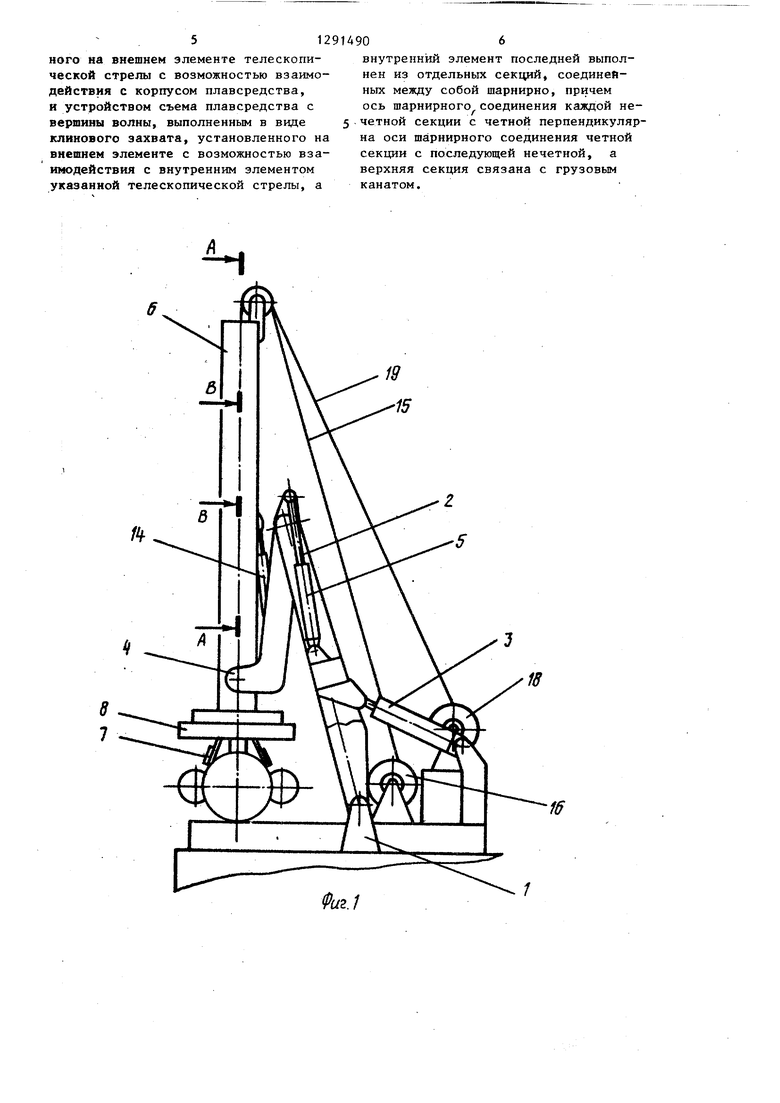
условий осуществления процесса сты- . ковки, а также исключения рывков в грузовых канатах в условиях волнения моря. Устройство состоит из шарнирно соединенных между собой грузовой стрелы 2, установленной на палубе судна, рычага 4 и телескопической стрелы, в состав которой входят внешний элемент 6 с ложементом 7 и автоматическим захватом 8 и внутренний элемент. Внутренний элемент состоит из отдельных секций 10, образующих между собой вращательные пары. На внутреннем элементе закреплен грузовой автоматический захват 13. Приводом внутреннего элемента является канат 19 грузовой лебедки 18. Сквозь внутренний элемент и .захват 13 проходит канат-проводник 15 следящей лебедки 16, свободным концом крепя1
Изобретение относится к судостроению, в частности к судовым спуско- подъемным устройствам (СИУ) для спука на воду и подъема с воды катеров и других плавсредств.
Цель изобретения - повышение надежности устройства в работе путем улучшения условий осуществления процесса стыковки, а также исключения рывков в грузовом канате в условиях волнения моря.
На фиг. 1 показано СПУ, вид сбоку; на фиг. 2 - то же, в момент захватывания плавсредства; на фиг.З - сечение А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 3;. на фиг.5 - .сечение В-В на фиг. 1; на фиг. 6 - вид Г на фиг. 5.
Устройство содержит шарнирно закрепленную на обухах 1, установленных на палубе судна, грузовую стрелу 2. Приводом стрелы является гидроцилиндр 3. Со стрелой 2 шарнирно с возможностью поворота в плоскости стрелы связан рычаг 4, приводом котрого является гидроцилиндр 5. С рычагом 4 шарнирно, также с возмож- ностью поворота в плоскости стрелы, соединена телескопическая стрела, сдержащая внешний элемент 6 с ложещийся за подъемный шток плавсредства. Устройство снабжено приводным клиновым захватом, установленным во внешнем элементе 6. Рабочие поверхности клиньев захвата при подъеме плавсредства на палубу сопрягаются с поверхностью внутреннего элемента. При подъеме плавсредства на палубу телескопическая стрела выносится . грузовой стрелой 2 и рычагом 4 за борт. На подъемный шток плавсредства заводится свободный конец каната- проводника 15 и после включения в слежение лебедки 16 по канату 15 лебедкой 18 опускается внутренний элемент с захватом 13. Клиновой захват предотвращает падение плавсредства при возникновении слабины в канате 19 в результате воздействия волны на поднимающееся плавсредство. 6 ил.
ментом 7 и автоматическим захватом 8. Внутри внешнего элемента 6, сопрягаясь с направляющими катками 9, перемещается внутренний элемент, состоящий из отдельных секций 10 шарнирно посредством осей 11 соединенных между собой таким образом, что каждая секция образует вращательные пары с двумя соседними секциями, причем
оси 11 этих пар перпендикулярны одна к другой. Внутри секций 10 установлены клюзы 12. В нижней части внутреннего элемента установлен грузовой автоматический захват 13. Возможный угол поворота отдельных секций 10 одна относительно другой такой, что максимальный УголЫ поворота внутреннего элемента относительно вертикали не превышает 15. Приво1ДОМ телескопической стрелы является гидроцилиндр 14. Сквозь внутренний элемент с захватом 13 проходит канат- проводник 15 следящей лебедки 16, установленной на палубе судна. Канат- проводник 15 огибает шкив l) на внешнем элементе 6, проходит внутри внутреннего элемента с захватом 13 и при подъеме объекта с поверхности воды крепится на подъемном штоке
объекта.
Приводом внутреннего элемента телескопической стрелы является грузовая лебедка 18 с грузовым ка- н атом 19, огибающим шкив 20 на внешнем элементе и закрепленным на верх- ней секции внутреннего элемента.
Во внешнем элементе 6 установлен клиновый захват, состоящий из сопря- гающихся с внутренней трубой клиньев 21, перемещающихся в направляю- щих 22 и связанных с приводом. Привод клиньев содержит гидроцилиндр 23 и связанные с пружиной 24 рычаги 25 и 26.
При подъеме объекта на борт судна устройство работает следующим образо (фиг. 2).
Стрела 2 гидроцилиндром 3 вываливается за борт. Гидроцилиндром 5 рычга 4 и гидроцилиндром 14 телескопи- ческая стрела устанавливается вертикально в требуемое для подъема объекта положение. При этом гидроцилиндр
14 не позволяет стреле раскачивать
ся в плоскости, перпендикулярной оси шарниров крепления этой стрелы. Следящая лебедка 16 стравливает канат- проводник 15 и последний соединяется, например, аквалангистом с подъемным штоком объекта. После этого ле- бедка 16 обтягивает канат-проводник и автоматически включается в слежение. Гидроцилиндр 23 отводит клинья 21 от соприкосновения с поверхностью внутреннего элемента. Отдается также автоматический захват 8. Лебедка 18 стравливает канат 19 и внутренний Элемент опускается по натянутому канату на объект. Так как внутренний элемент, выходя из внешнего элемен- та 6, приобретает достаточную гиб- и вес отдельных секций 10 относительно небольшой, захват 13 во все время опускания внутреннего эле- мента имеет направление, соответству ющее направлению подъемного штока на объекте. Следовательно, захват 13 должен безотказно стыковаться с подъемным штоком объекта.
После автоматического захватывани объекта лебедка 16 выключается, из слежения, а грузовая лебедка 18 начинает поднимать внутренний элемент телескопической стрелы вместе с объектом с поверхности воды. Одновременно гидроцилиндр 23 освобождает клинья 2 и последние под действием собственного веса и пружины 24, перемещаясь в направляющих 22, сопрягаются с поверхностью -внутренн его элемента. Ес внутренний элемент поднимается недостаточно быстро, то волна может приподнять объект вместе с внутренн элементом, причем а грузовом канате 19 образовывается слабина. После ухода волны внутренний элемент стремится опуститься вниз под действием силы тяжести собственной и объекта. Сила трения между поверхностью внутреннего элемента и клиньями 21 заставляет клинья опуститься в направляющих 22, происходит самозаклинивание внутреннего элемента и его остановка. Рывка в грузовом к,анате 19 не будет. После выборки слабины в канате 19 лебедкой 18 про должается подъем объекта. Клинья 21 в направлении подъема внутреннего элемента не препятствуют его движению. В верхнем положении внутреннего элемента объект сопрягается с ложементом 7 и захватывается автоматическим захватом 8. Гидроцилиндрами 3 и 5, заваливающими грузовую стрелу, и гидроцилиндром 14, удерживающим телескопическую стрелу в вертикальном положении, объект устанавливается в отведенное ему место на палубе судна.
Спуск объекта производится в обратном порядке.
Формула изобретения
Спуско-подъемное устройство для плавсредств, включающее шарнирно установленную на палубе судна-носителя грузовую стрелу, шарнирно закрепленную на ноке грузовой стрелы телескопическую стрелу, на внешнем элементе которой закреплен автоматический захват, а на внутреннем элементе - грузовой автоматический захват и грузовой канат с приводом, а также узел ограничения раскачивания телескопической стрелы в плоскости перпендикулярной оси шарнира соединения обеих стрел, отл и чающее с я тем, что, с целью повышения надежности устройства в работе путем улучшения условий осуществления процесса стыковки, а также исключения рывков в грузовом канате в условиях волнения моря, оно снабжено узлом стабилизации плавсредства в автоматическом захвате, выполненным в виде ложемента, установлен1291490
ного на внешнем элементе телескопической стрелы с возможностью взаимодействия с корпусом плавсредства, и устройством съема плавсредства с вершины волны, выполненным в виде клинового захвата, установленного на внешнем элементе с возможностью взаимодействия с внутренним элементом указанной телескопической стрелы, а
внутренний элемент последней выполнен из отдельных секций, соединей- ных между собой шарнирно, причем ось шарнирного соединения каждой не- 5 четной секции с четной перпендикулярна оси шарнирного соединения четной секции с последующей нечетной, а верхняя секция связана с грузовым канатом.

| название | год | авторы | номер документа |
|---|---|---|---|
| Судовое спуско-подъемное устройство для плавающих объектов | 1988 |
|
SU1569280A1 |
| Спуско-подъемное устройство для плавсредств | 1977 |
|
SU679482A1 |
| Спуско-подъемное устройство для подъема плавсредств на волнении | 1976 |
|
SU652034A1 |
| ТРАВЕРСА СПУСКО-ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2616452C2 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА ПЛАВАЮЩЕГО ОБЪЕКТА | 1991 |
|
RU2013290C1 |
| Судовое устройство для спуска и подъема плавсредств | 1990 |
|
SU1791272A1 |
| Устройство для пересадки людей на судно | 1973 |
|
SU516571A1 |
| Устройство для пересадки людей с судна на судно в условиях качки | 1975 |
|
SU695891A1 |
| Устройство для пересадки людей с судна на судно в условиях качки | 1973 |
|
SU507483A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |


Изобретение относится к судостроению, в частности к судовым устройствам для спуска на воду и подъема с воды плавсредств. Целью изобретения является повышение надежности устройства в работе путем улучшения 13 (Л Is5 QD СО Й/г
Фиг. 1
19
15
fff
.1
/5
fej
Ш
jt
дидг
-
иг.5
| Спуско-подъемное устройство для плавсредств | 1977 |
|
SU679482A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
