоры для платформ.
Формула изобретения
Телескопический захват крана-штабеле- ра, содержащий основание, промежуточную и грузонесущую выдвижные платформы, в которых выполнены продольные пазы, размещенные в пазах платформ и основания. подвижные опоры с расположенными в них крестообразно цилиндрическими роликами для взаимодействия с вышерасположенной платформой и привод выдвижения платформ, отличающийся тем, что, с целью повышения долговечности., каждая опора выполнена в виде трубы квадратного сечения с отверстием на ее стенках для роликов, при этом
,
где К - длина выдвижных платформ и основания;
А -длина трубы опоры; L - максимальное расстояние между серединой основания и серединой грузонесущей платформы в крайнем выдвинутом положении последней.
/
с- ГЗ 15 12 74
/ /
Р
J 4 V/ -7 / 7(5
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический захват | 1986 |
|
SU1463646A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Установка для упаковки рулонов на поддоне | 1979 |
|
SU861174A1 |
| Телескопический захват крана-штабелера | 1975 |
|
SU613980A1 |
| Телескопический захват (его варианты) | 1982 |
|
SU1104061A1 |
| Телескопический захват | 1988 |
|
SU1652215A1 |
| Телескопический захват | 1987 |
|
SU1442471A1 |
| Захват к крану-штабелеру | 1980 |
|
SU992418A1 |
| Телескопический захват | 1979 |
|
SU863510A1 |
Изобретение относится к телескопическим грузозахватам кранов-штабелеров и позволяет повысить их долговечность. Захват содержит основание 1 и выдвижные от привода платформы 5 и 9. В V-образных пазах основания 1 и платформ 5 и 9 размещены опоры с цилиндрическими роликами 12. Каждая опора выполнена в виде трубы 17 квадратного сечения. Ролики 12 в трубе 17 размещены крестообразно. При выдвижении платформ 5 и 9 последние обкатываются по роликам 12 с удвоенной скоростью, при этом трубы 17 выходят за габарит основания 1 и платформы 5 и поддерживают соответственно платформы 5 и 9. 4 ил. d (Л С /у фиг.1 to 00 со СП О5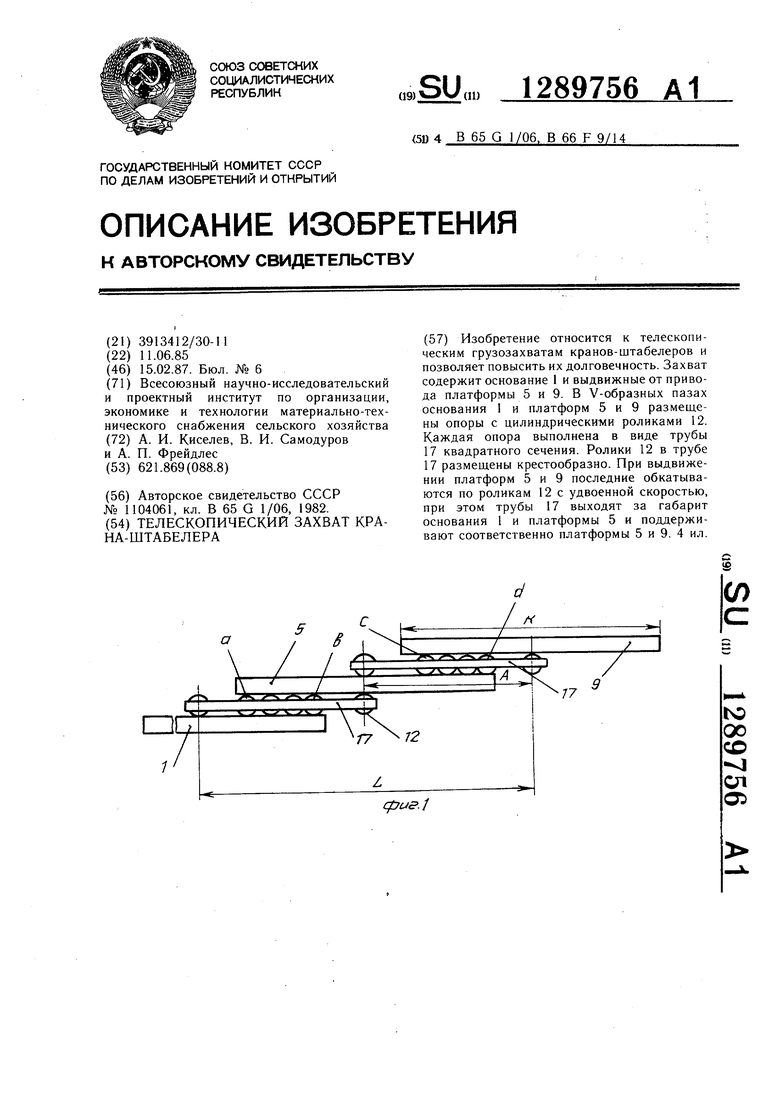
cfJua.Z
79
72
фиё.З
12
(риг.4
| Телескопический захват (его варианты) | 1982 |
|
SU1104061A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
