Изобретение относится к деталям машин, а именно к муфтам включения рабочих органов, и может быть использовано преимущественно в трубообра- батывающей и лесообрабатывающей про- мьшленности для поштучной выдачи длинномеров.
Цель изобретения - расширение .технологических возможностей путем увеличения числа .рабочих органов и их выборочного включения и снижение металлоемкости.
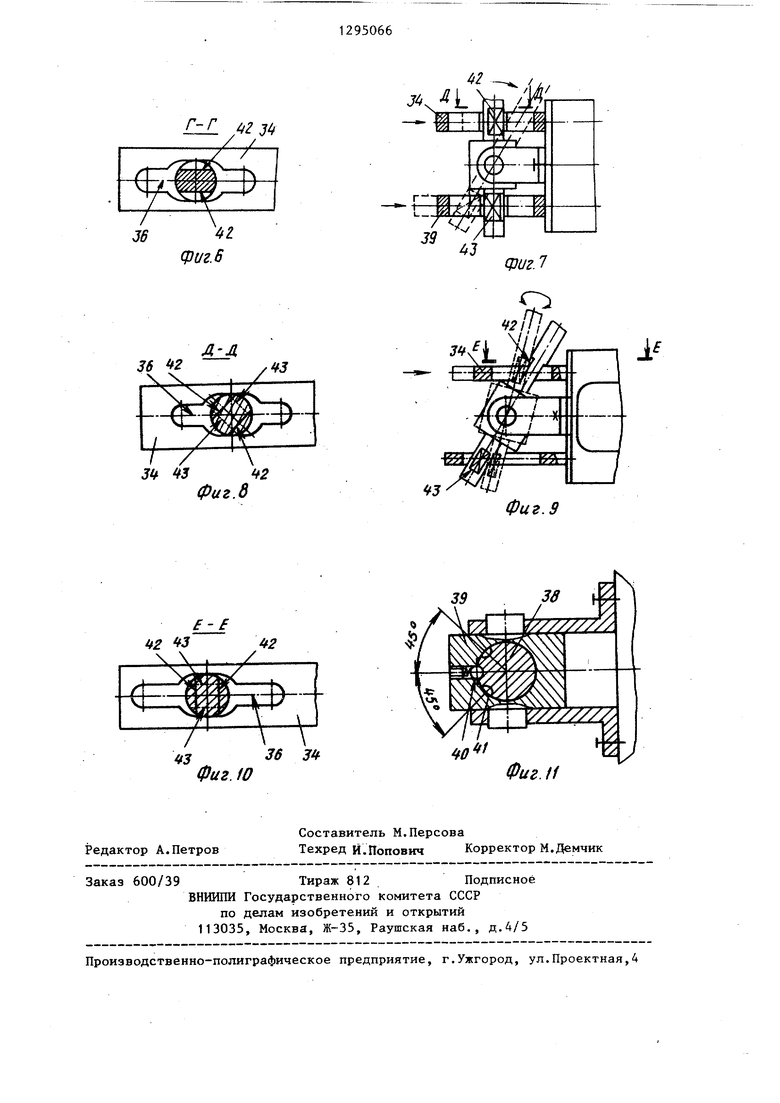
На фиг.1 схематично изображено предлагаемое устройство, общий вид в плане; на фиг,2 вид А на фиг. Г, на фиг.З разрез Б-Б на фиг.Т, на фиг.4- узел I на фиг.З; на фиг.З - разрез В-В на фиг.З; на фиг.6 - разрез Г-Г на фиг. 5, на фиг. 7 - положение рычага для включения 1-3-й ветвей , на фиг. 8 - разрез Д-Д на фиг.; на фиг. положение рычага для включения 1-4-й ветвей; на фиг.10 - разрез Е-Е на фиг.9; на фиг.11 - фиксация рычага в оси качания.
Устройство для поштучной выдачи длинномерных изделий содержит приводную секцию 1, ряд рабочих транс- портирукндих гибких ветвей 2-4, смонтированных на раме 5 и снабженных узлом 6 включения (фиг.1 и 2).
Приводная секция 1 выполнена в виде пластинчатого транспортера и снабжена приводным валом 7, один конец которого соединен с приводом 8, а другой - проходит свободно через ступицу звездочки, установленной на ведущем валу 9 транспортной ветви 2, и снабжен шпонкой звездочки 10 для передачи крутящего момента валу 11. Звездочки приводной секции 1 посажены на шпонках на приводной вал 7.
Транспортирующие ветви 2-4 включают в себя ведомые звездочки 12, соединенные бесконечными гибкими транспортирующими элементами 13 с ведущими звездочками, установленными на валах 9, причем эти звездочки ветвей 2 и 3 свободно установлены на осях и их ступицы выполнены с шлица- ми .14, а звездочка 10 секции 4 жестк соединена с валом 15 (фиг. 1 и 3).
Выборочная передача крутящего момента транспортирующим гибким ветвям 2-4 устройства осуществляется узлом 6 включения посредством соединительных валов 11 и 15 (фиг.1 и 3).
Вал 11, предназначенный для выборочного включения транспортирующей
5
5 0
0
5 0
5 0
5
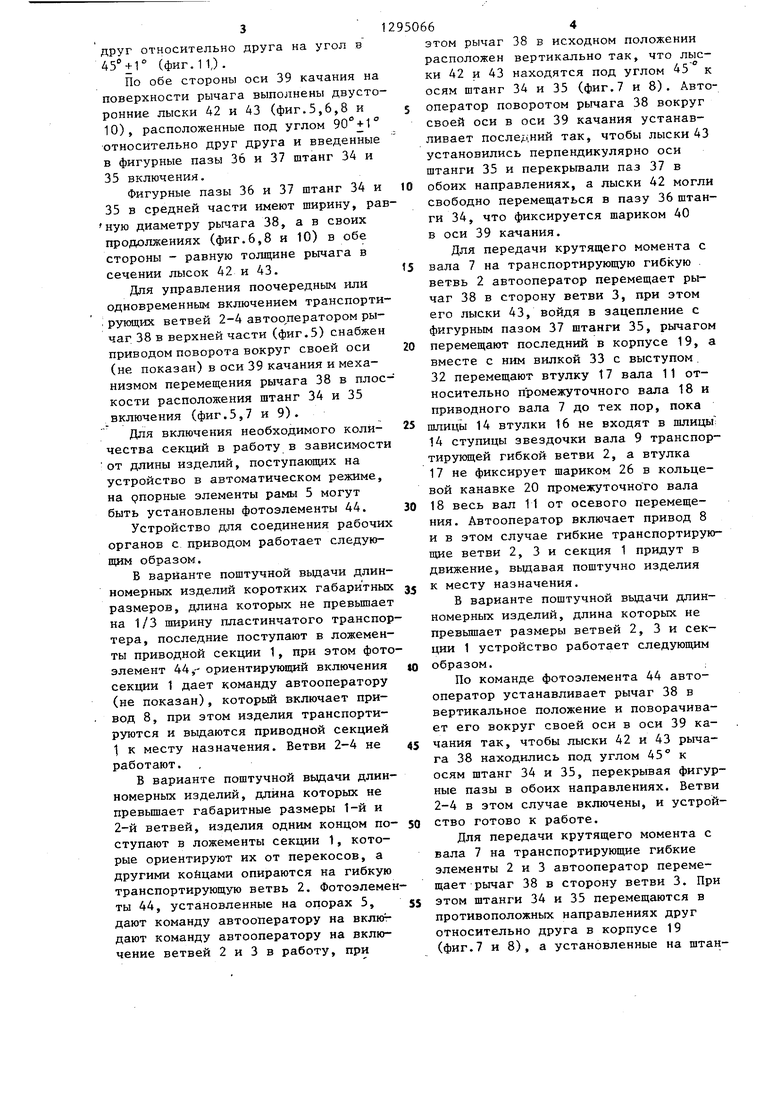
ветви 2 (фиг.З), содержит с одной стороны втулку 16 с шлицами 14, сопряженную с возможностью осевого перемещения по наружной поверхности конца приводного вала 7 и шпонке, а с другой стороны - втулку 17, сопряженную с наружной поверхностью промежуточного вала 18 узла 6 включения. Узел 6 включения содержит установленный с возможностью вращения (например, на подшипнике) в корпусе 19 (фиг. 5) промежуточньй вал 18, на на-
ружных поверхностях обеих концов KO-J торого выполнены кольцевые канавки 20-24 и размещены шпонки. На концах промежуточного вала 18 установлены с возможностью фиксированного осевого перемещения втулка 17, принадлежащая валу 11, и втулка 25, в которых смонтированы подпружиненные фиксирующие шарики 26 (фиг.4).
Вал 18 от осевого перемещения зафиксирован упором 27, который введен в кольцевую канавку 28 и установлен в корпусе 19 (фиг.З).
Втулка 25 выполнена в торцевой части с ступенчатыми шлицами 29 и 30 разной длины. Шлицы 30 предназначены для соединения с ответными шлицами 14 ступицы звездочки 10 ветви 3, а шлицы 29 предназначены для соединения с ответными шлицами 29,валика конца штанги 15 (фиг.5).
На наружных поверхностях втулок 17 и 25 выполнены кольцевые канавки 31, в которые помещены выступы 32 (фиг.З и 5) вилок 33, закрепленных болтами (на фиг.5 показано условно) на штангах 34 и 35, помещенных с возможностью осевого перемещения в корпус 19 узла 6 включения, причем концы штанг 34 и 35 выполнены с фигурными пазами 36 и 37 соответственно (фиг.5,6 и 8).
В фигурные пазы штанг введен двуплечий переключающий рычаг 38 (фиг.5), установленный с возможностью фиксированного поворота вокруг своей оси в ось 39 качания, закрепленную шарнирно в кронштейнах ( не показано) рамы корпуса 19 (фиг.5,7, 9 и 11). Фикса1и1Я поворота рычага 38 в оси 39 качания производится с помощью смонтированного в оси 39 качания подпружиненного шарика 40 (фиг.11), который попеременно вводится при вращении рычага 38 вокруг своей оси в гнезда 41, выполненные на поверхности рычага 38с смещением
друг относительно друга на угол в (фиг. 11,).
По обе стороны оси 39 качания на поверхности рычага выполнены двусторонние лыски 42 и 43 (фиг.5,6,8 и 10), расположенные под углом 90+1° относительно друг друга и введенные в фигурные пазы 36 и 37 штанг 34 и 35 включения.
Фигурные пазы 36 и 37 штанг 34 и 35 в средней части имеют ширину, рав ную диаметру рычага 38, а в своих продолжениях (фиг.6,8 и 10) в обе стороны - равную толщине рычага в сечении лысок 42 и 43.
Для управления поочередным или одновременным включением транспорти- , рукядих ветвей 2-4 автоо,ператором рычаг 38 в верхней части (фиг.5) снабжен приводом поворота вокруг своей оси (не показан) в оси 39 качания и механизмом перемещения рычага 38 в плоскости расположения штанг 34 и 35 включения (фиг.5,7 и 9).
Для включения необходимого коли- честна секций в работу в зависимости от длины изделий, поступающих на устройство в автоматическом режиме, на рпорные элементы рамы 5 могут быть установлены фотоэлементы 44.
Устройство для соединения рабочих органов с приводом работает следующим образом.
В варианте поштучной вьщачи длинномерных изделий коротких габаритных размеров, длина которых не превьшает на 1/3 пшрину пластинчатого транспортера, последние поступают в ложементы приводной секции 1, при этом фотоэлемент 44,- ориентирующий включения секции 1 дает команду автооператору (не показан), который включает привод 8, при этом изделия транспортируются и выдаются приводной секцией 1 к месту назначения. Ветви 2-4 не работают.
В варианте поштучной выдачи длинномерных изделий, длина которых не превьш1ает габаритные размеры 1-й и 2-й ветвей, изделия одним концом по- ступают в ложементы секции 1, которые ориентируют их от перекосов, а другими койцами опираются на гибкую транспортирующую ветвь 2. Фотоэлементы 44, установленные на опорах 5, дают команду автооператору на вклюг- дают команду автооператору на включение ветвей 2 и 3 в работу, при
этом рычаг 38 в исходном положении расположен вертикально так, что лыски 42 и 43 находятся под углом 45 к осям штанг 34 и 35 (фиг.7 и 8). Автооператор поворотом рычага 38 вокруг своей оси в оси 39 качания устанавливает последний так, чтобы лыски 43 установились перпендикулярно оси штанги 35 и перекрьшали паз 37 в обоих направлениях, а лыски 42 могли свободно перемещаться в пазу 36 штанги 34, что фиксируется шариком 40 в оси 39 качания.
Для передачи крутящего момента с вала 7 на транспортирующую гибкую ветвь 2 автооператор перемещает рычаг 38 в сторону ветви 3, при этом его лыски 43, войдя в зацепление с фигурным пазом 37 штанги 35, рычагом перемещают последний в корпусе 19, а вместе с ним вилкой 33 с выступом 32 перемещают втулку 17 вала 11 относительно промежуточного вала 18 и приводного вала 7 до тех пор, пока шлицы 14 втулки 16 не входят в 14 ступицы звездочки вала 9 транспортирующей гибкой ветви 2, а втулка
17не фиксирует шариком 26 в кольцевой канавке 20 промежуточно го вала
18весь вал 11 от осевого перемещения. Автооператор включает привод 8
и в этом случае гибкие транспортирующие ветви 2, 3 и секция 1 придут в движение, вьщавая поштучно изделия к месту назначения.
В варианте поштучной выдачи длинномерных изделий, длина которых не превышает размеры ветвей 2, 3 и секции 1 устройство работает следующим образом.
По команде фотоэлемента 44 автооператор устанавливает рычаг 38 в вертикальное положение и поворачивает его вокруг своей оси в оси 39 качания так, чтобы лыски 42 и 43 рычага 38 находились под углом 45° к осям штанг 34 и 35, перекрывая фигурные пазы в обоих направлениях. Ветви 2-4 в этом случае включены, и устройство готово к работе.
Для передачи крутящего момента с вала 7 на транспортирующие гибкие элементы 2 и 3 автооператор перемещает рычаг 38 в сторону ветви 3. При этом штанги 34 и 35 перемещаются в противоположных направлениях друг относительно друга в корпусе 19 (фиг.7 и 8), а установленные на штан5
rax ЗА и 35 вилки 33 выступами 32 начнут перемещать втулки 17 и 25 вдоль оси промежуточного вала 18 в разные стороны до тех пор, пока шлицы 14 втулки 16 не войдут в шлицы 14 ступицы звездочки вала 9 гибкой ветви 2, а шлицы 30 втулки 25 не войдут в шлицы 14 звездочки вала 9 гибкой ветви 3, Б это время втулка 17 с помощью шарика 26 фиксируется в кольцевой канавке 20, а втулка 25 с помощью шарика 26 - в кольцевой проточке 23 (фиг.5).
Автооператор включает привод 8, при этом гибкие транспортирующие ветви 2,3 и секция 1 перемещаются, поштучно вьщавая изделия к месту назначения.
В варианте поштучной выдачи
12950666
тирующие ветви 2-4 перемещаются, по-. штучно выдавая изделия к месту назначения.
5 Форму
л а
изобрет ения
fO
Устройство для соединения рабочих органов с приводом, преимущественно секций установки для поштучной выдачи длинномерных изделий, содержащее размещенные на раме последовательно выходной вал привода, ведущие валы рабочих органов, установленные на концах ведзтцих валов втулки с выполненными на торцах шлицами, промежуточный вал с закрепленными на его концах втулками с выполненными на их торцах ответными пшицами, и узел включения ведущих валов рабочих ор- длинномерных изделий, габаритные раз- ганов, отличающееся тем.
15
меры которых превышают длину гибких транспортирующих ветвей 2-4 и секции 1, изделия поступают одним концом в ложементы секции 1 и на гибкие транспортирующие элементы 2-4, а фотоэлементы 44, установленные на опорах 5, дают команду автооператору на включение ветвей 2-4 и секции 1 в работу, при этом привод 8 отключается, а ры25
что, с целью снижения металлоемкости промежуточный вал установлен с возможностью фиксированного осевого перемещения, -узел включения содержит параллельно расположенные по разные стороны и на равном расстоянии от оси выходного вала привода штанги с выполненным на одном конце каждой из них фигурным продольным пазом с
чаг 38 находится в положении вклюуе- расширенной средней частью, связанния секции 1 и гибких транспортирую- щих ветвей 2 и 3, т.е. не выводится в вертикальное положение.
Автооператор поворачивает рычаг
40
38 вокруг своей оси в оси 39 качания, 35 закрепленный на раме с возможностью что фиксируется шариком 26 так, чтобы лыски 42 были перпендикулярны оси штанги 34, перекрывая фигурный паз 36, а лыски 43 свободно проходили в фигурном пазу 37 штанги 35 (фиг.9 и 10). Для передачи крутящего момента с вала 7 на транспортирующие ветви 2-4 автооператор дополнительно перемещает рычаг 38 в сторону ветви 3, при этом штанга 34 перемещается в корпусе 19 и вилкой 38 с выступом 32 перемещает втулку 25, пока ее шлищ 29 не входят в ответные шлицы 29 валика конца штанги 15, а втулка 25 фиксируется шариком 23 на промежуточном валу 18 в кольцевой канавке 24 (фиг.5 и 9). Устройство готово к работе.
45
качания в вертикальной плоскости и поворота вокруг своей продольной оси выполненный цилиндрическим с диаметром, равным ширине средней части фигурного паза, и с двумя парами лы- сок, параллельньпс внутри пары и перпендикулярных по отношению к лыскам другой пары и размещенных в упомянутых фигурных пазах на расстоянии друг от друга в каждой паре, равном ширине концевых участков паза, причем ось качания переключающего рычага расположена в плоскости оси выходного вала и перпендикулярно ей,
50 а шлицы втулки промежуточного вала, расположенной на его удаленном от привода конце, выполнены ступенчатыми с возможностью взаимодействия каждой из ступеней с ведущими валами
Автооператор включает привод 8, при этом секция 1 и гибкие транспорначения.
5 Форму
л а
изобрет ения
что, с целью снижения металлоемкости, промежуточный вал установлен с возможностью фиксированного осевого перемещения, -узел включения содержит параллельно расположенные по разные стороны и на равном расстоянии от оси выходного вала привода штанги с выполненным на одном конце каждой из них фигурным продольным пазом с
расширенной средней частью, связанные каждая с втулками упомянутого промежуточного вала, установленными с возможностью осевого фиксированного перемещения, переключающий рычаг.
40
35 закрепленный на раме с возможностью
45
качания в вертикальной плоскости и поворота вокруг своей продольной оси выполненный цилиндрическим с диаметром, равным ширине средней части фигурного паза, и с двумя парами лы- сок, параллельньпс внутри пары и перпендикулярных по отношению к лыскам другой пары и размещенных в упомянутых фигурных пазах на расстоянии друг от друга в каждой паре, равном ширине концевых участков паза, причем ось качания переключающего рычага расположена в плоскости оси выходного вала и перпендикулярно ей,
50 а шлицы втулки промежуточного вала, расположенной на его удаленном от привода конце, выполнены ступенчатыми с возможностью взаимодействия каждой из ступеней с ведущими валами
55 следующих за промежуточным валом рабочих органов.
J t
::zi
6ч
uuft
//
Фиг. / // rf Bui A
t 111 m r i4iti
)rrrr
Фиг. 2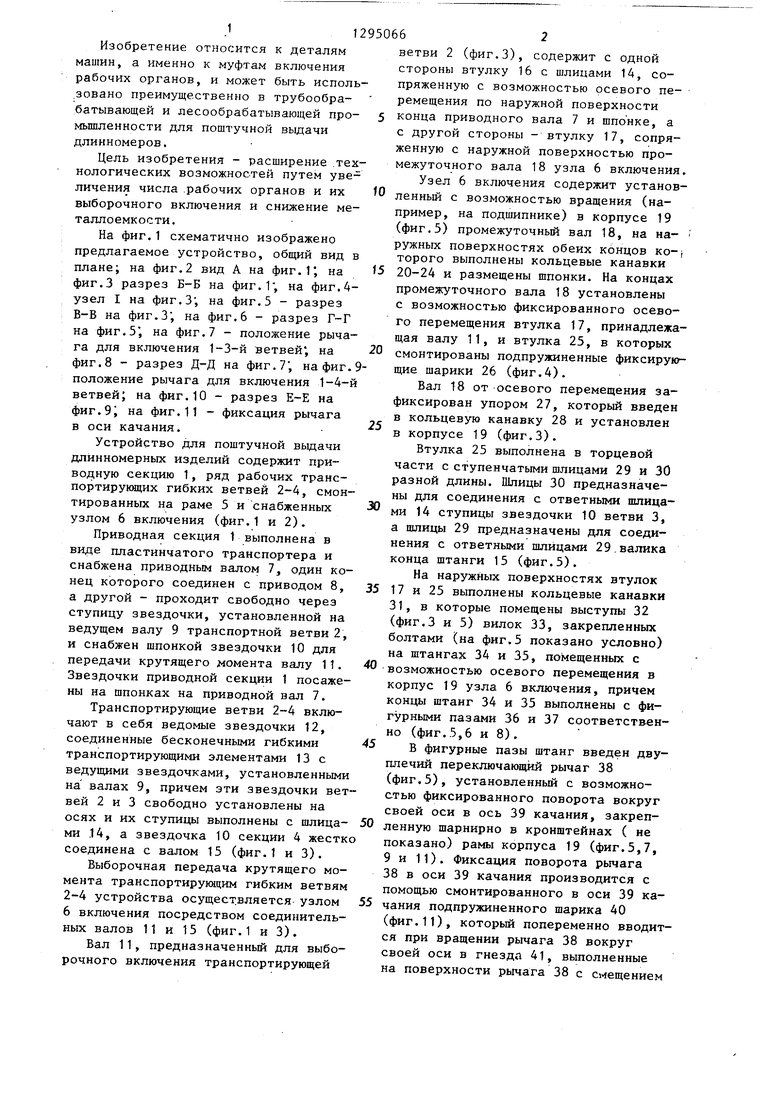
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки труб прямоугольного сечения | 1987 |
|
SU1484390A1 |
| Вертикальная конвейерная установка для транспортирования и накопления изделий | 1984 |
|
SU1369995A1 |
| Установка для нанесения покрытий | 1983 |
|
SU1142386A2 |
| РОЛЬГАНГ ДЛЯ ПРОДОЛЬНОГО ПЕРЕМ1ЕЩЕНИЯ И ВРАЩЕНИЯ ИЗДЕЛИЙ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1972 |
|
SU432055A1 |
| Установка для очистки наружной поверхности транспортного средства | 1988 |
|
SU1639999A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА С МУСКУЛЬНЫМ ПРИВОДОМ | 1992 |
|
RU2043241C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2004 |
|
RU2274767C1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
Изобретение относится к устрой- .ствам для соединения рабочих органов с приводом. Цель изобретения - снижение металлоемкости. Устройство содержит связанный с приводом и установленный с возможностью осевого перемещения промежуточный вал 18, на концах которого размещены втулки 17 и 25 с шлицами на торцах, для вклюei l eW J7.WA Я ti - -- Фиг. 5 чения рабочих органов содержащий штанги 34 и 35 с фигурными пазами 36 и 37. В фигурные пазы 36 и 37 штанг помещен двуплечий переключающий рычаг 38, установленный с возможностью фиксированного поворота вокруг своей продольной оси и с возможностью качания в вертикальной плоскости. На рычаге 38 выполнены две пары лысок, параллельных в каждой паре и перпендикулярных по отношению к лыскам другой пары. На торце втулки 25 шлицы выполнены ступенчатыми. Для передачи крутящего момента с выходного вала привода автооператор перемещает рычаг 38 в сторону рабочего органа, например ветви тягового органа, и его лыски 42 и 43, войдя в зацепление с фигурным пазом 37 штанги 35, начинают рычагом 38 перемещать втулку 17 относительно промежуточного вала 18 до тех пор, пока не произойдет зацепления с ведущим валом рабочего органа. Наличие ступенчатых шлицев на торце втулки 25 обеспечивает сцепление по крайней мере с двумя рабочими органами. 11 ил. 6-а с (Q л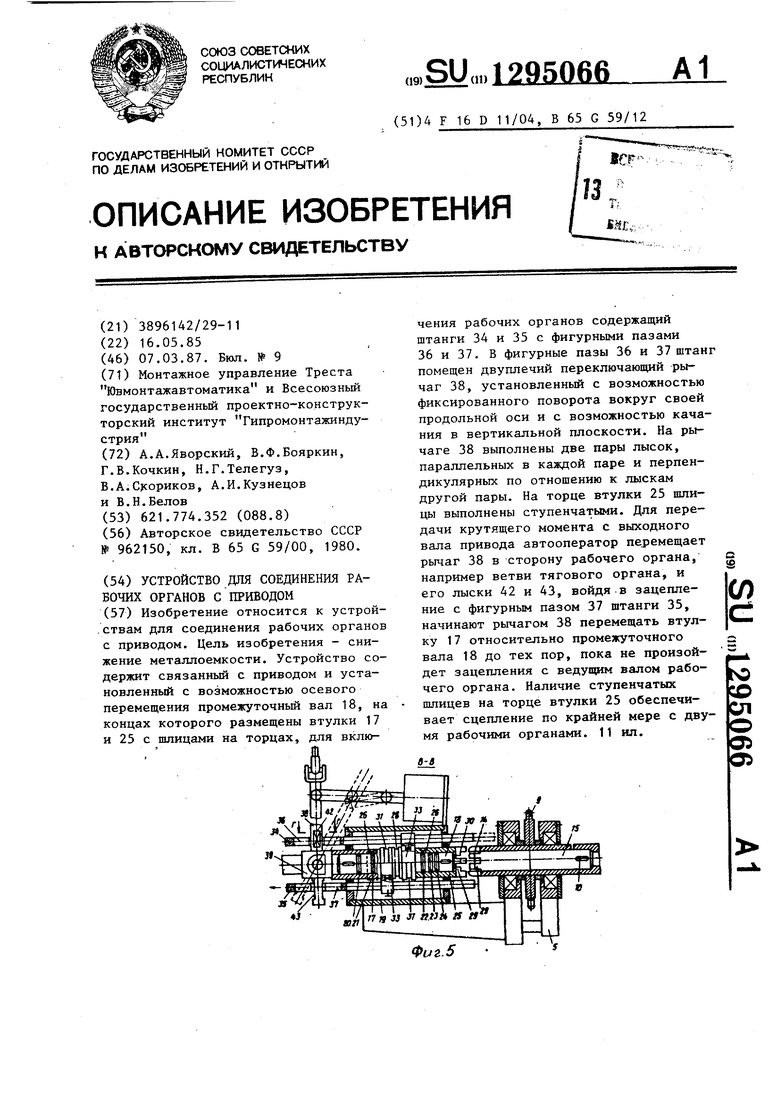
П IS
7II
LJ
7 to
/
tarn
№
Фиг.
фиг. 7
Д Л
/
J
Фиг. в
./i
i
Фиг. 9
Е- f
39
0
«/
//2. //
Редактор А.Петров
Составитель М.Персова
Техред Й.Попович Корректор М.Демчик
Заказ 600/39Тираж 812Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| Устройство для поштучной выдачи длинномерных изделий из пакетов | 1980 |
|
SU962150A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
