(М) 10- Для автоматической смены П 9 без смены инструментальных блоков ротор содержит механизмы циклического поворота П 9 и средство автоматического управления этими механизмами. Механизмы поворота выполнены в виде валика (В) 17 с канавками и фиксатора рычага. В 17 соединен с инструментальным блоком. Средство автоматического управления выполнено в виде фотодатчика, взаимодействующего через электромагнит с рычагом-фиксатором. При нормальной работе устройства по- . еле подачи изделия 26 в М 10 последняя, поджимаясь, подводит его к П 9.
1
Изобретение относится к машиностроению, в частности к технологическим роторам с автоматической сменой инструмента без смены инструментальных блоков в роторных машинах и ли- ниях.
Целью изобретения является повышение производительности путем обеспечения автоматической смены инструмента в технологическом роторе без сме- ны инструментальных блоков и останов машины.
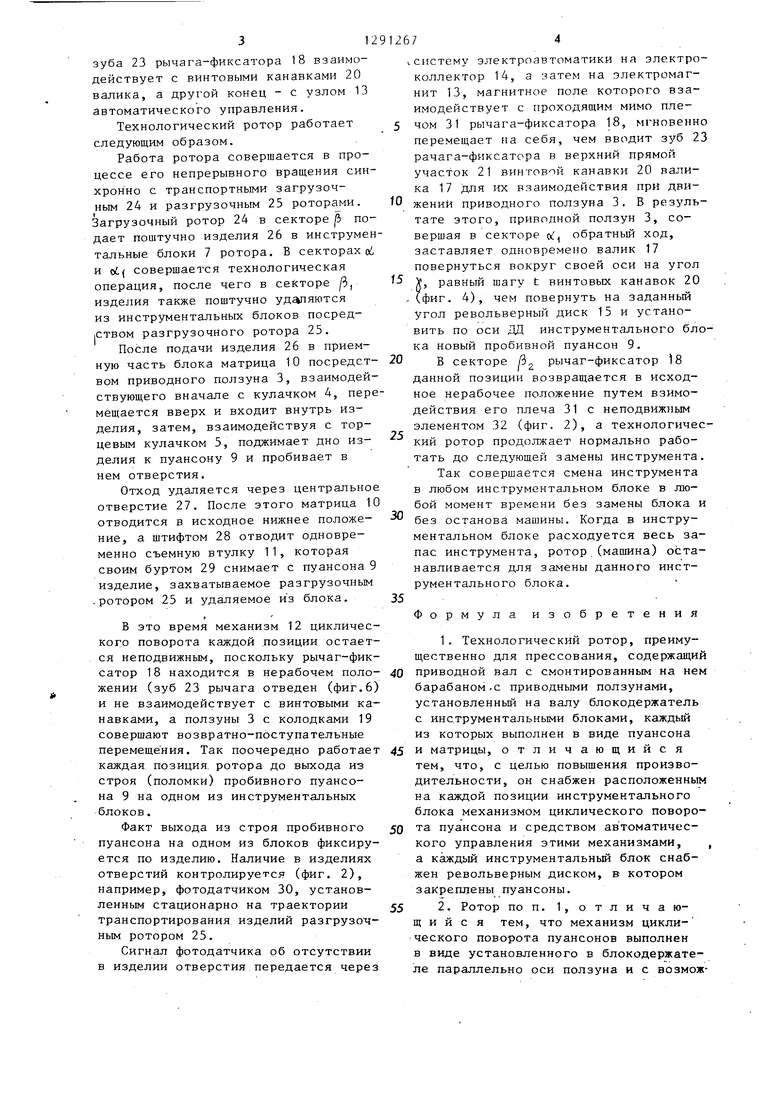
На фиг. 1 изображен технологический ротор, общий вид; на фиг. 2 - то
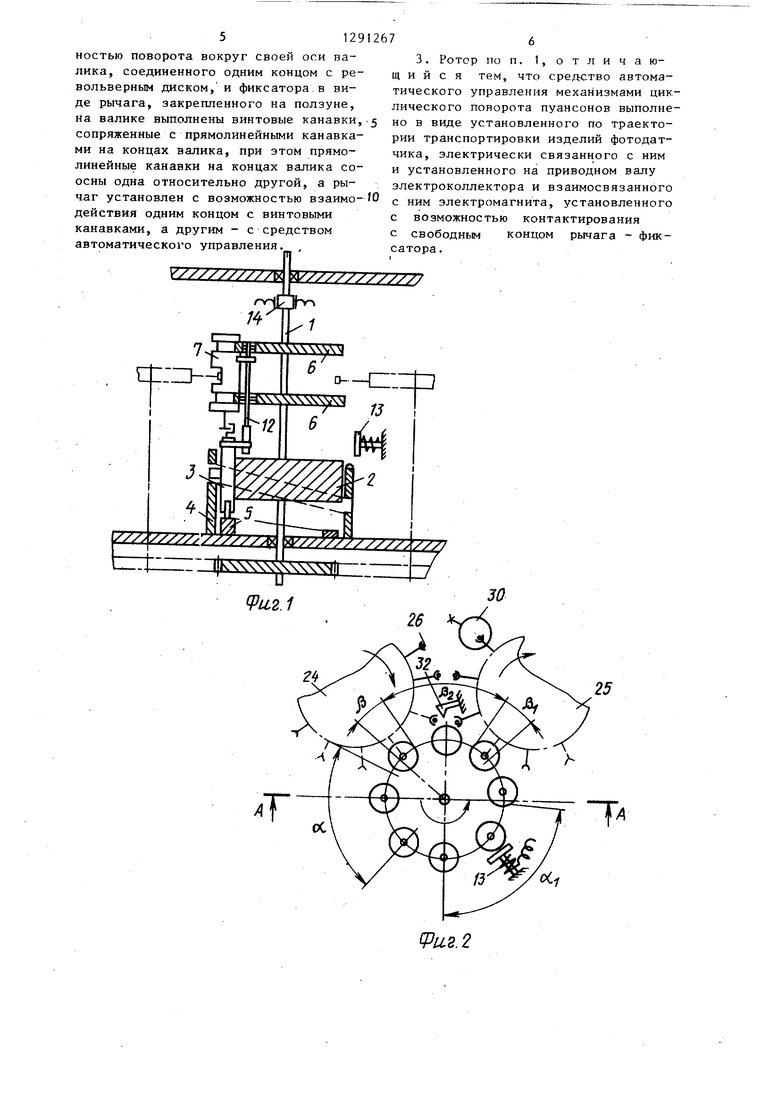
же, вид сверху; на фиг. 3 - разрез А-А на- фиг. 2; на фиг. 4 - развертка валика с винтовыми канавками; на фиг. 5 - разрез Б-Б на фиг. 3| на фиг.6 .- разрез В-В на фиг. 3.
Ротор содержит (фиг. 1, 2) при- водной вал 1, на котором смонтирова- ны барабан 2 с приводными ползунами взаимодействующими с кольцевым 4 и (для восприятия технологических уси- лий) торцевым 5 кулачками, блокодер- жатель 6 с инструментальными блоками 7, состоящими (фиг. 3) из корпуса 8, в котором смонтирован комплект инструмента в виде пробивного пуансона 9 и матрицы 10, съемной втулки 11 , Вся рабочая зона разбита на рабочий и холостой секторы с углами «t чЫ , .
Для автоматической смены инстру- мента без смены инструментальных
Происходит пробивка отверстия. Затем М 10 отводится, и изделие снимается. Выход П 9 из строя контролируется по изделию. Наличие в изделии отверстия контролируется фотодатчиком. Сигнал об отсутствии в изделии 26 отверстия передается через систему электроавтоматики на В 17. В результате этого приводной ползун 3 заставляет В 17 провернуться вокруг своей оси на угол, равный шагу винтовых канавок на В 17, и тем самым повернуть револьверный диск 15 и установить в рабочее положение новый П 9. 2 з.п. ф-лы, 6 ил.
r
0
блоков ротор дополнительно снабжен на каждой позиции механизмами 12 циклического поворота, узлом в виде электромагнита 13 автоматического управления этими механизмами, жестко установленным в секторе обратного Кода с углом cL и электрически связанным с электроколлектором 14, смонтированным на валу 1, а каждьй инструментальный блок 7 снабжен дополнительным элементом в виде револьверного диска 15 с закрепленными в его гнездах пробивными пуансонами 9 и кинематически связанного с соответствующим механизмом 12 цилиндрического поворота через зубчатое зацепление с шестерней 16.
Механизм 12 циклического поворота выполнен (фиг. 3, 6) в виде смонтированного в блокодержателе 6 с возможностью поворота вокруг своей оси валика 17 и рычага-фиксатора 18, жестко закрепленного на колодке 1-9 приводного ползуна 3, при этом один конец валика выполнен с винтовыми канавками 20, расположенными так, что прямолинейный конец 21 одной канавки соосен по прямолинейному началу 22 последующей канавки (количество канавок 20 зависит от передаточного отношения зубчатого колеса 16 и количества пробивных пуансонов 9), а другой конец валика кинематически связан (через шестерню 16) с револьверным диском 15. Одинконец в виде
312
зуба 23 рычага-фиксатора 18 взаимодействует с винтовыми канавками 20 валика, а другой конец - с узлом 13 автоматического управления.
Технологический ротор работает следующим образом.
Работа ротора совершается в процессе его непрерывного вращения синхронно с транспортными загрузочным 24 и разгрузочным 25 ротора ми. Загрузочный ротор 24 в секторе jb подает поштучно изделия 26 в инструментальные блоки 7 ротора. В секторах oi и о6 совершается технологическая операция, после чего в сеКторе , изделия также поштучно удг пяются из инструментальных блоков посред- iCTBOM разгрузочного ротора 25.
После подачи изделия 26 в приемную часть блока матрица 10 посредст- вом приводного ползуна 3, взаимодействующего вначале с кулачком 4, перемещается вверх и входит внутрь изделия, затем, взаимодействуя с торцевым кулачком 5, поджимает дно изделия к пуансону 9 и пробивает в нем отверстия.
Отход удаляется через центральное отверстие 27. После этого матрица 10 отводится в исходное нижнее положе- ние, а штифтом 28 отводит одновременно съемную втулку 11, которая своим буртом 29 снимает с пуансона 9 изделие, захватываемое разгрузочным .ротором 25 и удаляемое из блока.
В это время механизм 12 циклического поворота каждой .позиции остается неподвижным, поскольку рычаг-фиксатор 18 находится в нерабочем поло- жении (зуб 23 рычага отведен (фиг.6) и не взаимодействует с винтовыми канавками, а ползуны 3 с колодками 19 совершают возвратно-поступательные перемещения. Так поочередно работает каждая позиция, ротора до выхода из строя (поломки) пробивного пуансона 9 на одном из инструментальных блоков.
Факт выхода из строя пробивного пуансона на одном из блоков фиксируется по изделию. Наличие в изделиях отверстий контролируется (фиг. 2), например, фотодатчиком 30, установленным стационарно на траектории транспортирования изделий разгрузочным ротором 25.
Сигнал фотодатчика об отсутствии в изделии отверстия передается через
74
систему электроавтоматики на электроколлектор 14, а затем на электромагнит 13, магнитное поле которого взаимодействует с проходящим мимо плечом 31 рычага-фиксатора 18, мгновенно перемещает на себя, чем вводит зуб 23 рачага-фиксатора в верхний прямой участок 21 винтовой канавки 20 валика 17 для их взаимодействия при движений приводного ползуна 3. В результате этого, приводной ползун 3, совершая в секторе к обратный ход, заставляет одновремено валик 17 повернуться вокруг своей оси на угол J, равный шагу t винтовых канавок 20 (фиг. 4), чем повернуть на заданный угол револьверный диск 15 и установить по оси ДЦ инструментального блока новый пробивной пуансон 9.
В секторе в рычаг-фиксатор 18 данной позиции возвращается в исходное нерабочее положение путем взимо- дейстБия его плеча 31 с неподвижным элементом 32 (фиг. 2), а технологический ротор продолжает нормально работать до следующей замены инструмента.
Так совершается смена инструмента в любом инструментальном блоке в любой момент времени без замены блока и без останова машины. Когда в инструментальном блоке расходуется весь запас инструмента, ротор.(машина) останавливается для замены данного инструментального блока.
Формула изобретения
1. Технологический ротор, преимущественно для прессования, содержащий приводной вал с смонтированным на нем барабаном -с приводными ползунами, установленный на валу блокодержатель с инструментальными блоками, каждый из которых выполнен в виде пуансона и матрицы, отличающийся тем, что, с целью повышения производительности, он снабжен расположенным на каждой позиции инструментального блока механизмом циклического поворота пуансона и средством автоматического управления этими механизмами, , а каждый инструментальный блок снабен револьверным диском, в котором закреплены пуансоны.
2. Ротор по п. 1, отличаюийся тем, что механизм циклиеского поворота пуансонов выполнен виде установленного в блокодержате- е параллельно оси ползуна и с возмож51291267
ностью поворота вокруг своей оси валика, соединенного одним концом с револьверным диском, и фиксатора в виде рычага, закрепленного на ползуне, на валике выполнены винтовые канавки,-5 сопряженные с прямолинейными канавками на концах валика, при этом прямолинейные канавки на концах валика со- осны одна относительно другой, а ры3. Ротор по п. 1, отличающийся тем, что средство автоматического управления механизмами циклического поворота пуансонов выполнено в виде установленного по траектории транспортировки изделий фотодатчика, электрически связанного с ним и установленного на приводном валу злектроколлектора и взаимосвязанного
ОСПЫ иди л и i-JiJJiiw
чаг установлен с возможностью взаимо-/О с ним электромагнита, установленного
действия одним концом с винтовыми канавками, а другим - с средством автоматического управления.
с возможностью контактирования с свободным концом рычага - фиксатора.
Xjf
3. Ротор по п. 1, отличающийся тем, что средство автоматического управления механизмами циклического поворота пуансонов выполнено в виде установленного по траектории транспортировки изделий фотодатчика, электрически связанного с ним и установленного на приводном валу злектроколлектора и взаимосвязанного
с ним электромагнита, установленного
с ним электромагнита, установленного
с возможностью контактирования с свободным концом рычага - фиксатора.
1
fpu2.2
Б-Б
Фиг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНАЯ МАШИНА | 1969 |
|
SU247217A1 |
| Роторно-конвейерная машина | 1983 |
|
SU1217741A1 |
| Роторно-конвейерная машина | 1977 |
|
SU686808A1 |
| Пробивной револьверный пресс | 1990 |
|
SU1810189A1 |
| Роторная машина | 1981 |
|
SU1038040A1 |
| Роторный автомат для сборки деталей запрессовкой | 1978 |
|
SU872171A1 |
| Роторно-конвейерная машина | 1980 |
|
SU948618A1 |
| Роторная машина | 1988 |
|
SU1537474A1 |
| Отрезной автомат роторного типа | 1989 |
|
SU1678487A2 |
| ПРЕСС С РЕВОЛЬВЕРНОЙ ГОЛОВКОЙ | 1970 |
|
SU273628A1 |
Изобретение относится к области машиностроения, в частности к технологическим роторам с сменой инструмента без смены инструментальных блоков. Целью изобретения является повышение производительности. Ротор содержит пуансон (П) 9, закреплеиньй в револьверном диске 15, и матрицу f((Л ФигЗ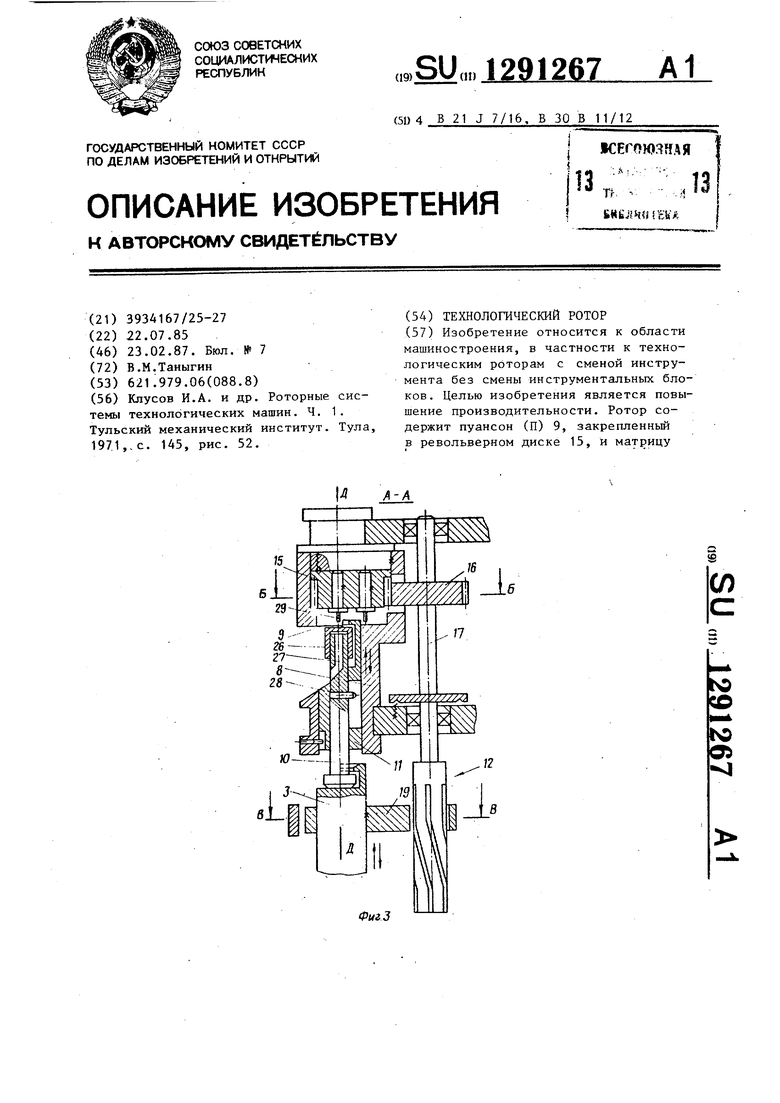
В В
13
Редактор А.Петров
Составитель Н.Чернилевская
Техред И.ПоповичКорректор Л.Пилипенко
Заказ 77/12Тираж 583 .Подписное
ВНИИПИ Государственного комитета СССРпо делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Клусов И.А | |||
| и др | |||
| Роторные системы технологических машин | |||
| Ч | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Тульский механический институт | |||
| Тула, 1971,,с | |||
| Заслонка для русской печи | 1919 |
|
SU145A1 |
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
