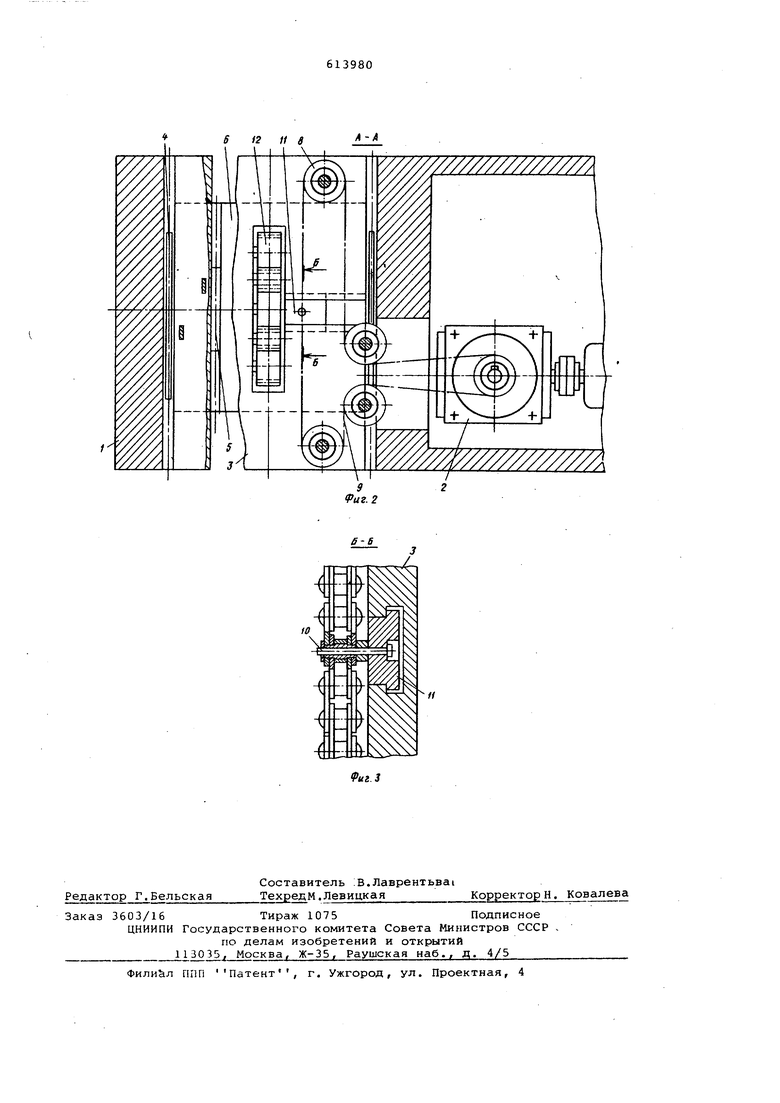
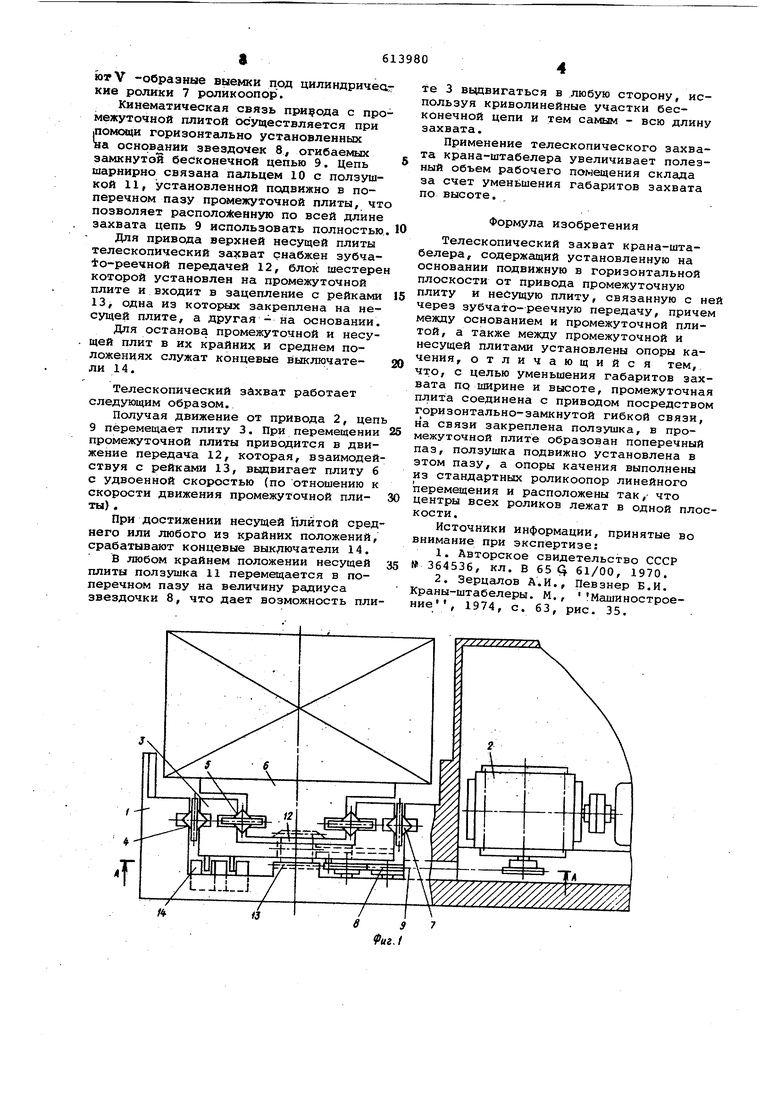
Изобретение относится к псдъмнотранспортному машиностроению, а именно к телескопическому захвату кранаштабелера. Известен кран-штабелер, содержащий основание с установленной на нем подвижной в горизонтальной плоскости кареткой l3 . Однако телескопический выдвижной захват такого крана невозможно использовать из-за ограниченного хода каретки. Известен также телескопический захват крана-штабелера, содержащий установленную на основании подвижную в горизонтальной плоскости от привода промежуточную плиту и несущую плиту, связанную с ней через зубчато-реечную передачу, причем между основанием и пррмежуточной плитой, а также между промежуточной и несущей плитами установлены опоры качения 2}. Недостаток такого захвата - малая грузонесущая способность опор, что приводит к необходимости увеличивать габ.ёриты опор по высоте, а следовател но, - и зазоры между ярусами стеллажа с грузами, что снижает полезную емкость склада. Цель изобретения - уменьшение габа ритов захвата по ширине и высоте. Для этого промежуточная плита свя-. зана с приводом посредством горизонтально-замкнутой гибкой связи, на которой закреплена ползушка, а в промежуточной плите выполнен поперечный паз, в котором эта ползушка подвижно установлена, при этом опоры качения выполнены из стандартных роликоопор линейного перемещения и расположены так, что центры всех роликов лежат в одной плоскости. На фиг. 1 показан телескопический захват крана-штабелера, общий вид; на фиг. 2 - разрез А-А фиг. 1; на фиг. 3 - сечение Б-Б фиг. 2. На основании 1 телескопического захвата крана-штабелера установлена подвижная в горизонтальной плоскости от привода 2 и кинематически связанная с ним промежуточная плита 3. смонтированная на опорах качения 4. На промежуточной плите на опорах качения 5 установлена верхняя несущая плита 6. Опоры качения, выполненные из стандартных роликоопор линейного перемещения, расположены так, что центры всех роликов лежат в одной горизонтальной плоскости. Боковые поверхности основания, промежуточной и верхней плит имеiorV -образные выемки под цилиндричеаг кие ролики 7 роликоопор. Кинематическая связь привода с промежуточной плитой осуществляется при ломощи горизонтально установленных на основании звездочек 8, огибаемых замкнутой бесконечной цепью 9. Цепь шарнирно связана пальцем 10 с пoлэSIIIкой 11, установленной подвижно в поперечном пазу промежуточной плиты, что позволяет расположенную по всей длине захвата цепь 9 использовать полностью Для привода верхней несущей плиты телескопический захват снабжен зубчато-реечной передачей 12, блок шестерен которой установлен на промежуточной плите и входит в зацепление с рейками 13, одна из которых закреплена на несущей плите, а другая - на основании. Для останова промежуточной и несущей плит в их крайних и среднем положениях служат концевые выключатели 14. Телескопический зйхват работает следующим образом. Получая движение от привода 2, цеп 9 перемещает плиту 3. При перемещении промежуточной плиты приводится в движение передача 12, которая, взаимодей ствуя с рейками 13, вьдвигает плиту 6 с удвоенной скоростью (по отношению к скорости движения промежуточной плиты) . При достижении несущей плитой сред него или любого из крайних положений, срабатывают концевые выключатели 14. В любом крайнем положении несущей плиты ползушка 11 перемещается в поперечном пазу на величину радиуса звездочки 8, что дает возможность пли те 3 выдвигаться в .любую сторону, используя криволинейные участки бесконечной цепи и тем самым - всю длину захвата. Применение телескопического захвата крана-штабелера увеличивает полезный объем рабочего помещения склада за счет уменьшения габаритов захвата по высоте. Формула изобретения Телескопический захват крана-штабелера, содержащий установленную на основании подвижную в горизонтальной плоскости от привода промежуточную плиту и несущую плиту, связанную с ней через зубчато-реечную передачу, причем между основанием и промежуточной плитой, а также между промежуточной и несущей плитами установлены опоры качения, отличающийся тем, что, с целью уменьшения габаритов захвата по ширине и высоте, промежуточная плита соединена с приводом посредством горизонтально-замкнутой гибкой связи, на связи закреплена ползушка, в промежуточной плите образован поперечный паз, ползушка подвижно установлена в зтом пазу, а опоры качения выполнены из стандартных роликоопор линейного перемещения и расположены так,- что центры всех роликов лежат в одной плоскости. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР 364536, кл. в 65 С 61/00, 1970. 2.Зерцалов А.И., Певзнер Б.И. Краны-штабелеры. М., Машиностроение, 1974, с. 63, рис. 35. S 12 t1 в У////////////7777Х W//I///////////////.
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический захват крана-штабелера | 1985 |
|
SU1331748A1 |
| Грузозахват телескопический | 1980 |
|
SU895914A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| Кран-штабелер | 1988 |
|
SU1648851A1 |
| Телескопический захват крана-штабелера | 1985 |
|
SU1289756A1 |
| Кран-штабелер | 1987 |
|
SU1504177A1 |
| Кран-штабелер транспортно-накопительной системы | 1987 |
|
SU1615077A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1306852A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| СКЛАД ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU371151A1 |