1. 1294757
Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления приводами механизмов передвижения подъемно-транспортных средств.
Цель изобретения - повьпдение надежности устройства.
На чертеже приведена функциональная схема устройства.
При достижении максимального значе ния выходного сигнала интегратора 5 си налы на входах усилителя 2, поступающие с выхода регулятора 1 скорости и по каналу обратной связи, выравниваются с противоположными знаками, выходное напряжение этого усилителя становится равным нулю, выходной сигнал интегратора 5 остается неизУстрдйство для управления право- О менным на максимальном уровне, предом механизма передвижения подъемно- транспЬртного средства содержит регулятор 1 скорости, подкпюченньй к входу операционного усилителя 2, в цепи обратной связи которого включен блок ограничения сигнала. Усилитель 2 подключен через операционный усили- т;ель 4 к входу интегратора 5, выполненному на операционном усилителе, выход которого соединен с входом усилителя 2 и управляющим входом привода 6 механизма передвижения. В цепь обратной связи усилителя 4 включен блок 7 перемножения, выходы которого соединены с выходом усилителя 4 и выходом блока 8 извлечения корня, вход которого подсоединен к датчику 9 длины грузового каната. Конденсатор 10 определяет время интегрирования усилителя.
Устройство для управления приводом механизма передвижения подъемно-транспортного средства работает следующим образом.
В начале торможения появляющийся на выходе регулятора 1 скорости сигнал поступает на вход усилителя 2„ работающего в релейном режиме, и вызывает появление на выходе этого усилителя максимального напряжения, которое через усилитель 4 поступает на вход интегратора 5, выходное напряжение которого при этом линейно изменяется во времени.
Выходной сигнал датчика 9 длины грузового каната через блок 8 извлечения корня поступает на вход блока 7 перемножения и обеспечивает изменение выходного напряжения усилителя 4 обратно пропорционально корню квад рйтному из длины грузового каната. При этом амплитуда колебаний груза не зависит от длины грузового каната и может быть выбрана в допустимых пределах увеличением постоянной времени иятегратора 5.
При достижении максимального значения выходного сигнала интегратора 5 сигналы на входах усилителя 2, поступающие с выхода регулятора 1 скорости и по каналу обратной связи, выравниваются с противоположными знаками, выходное напряжение этого усилителя становится равным нулю, выходной сигнал интегратора 5 остается неиз
кращается увеличение среднего значения отклонения груза и механизм переходит к равнозам€;дленному движению, а колебания груза и скорости характеризуются допустимым значением амплитуды. При приближении скорости к нулевому значению выходной сигнал регулятора 1 скорости становится равным нулю,выходной сигнал усилителя 2 снова достигает максимального значения, выходной сигнал интегратора 5 линейно умень шается и в результате переходных процессов,, аналогичных описанным, механизм останавливается и груз переходит к нулевЬму отклонению с допустимым значением амплитуды. Аналогичные процессы происходят при разгоне и равномерном .движении механизма, т.е. во всех режимах устройство ограничивает амплитуду колебений груза допустимым значением независимо от длины грузового каната,
Формула изобретения
Устройство для управления приводом механизма передвижения подъемно- транспортного средства, содержащее
датчик длины грузового каната, подключенный к входу блока извлечения квадратного корня, регулятор скорости, по крайней мере три операционных усилителя, включенных последовательно друг с другом, причем выход последнего усилителя связан с управляющим входом привода механизма передвижения, отлич ающее ся тем, что, с цеглью повышения надежности, оно снабжено блоком ограничения сигнала, включенным в цепь обратной связи первого операционного усилителя, один вход которого соединен с регулятором скорости, а другой - с
выходом последнего операционного усилителя, и кондесатором, включенным в цепь обратной связи последнего операционного усилителя, причем входы блока перемножения подк1тючены к вы312947574
ходу .блока извлечения квадратного , операхщонногоусилителя, авыход-квы- корня и к выходу Bfoporoходу второго операционного усилителя.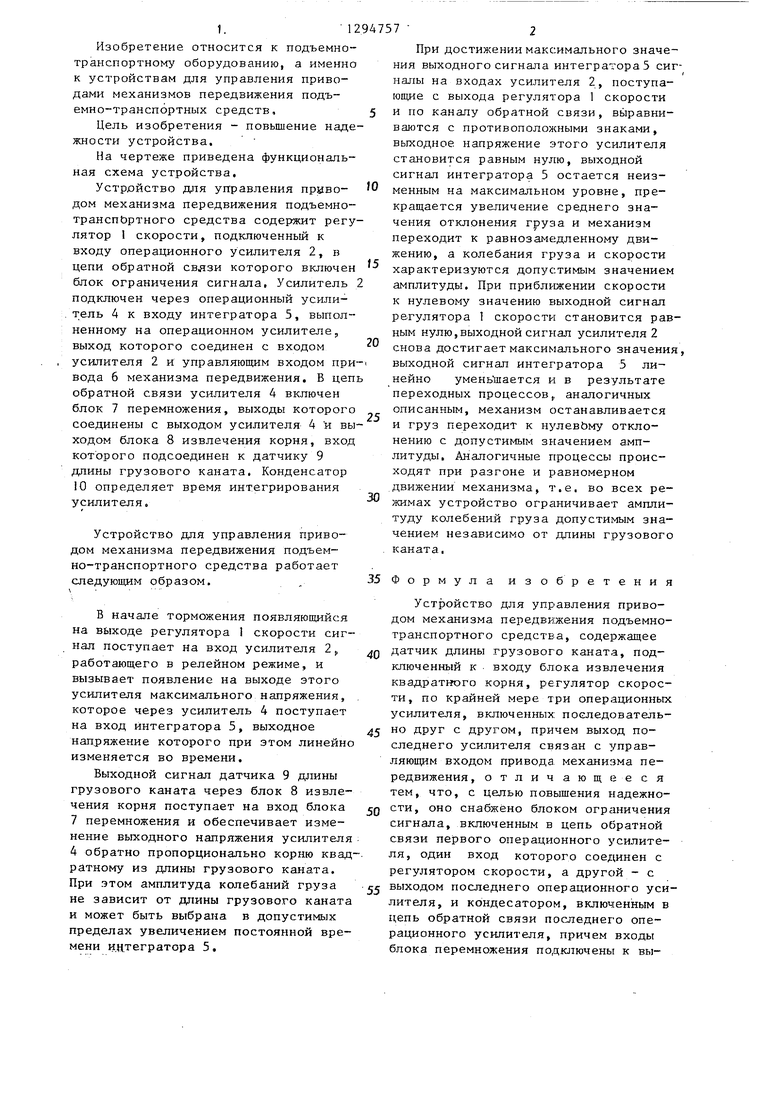
Изобретение предназначено для ограничения раскачивания груза. Цель изобретения - повьшение надежности устройства. Датчик 9 длины грузового каната через блок 8 извлечения квадратного корня включен в цепь обратной связи операционного усилителя 4, включенного в свою очередь в цепь управления приводом. При торможении механизма датчик 9 через блок 8 подает на усилитель 4 корректирующий сигнал, в результате исключается колебание груза. 1 ил. ю х 4; СП vj
| Устройство для управления грузоподъемным транспортным средством с гибкой подвеской груза | 1981 |
|
SU1017655A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
