Изобретение относится к области механизации и автоматизации процессов пакетирования изделий, а именно к устройствам для кантовки и укладки длинномерных изделий в стопы, и может быть применено в строительной, тяжелой и металлургической отраслях промышленности.
Цель изобретения - расширение технологических возможностей путем обеспечения пакетирования изделий различных типоразмеров и конфигурации.
На фиг. 1 изображено устройство, вид спереди (слева от оси симметрии - при кантовке изделия типа листа, а справа - при кантовке изделий тина лонжерона); на фиг. 2 - то же, вид в плане {слева от оси симметрии нри кантовке листа, справа - нри кантовке лонжерона); на фиг. 3 - разрез А-А на фиг. 1 (пакетирование изделия тина листа); на фиг. 4 - то хче, кантуюш.ие рычаги в исходном положении; на фиг. 5 - разрез Б-Б на фиг. 1 (пакетирование изделий типа лонжерона); на фиг. 6 - сечение В-В на фиг. 1; на фиг. 7 - сечение Г-Г (повернуто) на фиг. 5.
Устройство для пакетирования изделий содержит смонтированные на основании 1 25 опоры 2 с механизмами 3 подачи изделий 4, стойки 5 с кантующими рычагами 6 и 7. установленные между опорами 2, привод 8 поворота кантующих рычагов 6 и 7 и подъемного приемного,стола 9. Кантующие рычаги 6 и 7 каждой стойки 5 соединены между стойками 5 валами 11. Привод 8 имеет электродвигатель 12, соединенный с зубчатым редуктором 13, вал 14, снабженный шестерней 5, взаимодействующий с выходным валом зубчатого редуктора 13. На одном конце вала установлен кривошип 16 с пальцем 17, взаимодействующим с кривошипно- щатунным механизмом 18, палец 19 которого жестко установлен на валу 20 с щестернек 21. На щестерне 15 эксцентрично закреплен палец 22, взаимодействующий с аналогичным кривощипно-шатунным механизмом 18, с щестерней 23 которого взаимодействует зубчатое колесо 24, установленное на одном конце вала 25. Другой конец вала 25 установлен в корпусе
При включении электродвигателя 12 редуктор 13 поворачивает щестерню 15 с пальцем 22 и через вал 14 кривошип 16 с пальцем 17. Пальцы 22 и 17 воздействуют на криво- шипно-шатунные механизмы 18, которые через шестерни 21 и 23 осуществляют поворот валов 25. Валы 25 через конические редукторы 10 осуществляют поворот кантующих рычагов 6 и 7 навстречу друг другу. Рычаги 6 и 7 захватывают изделие 4 и, когда кривошипно-шатунные механизмы переходят в крайнее положение, занимают крайнее положение (примерно 5° после перехода вертикальной плоскости, проходящей перпендикулярно основанию Г). Изделие 4 в это время переходит на кантующие рычаги 7, и затем рычаги 6 и 7 возвращаются в исходное положение. Изделие 4 укладывается на опоры 2 и механизмом 3 подачи смещается на подъемный приемный стол 9, который в дальнейшем опускается на толщину изделия 4.
При пакетировании изделий 4 типа лонжеронов кантующие рычаги 6 и 7 разведены и находятся в своих крайних нижних по.30
35
40
кантующего рычага 6 и на торце имеет ку- ложениях. Порщни 29 силовых цилиндров
лачки 26. Внутри вала 11 и корпусов кантующих рычагов 7 проходит щток 27, жестко соединенный с фиксатором 28, установленным с возможностью осевого перемещения и передачи крутящего момента в корпусе кантующего рычага 6, и с поршнем 29 силового цилиндра 30, смонтированного в корпусе кантующего рычага 6 другой стойки 5. Устройство снабжено цилиндрическим редуктором 31 с полыми входным 32 и выходным 33 валами. На выходном валу 33 с возможностью поворота относительно него смонтирован рычаг 34 с пазом 35, несущий управляемый захват 36. Внутри вала 33 с
SO
55
30 удерживают фиксаторы 28 в положении, исключающем взаимодействие их с кулачками 26 валов 25. Поршни 39 силовых цилиндров 40 вводят пальцы 38 в пазы 35 рычагов 34. Первое изделие 4 (лонжерон) .механизмом 3 подачи перемещают по онорам 2 на подъемный приемный стол 4. При подходе следуюп его лонжерона к точке кантования включаются захваты 36, а затем электродвигатель 12 через редуктор 13 поворачивает щестерню 15 с пальцем 22 и через вал 14 кривощип 16 с пальцем 17. Пальцы 22 и 17 воздействуют на кривошипно-шатунные механизмы 18, которые через шестерни 21
5
0
5
возможностью осевого перемещения смонтирован щток 37, одним концом жестко соединенный с пальцем 38, взаимодействующим с пазом 35 рычага 34, а другим концом - с поршнем 39 силового цилиндра 40, смонтированного внутри вала 33.
Полым входным валом 32 редуктор 31 установлен на валу 25 с возможностью перемещения по валу 25 от редуктора 41 посредством передачи винт-гайка 42. Для исклю- 0 чения разворота редуктора 31 устройство имеет направляюплую 43.
Устройство для пакетирования изделий работает следующим образом.
В исходном положении кантующие рычаги 6 и 7 и рычаги 34 разведены и находятся в крайних нижних положениях. Порщни 29 силовых цилиндров 30 удерживают штоки 27 с фиксаторами 28 в зацеплении с кулачками 26 валов 25.
Порщни 39 силовых цилиндров 40 удерживают пальцы 38 в назах 35 рычагов 34.
Изделие механизмом 3 подачи переме- плают в зону действия кантующих рычагов 6 и 7 по онорам 2.
При включении электродвигателя 12 редуктор 13 поворачивает щестерню 15 с пальцем 22 и через вал 14 кривошип 16 с пальцем 17. Пальцы 22 и 17 воздействуют на криво- шипно-шатунные механизмы 18, которые через шестерни 21 и 23 осуществляют поворот валов 25. Валы 25 через конические редукторы 10 осуществляют поворот кантующих рычагов 6 и 7 навстречу друг другу. Рычаги 6 и 7 захватывают изделие 4 и, когда кривошипно-шатунные механизмы переходят в крайнее положение, занимают крайнее положение (примерно 5° после перехода вертикальной плоскости, проходящей перпендикулярно основанию Г). Изделие 4 в это время переходит на кантующие рычаги 7, и затем рычаги 6 и 7 возвращаются в исходное положение. Изделие 4 укладывается на опоры 2 и механизмом 3 подачи смещается на подъемный приемный стол 9, который в дальнейшем опускается на толщину изделия 4.
При пакетировании изделий 4 типа лонжеронов кантующие рычаги 6 и 7 разведены и находятся в своих крайних нижних по0
5
0
ложениях. Порщни 29 силовых цилиндров
ложениях. Порщни 29 силовых цилиндров
30 удерживают фиксаторы 28 в положении, исключающем взаимодействие их с кулачками 26 валов 25. Поршни 39 силовых цилиндров 40 вводят пальцы 38 в пазы 35 рычагов 34. Первое изделие 4 (лонжерон) .механизмом 3 подачи перемещают по онорам 2 на подъемный приемный стол 4. При подходе следуюп его лонжерона к точке кантования включаются захваты 36, а затем электродвигатель 12 через редуктор 13 поворачивает щестерню 15 с пальцем 22 и через вал 14 кривощип 16 с пальцем 17. Пальцы 22 и 17 воздействуют на кривошипно-шатунные механизмы 18, которые через шестерни 21
и 23 осуществляют поворот валов 25. Валы 25 через полые входные валы 32 поворачивают выходные валы 33, которые осуществляют поворот рычагов 34. Осуществляют кантовку лонжерона 4 в зеркальное положение и укладку его в лонжерон 4, находящийся па столе 9. Затем отключают захваты 36 и рычаги 34 возвращают в исходное положение.
Следующий лонжерон 4 механизмом 3 подачи снова подается на подъемный стол 9, сдвигая предыдущий до тех пор, пока вертикальные полки уложенной пары лонжеронов войдут в контакт друг с другом. Затем процесс пакетирования повторяется.
Установка рычагов 34 с захватами 36 на требуемую длину изделия осуществляется передачей винт-гайка 42.
Устройство позволяет осуществлять пакетирование различных изделий из листового и профильного металлопроката с различными длинами.
Формула изобретения
Устройство для пакетирования изделий, содержащее смонтированные на основании опоры с механизмами подачи изделий, установленные между опорами стойки с пере0
г
0
5
мещающимися в противоположных направлениях кантующими рычагами, привод поворота кантующих рычагов с редуктором и кривощипно-щатуцным механизмом, кинематически связанным с кантующими рычагами посредством вала, отличающееся тем, что, с целью расщирения технологических возможностей путем обеспечения пакетирования изделий различных типоразмеров и конфигураций, устройство снабжено рычагами с торцовыми захватами и пазами на торцах, цилиндрическими редукторами с полыми входным и выходным валами, при этом входной вал каждого редуктора установлен на валу привода поворота кантующих рычагов с возможностью перемещения относительно его продольной оси, каждый рычаг с торцовым захватом установлен на выходном валу соответствующего цилиндрического редуктора, внутри выходного вала с возможностью взаимодействия с пазом рычага смонтирован приводной фиксатор, на кантующем рычаге смонтирован второй приводной фиксатор, причем на торце конца вала привода поворота, установленного в кантующем рычаге, закреплен кулачок, установленный с возможностью взаимодействия с вторым приводным фиксатором кантующего рычага.
J7
25
. 2
ЗГ
Рычаги сдедены
1292949 f(-A
PblQOZU
расходятся 7
3

| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ ВЫВЕРТЫВАНИЯ РУКАВИЦ И ДРУГИХ ПОДОБНЫХ ИЗДЕЛИЙ | 1965 |
|
SU170012A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Кантователь толстых листов на 180 | 1978 |
|
SU774650A1 |
| Кантователь сортового проката | 1981 |
|
SU994069A1 |
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| Кривошипно-шатунный механизм | 1980 |
|
SU998807A1 |
| АВТОМАТИЧЕСКИЙ УКЛАДЧИК СТАЛЬНЫХ ХОЛОДНОГНУТЫХ ПРОФИЛЕЙ ТИПА П И С | 2024 |
|
RU2828529C1 |
| Захват-кантователь тяжеловесных изделий | 1976 |
|
SU602465A1 |
| Автоматическая линия погрузки кирпича на печные вагонетки | 1983 |
|
SU1159787A1 |
| Многопозиционный станок для отгибки фланцев и зиговки полых деталей из листового материала | 1982 |
|
SU1044382A1 |


Изобретение относится к области механизации и автоматизации процессов пакетирования изделий. Целью изобретения является расширение технологических возможностей. Устройство содержит торцовые захваты 34 и кантующие рычаги (КР), кинематически соединенные с одним приводом. При работе КР отключают приводные фиксаторы торцовых захватов и включают приводные фиксаторы КР. Фиксаторы кинематически взаимодействуют с соединительным валом привода поворота. При изменении длины пакетируемых заготовок 4 торцовые захваты разводят приводом поворота. 7 ил. ..(Ш Г г (Л to CD to CD CD /// /// /// /// /// /// /// /// /// /// /// /// /// /// /// /// фиг.5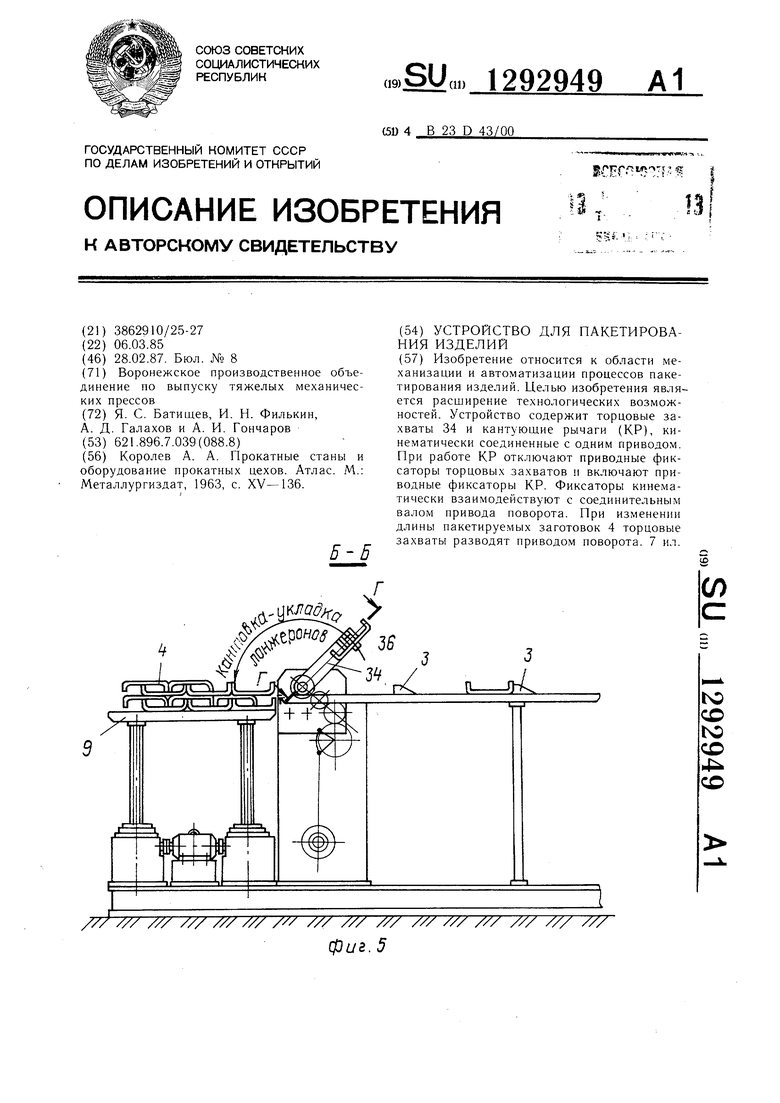
Рычави /за зё едены
.а
сходятся
2ii
Ю 3029
Г- Гпобернуто
фиг 7
| Королев А | |||
| А | |||
| Прокатные станы и оборудование прокатных цехов | |||
| Атлас | |||
| М.: Металлургиздат, 1963, с | |||
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |
| Б-Б | |||
