Изобретение относится к подъемно-транспортному машиностроению, а именно к захватам.
Цель изобретения - расширение эксплуатационных возможностей путем o6ecj печения ориентации груза в вертикальной плоскости.
На фиг. 1 изображен, захват; на фиг. 2- разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на
фиг. 1..,
Захват состоит из неподвижной лапы 1, подвижной лапы 2 и насадки 3 (фиг. 1). Последней захват крепится к головке манипулятора с помощью штыря 4 (фиг. 3).
В лапы 1 и 2 установлены вкладыши 5 и 6. В нижний вкладыш 5 запрессован штифт 7, который проходит через паз 8 в неподвижной лапе . Штифт 7 осью 9 (фиг. 2) соединен с вилкой 10, в которой закреплен винт 11 Второй конеп, винта И ввинчивается в ось 12 (фиг. 1). На свободный конец винта 11 крепится рукоятка 13.
Подвижная лапа 2 втулкой 14 устанавли вается на регулирующий винт 15, который приварен к неподвижной лапе 1. От поворота подвижная лапа удерживается штифтом 16, запрессованным в регулирующий винт 15.
На регулирующий винт 15 надета пружина 17, которая удерживается в сжатом положении гайкой 18. К вкладышам 5 и 6 прикреплены резиновые прокладки 19.
10
15
20
25
2 устанавливается в рабочее положение и гайкой 18 по винту 15 подводится к грузу. Вращая рукоятку 13 винта И, производится перемещение вкладыша 5 с уложенным на .него грузом относительно неподвжной лапы 1. Перемещение вкладыша 5 осуществляется за счет того, что винт 11, вращаясь в резьбовом отверстии оси 12, передвигает наконечник 10 со штифтом 7 вкладыша 5 в пазу 8 неподвижной лапы 1.
Вкладыш 5 с грузом перемещается по окружности, чем достигается ориентирование груза относительно его посадочного
места.
Предлагаемое изобретение обеспечивает не только захват и перенос, но и стыковку груза с его посадочным местом за счет его ориентации по окружности и совмещения шпоночного паза груза со щпон- кой посадочного места.
Формула изобретения
Захват, содержащий захватные лапы, одна из которых выполнена с элементом для соединения с грузоподъемным механизмом, а другая установлена подвижно относительно первой, и винт для регулирования положения второй лапы, отличающийся тем, что, с расширения эксплуатационных возможностей путем обеспечения ориентации груза в вертикальной плоскости, первая
1 Ii/lCrlDl .iJri.liV uui x-iii. - ixvii-tpt. -- . --- -ii
Работа захватом производится в еле- ,,, лапа выполнена с продольным сквозным ..„„„„.„. „.г„ пазом, а захват снабжен установленным в
дующей последовательности.
Захват насадкой 3 вставляется в голов ку манипулятора и закрепляется в ней фтырем 4. Вращая барашек 18, выводят втулку 14 верхней лапы 2 из соединения со штифтом 16; верхняя лапа 2 поворачивается в горизонтальной плоскости на угол не менее 90°. Груз укладывается на вкладыш 5 неподвижной лапы 1, подвижная лапа
35
пазом, а захват снабжен установленным в пазу лапы с возможностью перемещения вдоль чего штифтом, размещенным на внутреннем его конце вкладышем для взаимодействия с грузом i закрепленной на второй лапе горизонтальной втулкой, в которой расположен винт для регулирования положения лапы, один конец которого жестко закреплен на первой лапе.
/ R .// (
0
5
0
5
2 устанавливается в рабочее положение и гайкой 18 по винту 15 подводится к грузу. Вращая рукоятку 13 винта И, производится перемещение вкладыша 5 с уложенным на .него грузом относительно неподвжной лапы 1. Перемещение вкладыша 5 осуществляется за счет того, что винт 11, вращаясь в резьбовом отверстии оси 12, передвигает наконечник 10 со штифтом 7 вкладыша 5 в пазу 8 неподвижной лапы 1.
Вкладыш 5 с грузом перемещается по окружности, чем достигается ориентирование груза относительно его посадочного
места.
Предлагаемое изобретение обеспечивает не только захват и перенос, но и стыковку груза с его посадочным местом за счет его ориентации по окружности и совмещения шпоночного паза груза со щпон- кой посадочного места.
Формула изобретения
Захват, содержащий захватные лапы, одна из которых выполнена с элементом для соединения с грузоподъемным механизмом, а другая установлена подвижно относительно первой, и винт для регулирования положения второй лапы, отличающийся тем, что, с расширения эксплуатационных возможностей путем обеспечения ориентации груза в вертикальной плоскости, первая
ii
,,, лапа выполнена с продольным сквозным пазом, а захват снабжен установленным в
лапа выполнена с продольным сквозным пазом, а захват снабжен установленным в
пазом, а захват снабжен установленным в пазу лапы с возможностью перемещения вдоль чего штифтом, размещенным на внутреннем его конце вкладышем для взаимодействия с грузом i закрепленной на второй лапе горизонтальной втулкой, в которой расположен винт для регулирования положения лапы, один конец которого жестко закреплен на первой лапе.
6-5
9-В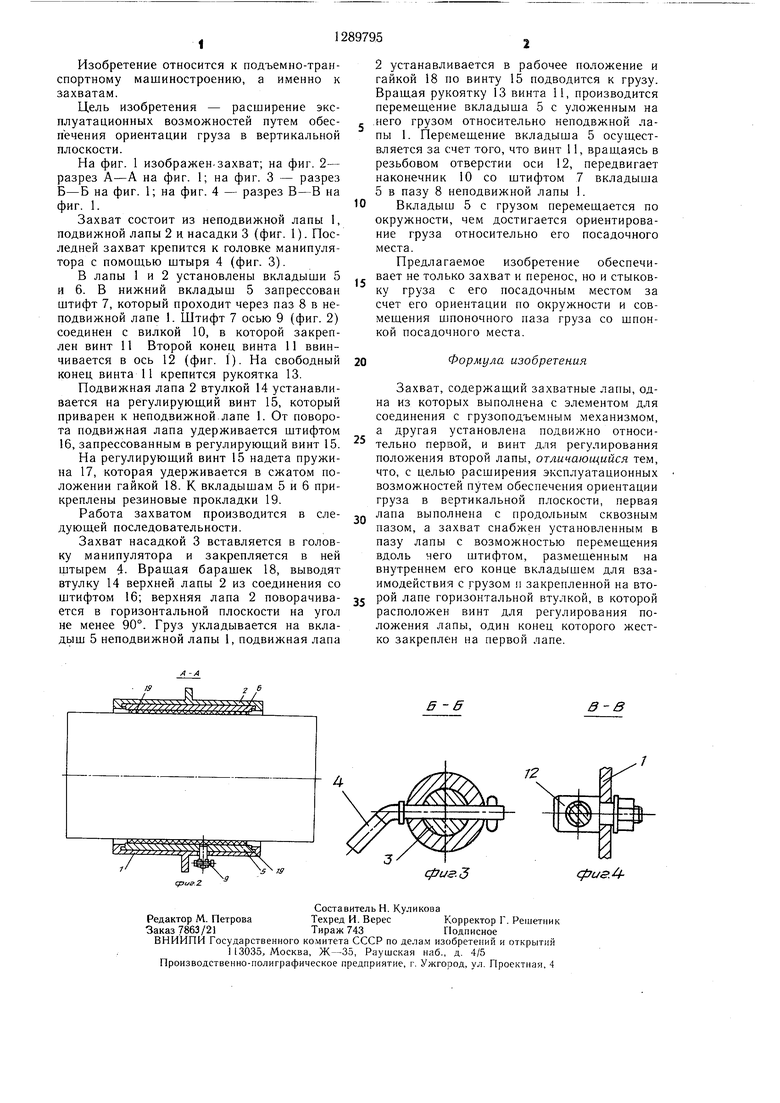
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь | 1985 |
|
SU1339081A1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| Подъемник для проведения монтажных работ | 1987 |
|
SU1534000A1 |
| ТАКЕЛАЖНЫЙ УЗЕЛ | 2003 |
|
RU2245835C1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2381170C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| УСТРОЙСТВО ПОГРУЗКИ-ВЫГРУЗКИ ГРУЗА НА ПОДВОДНОМ ТЕХНИЧЕСКОМ СРЕДСТВЕ | 2010 |
|
RU2422319C1 |
| НАСОСНЫЙ АГРЕГАТ | 2000 |
|
RU2191928C2 |
Изобретение относится к области подъемно-транспортного машиностроения, в частности к захватам. Цель изобретения - расширение эксплуатационных возможностей путем обеспечения ориентации груза в вертикальной плоскости. Захват содержит лапы 1 и 2 с вкладышами 5 и 6. Вкладыш 5 закреплен на приводном штифте 7, который расположен в пазу 8 лапы 1. Лапа 2 выполнена с втулкой 14, охватывающей регулирующий винт 15. Захват соединяется с грузоподъемным механизмом. Лапа 2 поворачивается во втулке 14 на 90°. Груз укладывается на вкладыш 5 лапы 1. Лапа 2 поворачивается в рабочее положение и винтом 15 подводится к грузу. Перемещением штифта 7 ориентируют груз в вертикальной плоскости. 4 ил. 5 . Головка MOHuntjAp- тора i (/) N3 00 со со ел 8 1112 1 0иг,7/ 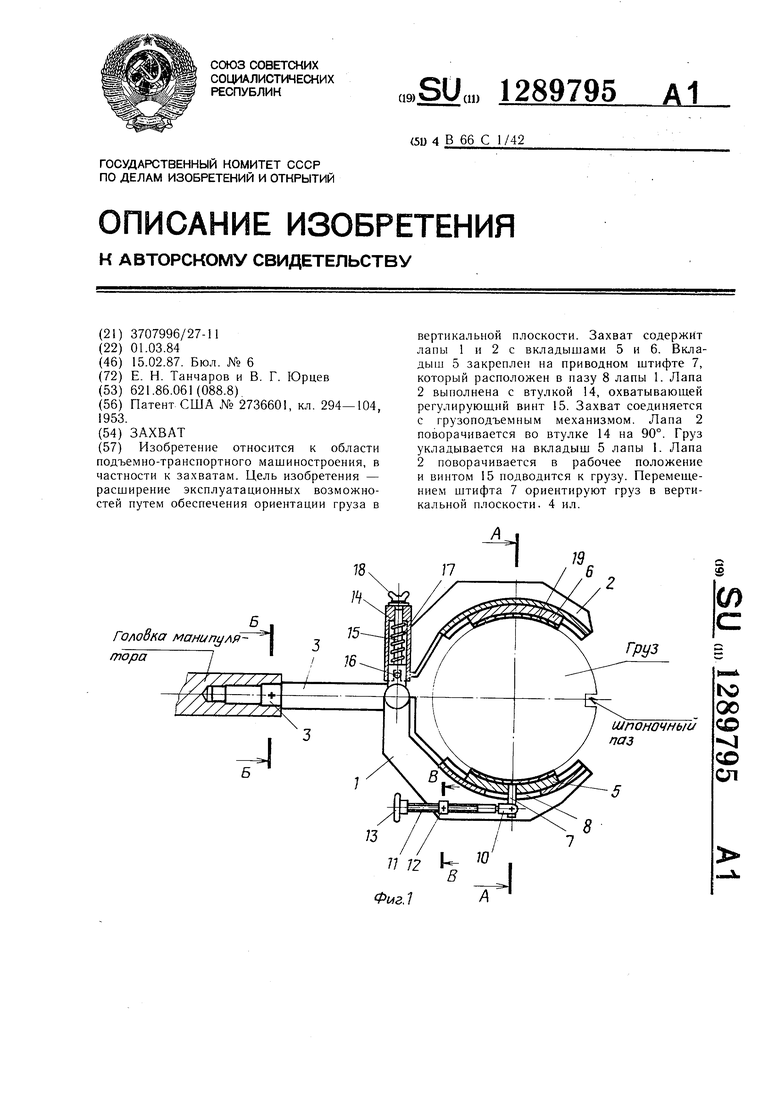
г7ДХ ЧХ У 5о1тКх
Y л;-/ ху
/
73
фиг- 3
фиг.
Составитель Н. Куликова
Редактор М. ПетроваТехред И. ВересКорректор Г. Решетник
Заказ 7863/2)Тираж 743Подписное
ВНИ ИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ВЫБОРА ЛУЧА | 2017 |
|
RU2736601C1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ТЕРМИОННАЯ ЛАМПА | 1920 |
|
SU294A1 |
