,1
Ч 5
J
Sfflf
оэ to ю
Изобретение относится к машиностроению и может быть использовано в следящих системах линейного перемещения, например в становых приводах, обеспечивающих позиционирование объектов.
Целью изобретения является повыг шение надежности за счет снижения тре137
ния между винтом и гайкой.
На чертеже приведено устройство для осуществления предлагаемого способа;
Устройство содержит ходовой винт 1, на котором установлена гайка 2. С ходовым винтом соединен вибратор 3 механических колебаний. Гайка 2 жестко соединена с полумуфтой 4 электро- (магнитной муфты. Вторая полумуфта 5 злектромагнитной муфты связана с направляющей 6 линейного перемещения поводком 7. Полумуфта 5 конструктивно соединена с полумуфтой А и при этом не взаимодействует с ходовым винтом 1.
В качестве вибратора 3 механических колебаний может быть использован электромагнитный вибратор крутильных колебаний, а в качестве электромагнитной муфты можно применять фрикционную электромагнитную муфту, обмотка -которой размещена в полумуфте 5
Способ осуществляют следующим образом.
Возбуждают круговые колебания винта 1 с помощью, вибратора 3. При повороте винта 1 в одном направлении включают муфту, при этом ее полумуфты 4 и 5 сцепляются между собой, исключая поворот гайки 2 и допуская ее
772272
линейные перемещения посредством поводка 7 по направляющей 6. При этом между поверхностями винта 1 и гайки 2 происходит фрикционное взаимодействие с переменной скоростью. При обратном повороте винта 1 отключают электромагнитную муфту и при этом вместе с винтом поворачивают гайку
10 2. В малонагр женных передачах при обратном повороте винта целесообразно гайку фиксировать на винте, чтобы исключить ее поворот. Далее описанная последовательность повторяет15 ся и гайка 2 совершает шаговые перемещения с частотой, определяемой частотой колебаний вала, и щагом, определяемым углом поворота вала. Осуществление высокочастотных в
20 диапазоне 0-250 Гц колебаний вала с углом поворота, изменяемым в диапазоне О-ЗО, позволяет получить широкий диапазон шаговых перемещений. При этом с тцественно снижается тре25 ние между винтом и гайкой и, следовательно, повьш1ается надежность шагового перемещения.
Формула изобретения
Способ шагового перемещения гайки, включающий вращение винта и перемещение по нему гайки, отличающийся тем, что, с целью повьш1е- иия надежности за счет снижения трения между винтом и гайкой, вращение винта осуществляют посредством крутильных колебаний, при этом при вращении винта в одном из направлений одновременно с ним поворачивают гайку.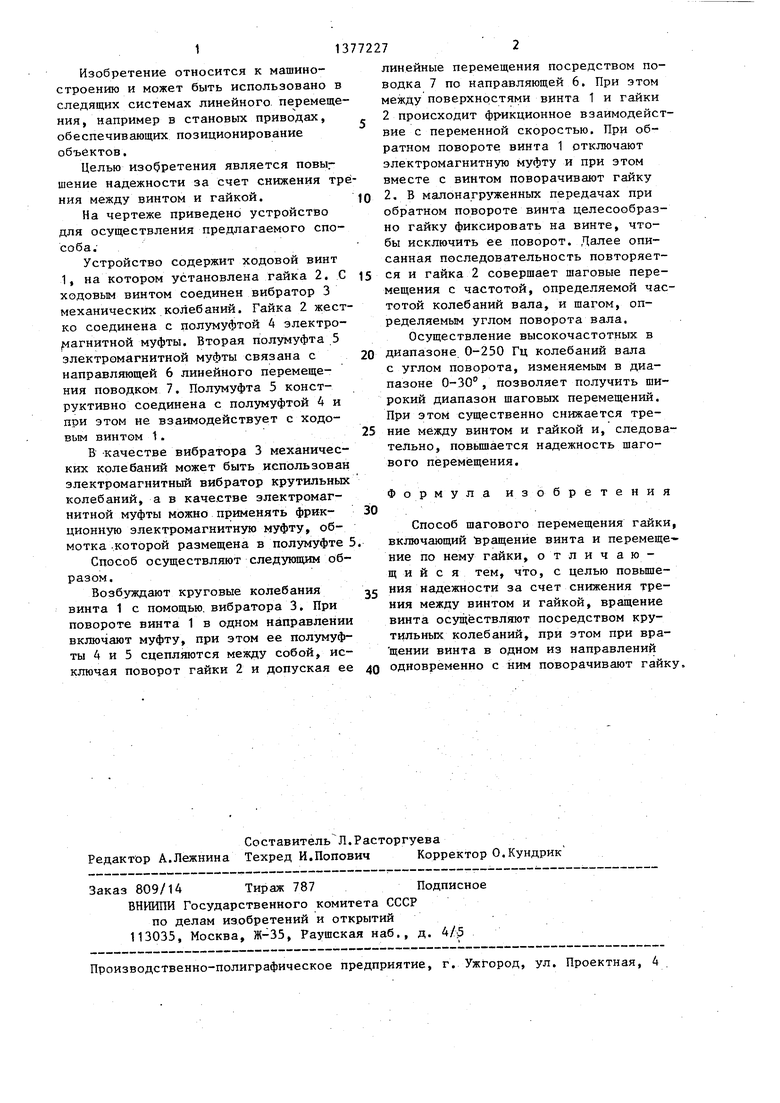
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения,преимущественно,руки манипулятора | 1985 |
|
SU1291384A1 |
| Линейный гидроусилитель | 1991 |
|
SU1778374A1 |
| Устройство для переключения передач | 1982 |
|
SU1073514A1 |
| Станок для индукционной закалки изделий | 1984 |
|
SU1392116A1 |
| Станок для фасонной резки труб | 1979 |
|
SU829363A1 |
| Фрезерный станок | 1981 |
|
SU984714A1 |
| Механизм шагового перемещения | 1988 |
|
SU1606782A1 |
| Поточная линия ультразвукового контроля изделий с цилиндрическими поверхностями и автомат сканирования ультразвуковым преобразователем | 1985 |
|
SU1363056A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ ГАЗО-, НЕФТЕ- И ПРОДУКТОПРОВОДОВ, МЕХАНИЗМ АВТОМАТИЧЕСКОГО ОТКЛЮЧЕНИЯ ШТУРВАЛА РУЧНОГО ДУБЛЕРА | 2007 |
|
RU2334132C1 |
| Устройство для подачи длинномерного материала в зону обработки | 1983 |
|
SU1199376A1 |
Изобретение относится к машино- строению и может быть использовано в следящих системах линейного перемещения, например в становых приводах, обеспечивающих позиционирование объектов. Цель - повьшение надежности за счет снижения трения между винтом (В). 1 и гайкой (Г) 2. На ходовом В 1 установлена Г2. Последняя жестко соединена с полумуфтой 4 электромагнитной муфты. Полумуфта 4 конструктивно соединена с полумуфтой 5. Последняя связана с направляющей 6 линейного перемещения поводком 7. Вращение В 1 осуществляют посредством крутильных колебаний электромагнитного вибратора 3. При повороте В 1 в одном направлении включают муфту. Полумуфты 4 и 5 между собой сцепляются, т.е. исключается поворот Г 2. Она линейно перемещается посредством поводка 7 по направляющей 6. Между поверхностями В 1 и Г 2 происходит фрикционное взаимодействие с переменной скоростью. При обратном повороте В 1 отключают муфту и вместе с В 1 поворачивают Г 2. Далее описанная последовательность повторяется и Г 2 совершает шаговые перемещения. 1 ил. (б
| Устройство для перегрузки в горизонтальной плоскости грузов,преимущественно контейнеров | 1977 |
|
SU735532A1 |
| Механизм шагового перемещения | 1982 |
|
SU1077836A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
