() УСТРОЙСТВО ДЛЯ ПОГРУЗКИ СЫПУЧИХ
И КУСКОВЫХ МАТЕРИАЛОВ В ЖЕЛЕЗНОДОРОЖНЫЕ
1
Изобретение относится к загрузке полувагонов сыпучим и кусковым материалом, например песком, углем,рудой и может быть использовано в угольной, горнодобывающей, строительной и,других- областях промышленности.
Известно устройство для погрузки сыпучих и кусковых материалов, содержащее разгрузочную емкость с приводным затвором lj .
Недостаток известного устройства невозможность производить загрузку полувагонов при их движении и его сложность.
Целью изобретения является повыше-)5 ние надежности путем обеспечения равномерности распределения нагрузок на оси полувагонов.
Поставленная цель достигается тем, что устройство снабжено датчиком и 20 задатчиком величину перемещения загружаемого вагона, блоками коррекции и сравнения, причем входы блока коррекции соединены с выходами датчика ПОЛУВАГОНЫ
и задатчика величины перемещения, выход блока коррекции соединен с одним из выходов блока сравнения, второй вход которого соединен с датчиком величины перемещения, а выход блока сравнения соединен с приводом затвора разгружаемой емкости.
Датчик перемещения полувагона может состоять из закрепленного на опоре рычага с роликом, контактирующим с полувагоном, смонтированного с возможностью перемещения в вертикальной плоскости, конечного выключателя,, установленного на опоре рычага, счетчика и преобразователя, выполненного в виде бесконтактного выключателя, установленного на оси вращения ролика, на внутренней поверхности которого равномерно по длине окружности закреплены металлические зубцы, проходящие через щель бесконтактного выключателя, который соединен со счетчиком.
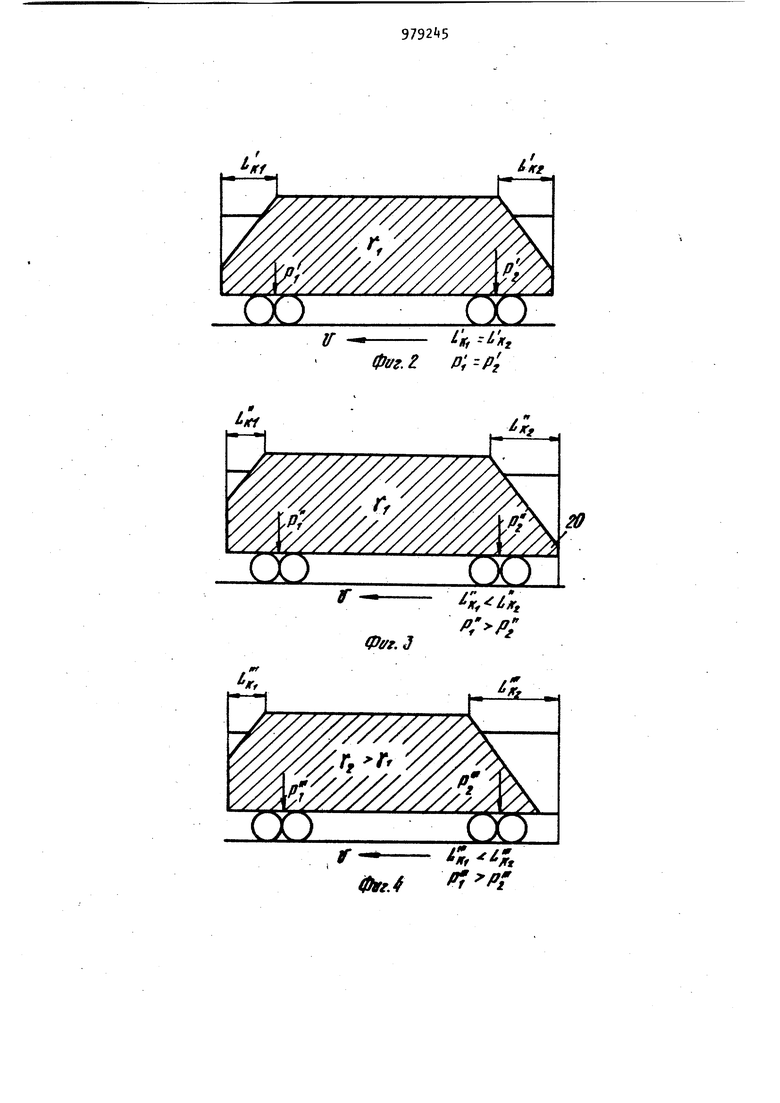
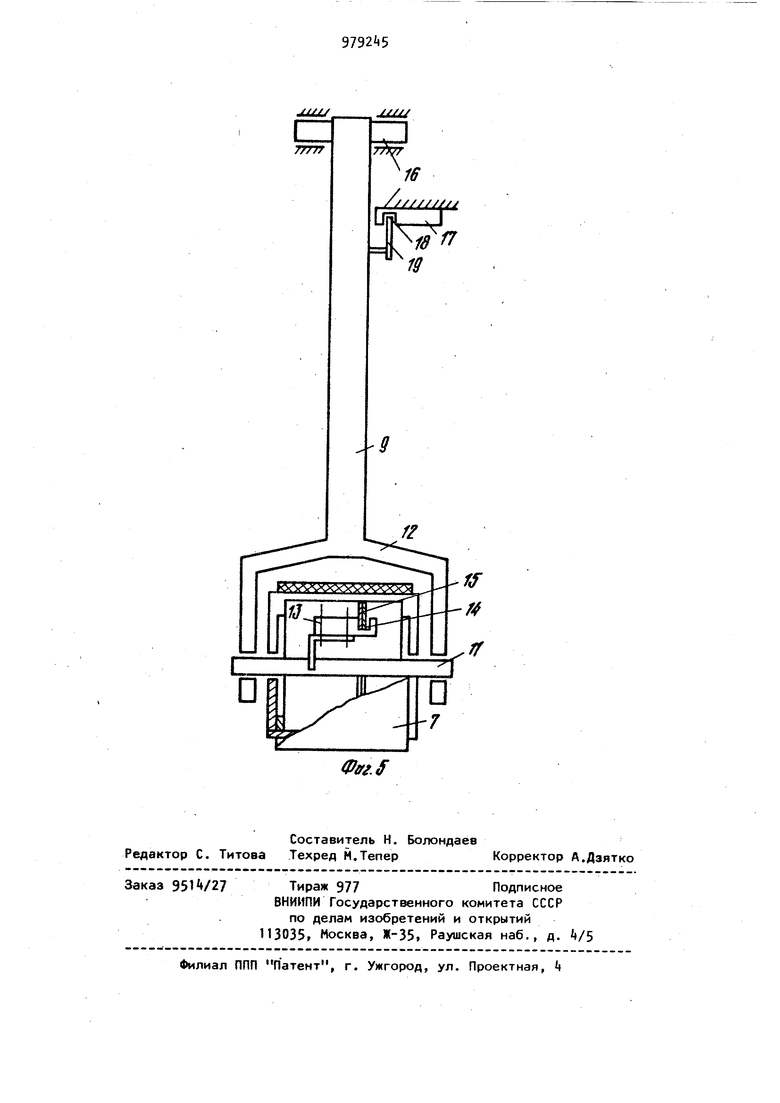
На фиг. 1 изображена структурная схема устройства; на фиг. 2 - симметричное расположение груза в полувагоне; на фиг. 3 то же, несиммет-. ричное расположение груза при пострянной плотности груза; на фиг. k то же, при неодинаковой плотности груза; на фиг. 5 - датчик величины перемещения загружаемого полувагона.
Устройство содержит блок коррекции 1, к входам которого подключены датчик 2 величины перемещения и задатчик 3 величины перемещения загружаемого полувагона. Выход блока коррекции 1 соедик ен с входом блока А сравнения, выход которого соединен с приводом затвора 5 разгрузочной емкости 6. Датчик 2 величины перемещения содержит ролик 7, конечный выключ тель 8, рычаг 9 и счетчик 10, рычаг 9 закреплен, например, на разгрузочной емкости 6, которая может перемещаться в вертикальном направлении при изменении высоты очередного-нагружаемого полувагона. При этом в процессе загрузки полувагона ролик 7 постоянно касается верхнего обвода кузова полувагона и может вращаться при его перемещении.
Основные элементы датчика 2 величи ны перемещения загружаемого полувагона - это ролик 7 и рычаг 9.
Неподвижная ось 11 ролика 7 закреплена на вилке 12 рычага 9. Преобразование в электрические сигналы угла поворота ролика 7, а следовательно, и текущего значения величины перемещения загружаемого полувагона, по которому катится ролик 7 возможно, например, путем установки на оси 11 бесконтактного конечного выключателя 13, через щель Н которого проходят при вращении ролика 7 зубцы 15, равномерно закрепленные внутри ролика 7 по длине окружности.
На опоре 16 рычага 9 закреплен еще один бесконтактный конечный выключатель 17 с щелы9 18, внутри оторой перемещается металлический флажок 19, установленный на рычаге 9.
Устройство работает следующим образом .
В блок коррекции 1 с выхода задатчика 3 величины перемещения вводится информация о длине L полувагона 20. Зта длина равна расстоянию от переднего борта полувагона до места, в котором должен образоваться подпор сыпучего материала, исходя из условия симметричности загрузки полувагона. На второй вход блока коррекции 1 поступают сигналы с выхода датчика величины перемещения.
Определяя длину л полувагона, на которую он переместился под разгрузочной емкостью за некоторый отрезок времени ut, блок коррекции 1 определяет скорость движения ЛГ загружаемого полувагона.
С выхода блока коррекции снимается сигнал, пропорциональный расстоянию LO, переместив на которое полувагон, необходимо открыть затвор 5 разгрузочной емкости .6. Длина LQ определяется из выражения
LV, - vt,
03
где t - известный отрезок времени между момейтом начала открытия затвора 5 и моментом образования подпора сыпучего материала при его загрузке в полувагон.
Сигнал, пропорциональный 1оэ, поступает на вход блока k сравнения, где сравнивается с сигналом, поступающим с выхода датчика 2 величин перемещения и пропорциональным фактическому расстоянию 1ф, пройденному полувагоном под разгрузочной емкостью 6.
При равенстве сигналов о заданном значении L и о фактически пройденном полувагоном расстоянии Lср в блоке сравнения k вырабатывается управляющий сигнал, в соответствии с которым открывается затвор 5 и начинается загрузка полувагона.
Датчик 2 величины перемещения работает следующим образом
При подходе передней стенки очередного полувагона под разгрузочную емкость 6 ролик 7 попадает на верхний обвод кузова полувагона. При этом рычаг 9 поднимается и флажок 19 входит в щель 18 бесконтактного выключателя 17. С выхода выключателя 17 на счетчик 10 поступает сигнал, разрешающий выполнение счета импульсов. При дальнейшем перемещении полувагона под погрузочным устройством ролик 7 катится по верхнему обводу кузова и металлические зубцы 15 последовательно попадают в щель 1 выключателя 13 При этом с выхода выключателя 13 снимается сигнал о перемещении полувагона на соответствующую единицу длины. Следовательно, число импульсных сигналов, поступающих на вход счетчика 10 с выхода выключателя 13 пропорционально длине полувагона, на которую последний переместился под разгрузочной емкостью 6, При проходе заднего борта полувагона под погрузочным устройством ролик 7 под действием силы тяжести опускается в межвагонный промежуток. Одновременно опускается также и рычаг 9 флажок 19 выходит из щели 18 выключателя 17. При этом снимается сигнал наличия полувагона под погрузочным устройством, и счетчик 10 перестает считать импульсы, которые мо гут поступать от бесконтактного конечного выключателя 13 вследствие не управляемого вращения ролика 7, свободно висящего в межвагонном промежутке. Для того чтобы уменьшить погрешности от возможного проскальзывания ролика 7 при его вращении по верхнем обводу полувагона, следует максималь но увеличить силу трения между роликом и полувагоном. Это достигается, например, путем нанесения резины на внешний обвод ролика. Таким образом, описанное выше техническое решение позволяет осуществить симметричную погрузку сыпучих и кусковатых материалов в полувагоны при непрерывном их перемещении и упрощении погрузочного оборудования. Симметричная погрузка железнодорож- ных полувагонов обеспечивает равномер ную нагрузку на оси полувагонов, что повышает срок их работы и снижает количество аварийных ситуаций на железных дорогах. Формула изобретения 1. Устройство для Погрузки сьитучих и кусковых материалов в железнодорожные полувагоны, содержащие разгрузочную емкость с приводным затвором, отличающееся тем, что, с целью повышения надежности путем обеспечения равномерности распределения нагрузок на оси полувагонов, оно снабжено датчиком и задатчиком величины перемещения загружаемого вагона, блоками сравнения и коррекции, причем входы,, блока коррекции соединены с вы-. ходами датчика и задатчика величины перемещения, выход блока коррекции, соединен с одним из выходов блока сравнения , второй вход которого соединен с датчиком величины перемещения, а выход блока сравнения .соединен с приводом затвора разгрузочной емкости. 2. Устройство по п. 1, отличающееся тем, чтб датчик перемещения полувагона состоит из закреп- ленного на опоре рычага с роликом, контактирующим с полувагоном, смонтированного с возможностью перемещения в вертикальной плоскости, конечного выключателя, установленного на опоре рычага, счетчика и преобразователя, выполненного в виде бесконтактного выключателя, установленного на оси вращение ролика, на внутренней поверхности которого равномерно по длине окружности закреплены металлические зубцы, проходящие через щель бесконтактного выключателя, который соединен со счетчиком. Источники информа1{ии, принятые во внимание при экспертизе 1.. Авторское свидетельство СССР If , кл. В 65 G 67/06, 1976 (прототип).
V
i --,
р . --рг
ф{/г,г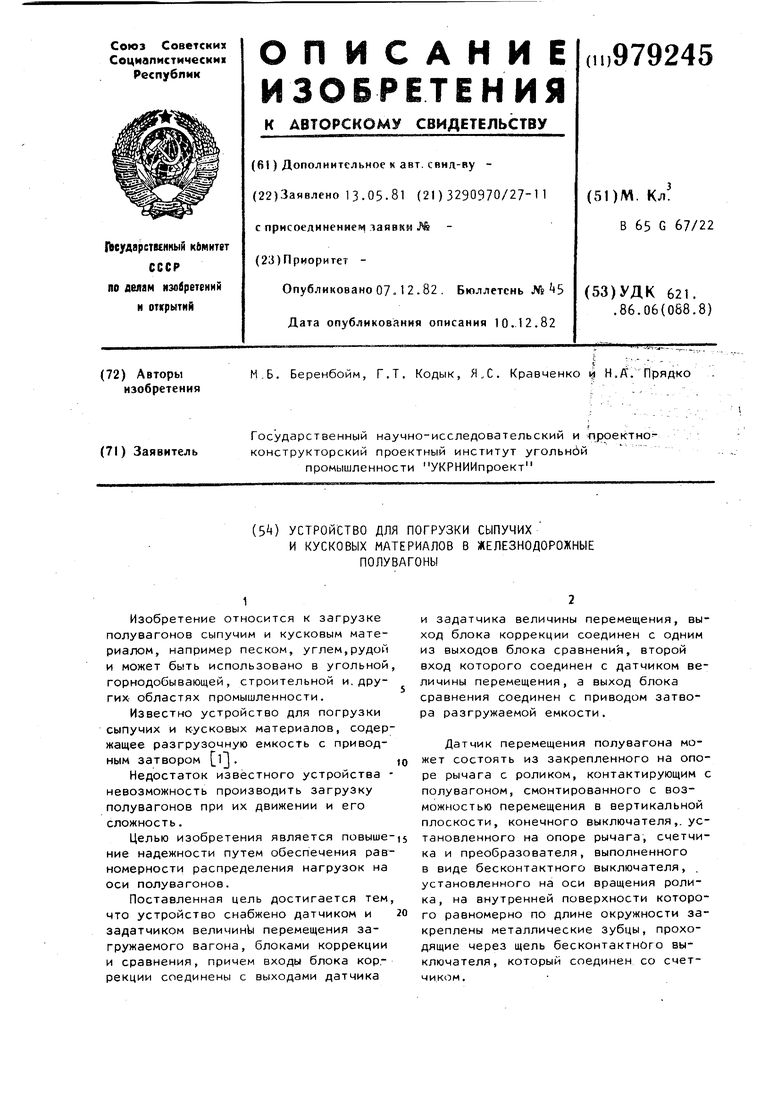
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для погрузки сыпучих материалов в железнодорожные полувагоны | 1980 |
|
SU919964A2 |
| Способ автоматической дозированной погрузки сыпучих материалов в движущиеся железнодорожные полувагоны | 1978 |
|
SU765163A1 |
| Способ дозированной погрузки сыпучих грузов | 1988 |
|
SU1664685A1 |
| Устройство для погрузки сыпучих материалов в железнодорожные транспортные средства | 1978 |
|
SU768735A1 |
| Устройство автоматического управленияуСТАНОВКОй для зАгРузКи ВАгОНОВдОзиРОВАННыМи пОРцияМи СыпучЕгОгРузА | 1979 |
|
SU814835A1 |
| Весодозировочное устройство для роторных экскаваторов | 1991 |
|
SU1816969A1 |
| Дозатор сыпучих и кусковых материалов | 1981 |
|
SU1010930A1 |
| Устройство автоматического управления установкой для загрузки вагонов дозированными порциями сыпучего груза | 1980 |
|
SU889580A1 |
| Способ погрузки сыпучего груза в полувагоны и устройство для его осуществления | 1976 |
|
SU740666A1 |
| Устройство для весового дозирования сыпучих материалов | 1982 |
|
SU1076766A1 |
//У/Х
tz
7ТТ77
