Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления приводом механизмов передвижения подъемно-транспортных средств.
Цель изобретения - повьшение надежности устройства.
На чертеже приведена функциональная схема устройства.
Устройство для управления пциво- дом механизма передвижения подъемно- транспортного средства содержит датчик 1 длины грузового каната, подключенный к входу блока 2 извлечения квадратного корня. Регулятор 3 скорости и выход масштабного усилителя 4 подключены к входу апериодического усилителя 5, выход которого соединен с входом усилителя 4, одним входом сумматора 6, подключенного к управляющему входу привода механизма передвижения (не показано) и входу второго апериодического усилителя 7, выход которого соединен с другим входом масштабного усилителя 4 и другим входом сумматора 6. В цепи обратной связи каждого усилителя 5,7 включен соответствующий блок 8 перемножения, входы которого соединены с выходом соответствующего усилителя 5,7 и выходом блока 2. Выход блока 8 соединен через потенциометр 9 с конденсатором 10, Усилители 5 и 7 выполнены с операционным усилителем 11, к входу которого подключен резистор 12, а в цепь обратной связи включен резистор 13,
Устройство для управления привоом механизма передвижения подъемно- ранспортного средства работает ледующим образом,
В режиме торможения привода сигал регулятора 3 скорости практически скачком достигает максимального значения и поступает на вход первого апериодического усилителя 5, выходой сигнал последнего поступает на вход второго апериодического усилитея, а выходные сигналы обоих усилителей 5,7, характер изменения которых зависит от их постоянных времени, ропорциональных корню квадратному из длины грузового каната, через усиВНИИПИ Заказ 551/23
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
5
0
5
0
5
0
5
0
литель 4 поступают на вход первого апериодического усилителя 5 и вместе с выходным сигналом регулятора 3 скорости - на входы сумматора 6, образуя суммарный входной сигнал управления приводом.
При этом отклонение груза характеризуется апериодической зависимостью без колебаний и пеферегулирова- ний.
В режиме разгона привода устройство работает аналогично
Формула изобретения
Устройство для управления приводом механизма передвиягения подъемно-транспортного средства, содержащее датчик длины грузового каната механизма подъема груза, подключенный к входу блока извлечения квадратного корня, блоки перемножения, один вход одного из которых соединен с выходом блока извлечения квадратного корня, масштабный усилитель, регулятор скорости и сумматор, вход которого связан с управляющим входом привода механизма передвижения, отличающееся тем, что, с целью повьщ1ения надежности, оно снабжено апериодически:ми усилителями, вход первого из которых соединен с выходом регулятора скорости и выходом масштабного усилителя, а выход - с одним входом сумматора, одним входом блока перемножения, одним входом масштабного усилителя и входом другого апериодического усилителя, выход которого подключен к второму входу сумматора, другому входу масштабного усилителя и другому входу блока перемножения, выход которого включен в цепь обратной связи последнего апериодического усилителя, причем другой вход второго блока перемножения соединен с выходом блока извлечения квадратного корня, а выход подключен к входу первого апериодического усилителя, при этом выход регулятора скорости соединен с третьим входом сумматора.
Тираж 721
Подписное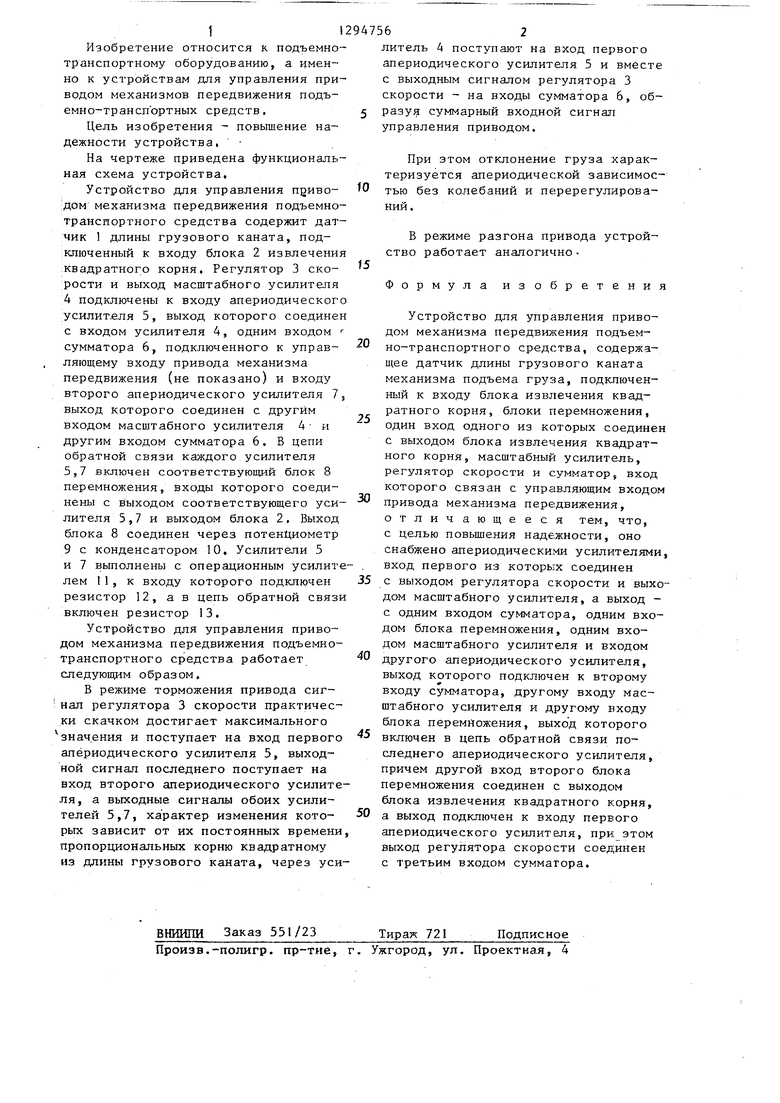
Изобретение предназначено для гашения колебаний груза. Цель изобретения - повышение надежности устройства. Датчик I длины каната через блок 2 извлечения квадратного корня подключен в цепи обратной связи апериодических усилителей 5 и I1, последний из которых связан с цепью управления приводом. При торможении механизма датчик через блок 2 подает на усилители П и 5 корректирующей сигнал, в результате исключается колебание груза. 1 ил. to CD 4 СЛ О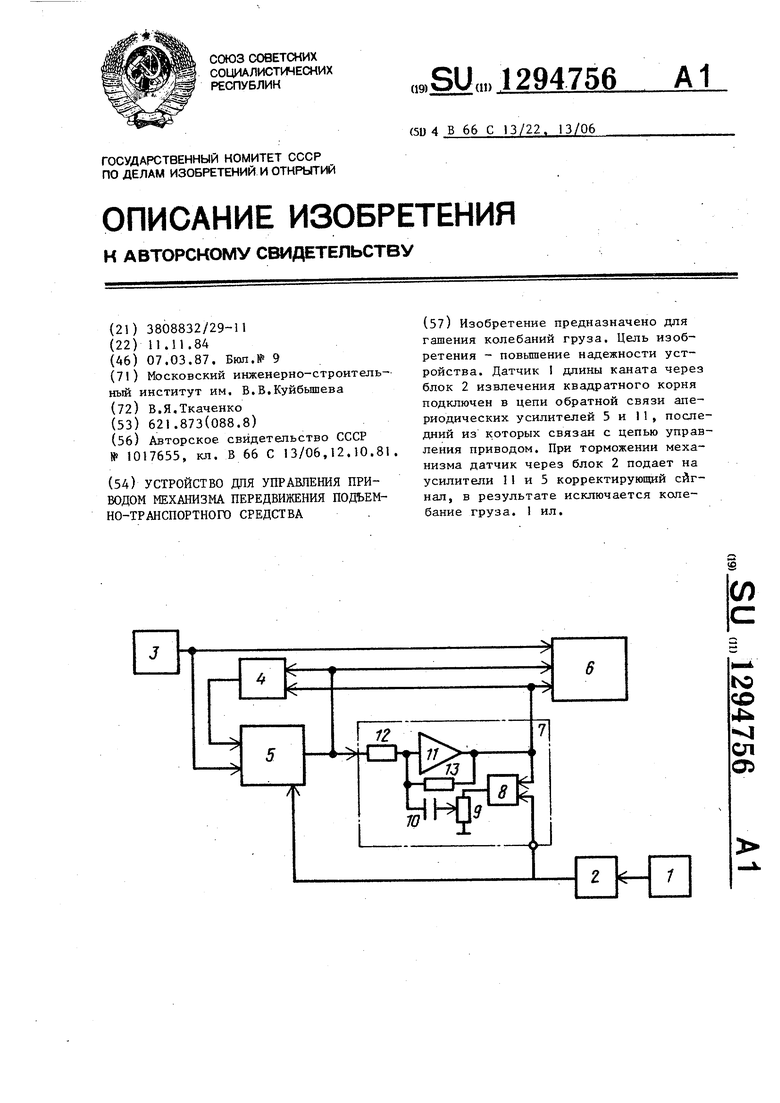
| Устройство для управления грузоподъемным транспортным средством с гибкой подвеской груза | 1981 |
|
SU1017655A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
