что в полости корпуса размещен клапан в виде втулки 2 с поперечной перегородкой 3, в которой выполпено дросселирующее отверстие 4. Перегородка 3 образует в корпусе полости
5и 6, которые капалами 7 и 8 соответственно связаны с системой вакуу- мирования и присоской 9. Полости 5 и
6сообщены между собой дросселирующим отверстием 4, а с атмосферой - калиброванными отверстиями 11 и 12. Когда присоска 9 находится на расстоянии h от детали 10, то засасываемый воздух поднимает втулку 2
и перегородка 3 упирается в торец 17 трубки 13, которая прикреплена к торцу 15 корпуса 1. Торец 15 трубки 13 частично перекрывает дроссе1
Изобретение относится к технологическому оборудованию, в частности к захватным устройствам.
Целью изобретения является повышение надежности захвата деталей путем устранения посторонних частиц из полости корпуса за счет выполнения в корпусе отверстий для подачи воздуха.
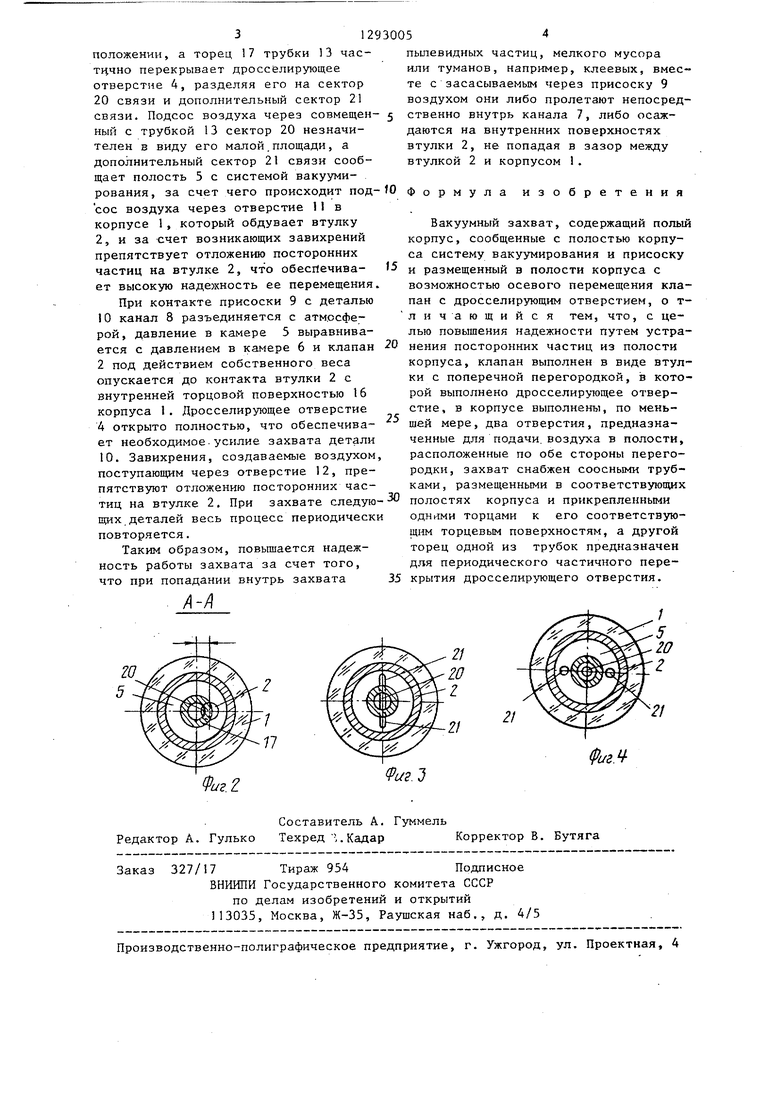
На фиг. 1 изображен захват, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 и 4 - варианты выполнения дросселирующего отверстия соответственно.
Вакуумный захват содержит корпус 1, размещенный в корпусе I клапан в виде втулки 2 с поперечной перегородкой 3, в которой выполнено дросселирующее отверстие 4. Втулка 2 с перегородкой 3 образует полости 5 и 6 причем полость 5 посредством канала 7 в корпусе 1 сообщена с системой дакуумирования, а полость 6 посредством канала 8 с корпусе 1 сообщена с присоской 9, предназначенной для захвата деталей 10. В корпусе 1 выт полнено, по меньшей мере, два отверстия 11 и 12, предназначенные для подачи воздуха, например, от вентиляционной системы (не показана) в полости 5 и 6.
93005
лирующее отверстие 4, разделяя его на сектор связи и дополнительный сектор связи. Подсос воздуха через сектор связи незначителен ввиду его малой площади. Одновременно воздух засасывается через отверстие 11 в корпусе 1, а возникающие при этом завихрения обдувают втулку 2, препятствуя оседанию на ней посторонних частиц. При соприкосновении присоски 9 с деталью i О давление в полостях 5 и 6 выравнивается и втулка 2 под действием собственного веса опускается на торец 16 корпуса. Дросселирующее отверстие полностью открывается, что обеспечивает необходимое усилие для удержания детали 10. 4 ил.
O
5
Захват также содержит соосные трубки 13 и 14, размещенные соответственно в полостях 5 и 6 и прикрепленные одними своими торцами (не обозначены) к соответствующим торцовым поверхностям 15 и 16 корпуса 1, другие торцы 17 и 18 трубок 13 и 14 находятся внутри втулки 2.
Дросселирующее отверстие 4 выполнено в перегородке 3 со смещением относительно оси 19 трубок 13 и 14. Дросселирующее отверстие 4 может быть выполнено также щелевидной формы, причем его длина в этом случае превышает диаметр трубок 13 и 14, или в виде ряда отверстий, в этом случае одно из отверстий выполнено в перегородке 3 по оси 19, а другие выполнены на расстоянии, превышающем диаметр трубок 13 и 14, Сектор 20 связи и дополнительный сектор 21 выполнен в виде сверления в перегород- ке 3. Отверстия 11 и 12 при этом со- г общены с системой подачи очищенного воздуха.
Захват работает следующим образом.
В исходном положении присоску 9 размещают на расстоянии h от поверхности детали 10. При этом воздух, засасываемый через присоску 9, канал 8 и трубку 14 внутрь захвата, поднимает и удерживает втулку 2 в верхнем
0
0
положении, а торец 17 трубки 13 час- тцчно перекрывает дросселирующее отверстие 4, разделяя его на сектор 20 связи и дополнительный сектор 21 связи. Подсос воздуха через совмещен- ный с трубкой 13 сектор 20 незначителен в виду его малой.площади, а дополнительный сектор 21 связи сообщает полость 5 с системой вакууми- рования, за счет чего происходит под сое воздуха через отверстие 1I в корпусе 1, который обдувает втулку 2, и за счет возникающих завихрений препятствует отложению посторонних частиц на втулке 2, что обеспечивает высокую надежность ее перемещения
При контакте присоски 9 с деталью 10 канал 8 разъединяется с атмосферой, давление в камере 5 выравнивается с давлением в камере 6 и клапан 2 под действием собственного веса опускается до контакта втулки 2 с внутренней торцовой поверхностью 16 корпуса 1. Дросселирующее отверстие 4 открыто полностью, что обеспечивает необходимое.усилие захвата детали 10. Завихрения, создаваемые воздухом поступающим через отверстие 12, препятствуют отложению посторонних частиц на втулке 2. При захвате следующих деталей весь процесс периодическ повторяется.
Таким образом, повьшается надежность работы захвата за счет того, что при попадании внутрь захвата
п
15
5 fO
35
20
25
30
пылевидных частиц, мелкого мусора или туманов, например, клеевых, вместе с засасываемым через присоску 9 воздухом они либо пролетают непосредственно внутрь канала 7, либо осаждаются на внутренних поверхностях втулки 2, не попадая в зазор между втулкой 2 и корпусом 1.
Формула изобретения
Вакуумный захват, содержащий полый корпус, сообщенные с полостью корпуса систему вакуумирования и присоску и размещенный в полости корпуса с возможностью осевого перемещения клапан с дросселирующим отверстием, о т- л и чающийся тем, что, с целью повышения надежности путем устранения посторонних частиц из полости корпуса, клапан выполнен в виде втулки с поперечной перегородкой, в которой выполнено дросселирующее отверстие, в корпусе выполнены, по меньшей мере, два отверстия, предназначенные для подачи, воздуха в полости, расположенные по обе стороны перегородки, захват снабжен соосными трубками, размещенными в соответствующих полостях корпуса и прикрепленными торцами к его соответствующим торцевым поверхностям, а другой торец одной из трубок предназначен для периодического частичного перекрытия дросселирующего отверстия.
Фиг.г
2i
(Риг.д
Фиг.ЧСоставитель А, Гуммель Редактор А. Гулько Техред ,. Кадар Корректор В. Бутяга
Заказ 327/17 Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4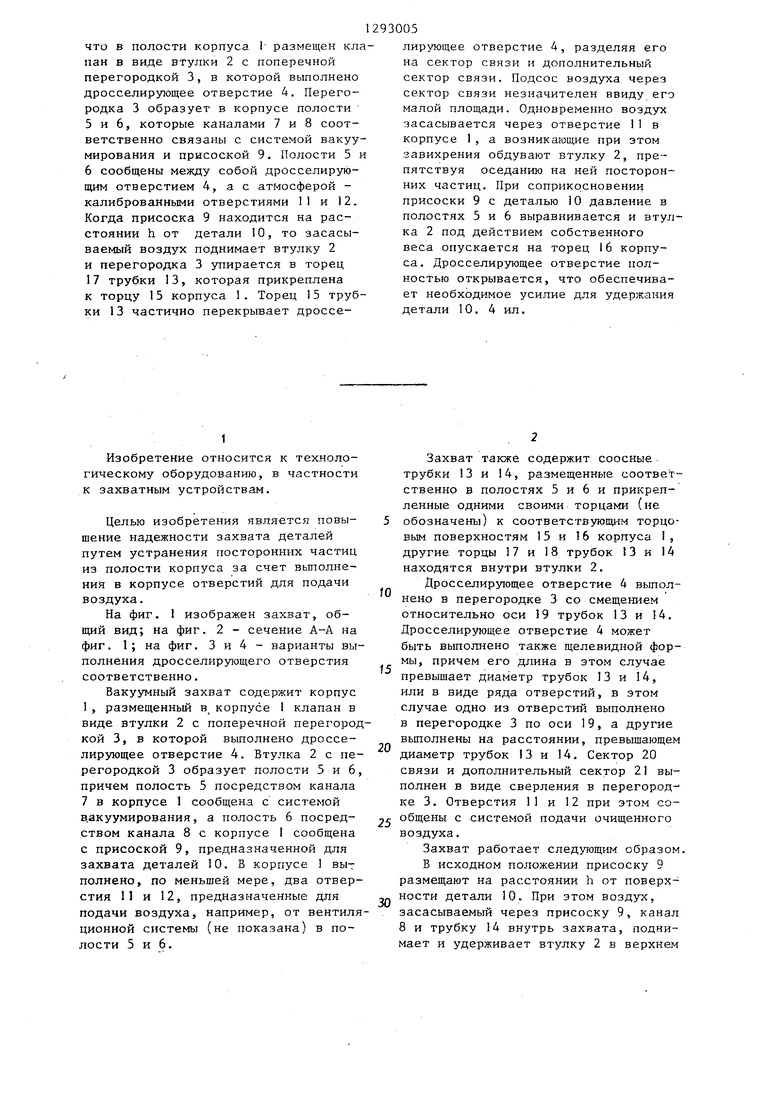
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАКУУМНЫЙ ПРИСОС | 1992 |
|
RU2067550C1 |
| ДОИЛЬНЫЙ АППАРАТ | 1991 |
|
RU2013045C1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| Вакуумный захватный орган | 1986 |
|
SU1386446A1 |
| Пневматический захватный орган для плоских деталей | 1981 |
|
SU988423A1 |
| ДАТЧИК ГИДРАВЛИЧЕСКИХ КОЛЕБАНИЙ | 1998 |
|
RU2133949C1 |
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| Глушитель шума выхлопа газового потока | 1987 |
|
SU1483057A1 |
| ТЕРМОГАЗОХИМИЧЕСКАЯ УСТАНОВКА ДЛЯ УТИЛИЗАЦИИ ТВЕРДЫХ БЫТОВЫХ ОТХОДОВ | 2009 |
|
RU2423647C1 |
| ГИДРАВЛИЧЕСКАЯ ОПОРА ПОДВЕСКИ СИЛОВОГО АГРЕГАТА АВТОТРАНСПОРТНОГО СРЕДСТВА С АКУСТИЧЕСКОЙ ФУНКЦИЕЙ | 2011 |
|
RU2490143C2 |
Изобретение относится к технологическому оборудованию. Целью изобретения является повьппеиие надежности захвата деталей путем устранения посторонних частиц из полости корпуса за счет выполнения в корт пусе вентиляционных отверстий. Сущность изобретения заключается в том. 5 (Л с Фиг.1
| Вакуумный захват | 1976 |
|
SU567596A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Вакуумный захват | 1977 |
|
SU632562A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
