112
Изобретение относится к промышленному транспорту, в частности к автоматизации управления скоростью кра нов-ш абелеров, и может быть использовано для автоматизации погрузочно- разгрузочных транспортных и складских работ на предприятиях промышленности и сельского хозяйства.
Цель изобретения - упрощение устройства.
На чертеже приведена схема устройства.
Устройство содержит блок 1 выбора направления движения, цифроаналоговый преобразователь 2, блок 3 определения момента переклаочения скорости, блок 4 точного позиционирования, исполнительный механизм 5, реверсивный счетчик 6, первый 7 и второй 8 элементы И, блок 9 пуска, элемент ИЛИ 10, элемент НЕ 11, генератор 12 импульсов ,
Блок 3 определения момента переключения скорости содержит первый 13 и второй 14 дешифраторы, селектор- мультиплексор 15, триггер 16, второй 17, третий 18 элемента ИЛИ, второй элемент НЕ 19, четвертый элемент ИЛИ 20, третий элемент НЕ 21. Блок 9 пуска содержит кнопку 22 и резистор 23.
Устройство работает следующим об- р аз ом а
В статическом (исходном) состоянии на первые входы () блока 1 выбора направления движения сигналы кода заданной позиции не подаются. На вторые входы (BQ-B) подаются сигналь кода позиции, у которой находится транспортное средство. На выходе блока 1 выбора направления движения . сигнал Отсутствует, а на выходах А В, А В сигнал присутствует. Кнопка 22 блока 9 пуска замкнута и соответственно элементы И 7 и 8 заперты.
Реверсивный счетчик 6 находится в исходном состоянии. На 0-выходе дешифратора 13 присутствует нулевой сигнал, который держит в нулевом состоянии триггер 16. На вход цифро- аналогового преобразователя 2 подается код нуля. С его выхода на вход исполнительного механизма 5 подается сигнал О. Селектор-мультиплексор 15 по стробирующему входу может быть открыт или закрыт, в зависимости от абсолютной величины разности кодов А-В и сигнала, снимаемого с одного
5
0
5
01
5
0
5
0
5
0
22
из выходов второго дешифратора 14, к которому подключен вход элемента НЕ 1 9.
В зависимости от характеристик транспортного средства переключением выходов с одних на другие первого 13 и второго 14 дешифраторов устанавливаются максимальная скорость и расстояние (число разгрузочно-погрузоч- ных позиций), за которое требуется снижение скорости при приближении транспортного средства к заданной позиции. Выход первого дешифратора 13, к которому подключен вход элемента ИЛИ 18, должен быть идентичен выходу второго дешифратора 14, к которому подключен вход элемента НЕ 19.
При подаче на первые входы блока 1 выбора направления движения сигналов кода заданной разгрузочно- погрузочной позиции (конечной позиции движения транспортного средства), а на вторые входы В, -В блока 1 выбора направления движения сигналов кода исходной разгрузочно-погрузочной позиции, на выходах блока 1 появляется один из сигналов , , и .сигналы кода разности А-В (1-п). Если
на выходе блока 1 выбора направления движения будет сигнал, то первый 7 и второй В элементы И заперты нулевым сигналом с элемента НЕ 11.
Если сигнал будет на выходе А В или А В, то элементы И 7 и 8 подготовлены к срабатыванию. Сигнал на выходе А В условно означает разрешение движения влево (вверх) сигнал на выходе А В условно означает раз-, решение движения вправо (вниз).
При нажатии кнопки 22 блока 9 пуска первый 7 и второй 8 элементы И будут подготовлены к работе.
Если абсолютная разность кодов А-В больше числа (номера выходов ,дешифраторов 13 и 14), то импульсы с генератора 12 импульсов поступают через первый элемент И 7 на суммиру- ю ций вход реверсивного счетчика, с выхода которого сигналы кода подаются ка вход цифроаналогового преобразователя 2 и на вход первого дешифратора 13, который совместно с селектором-мультиплексором 15 составляет схему сравнения. На выходе цифроаналогового преобразователя 2 напряжение начинает расти, воздействуя на испол- нительньш механизм 5, увеличивая скорость движения: транспортного средства. С приходом дашульсов на суммирующий вход реверсивно1 о счетчика 6, на 2-выходе первого дешифратора 13 появляется сигнал нулевого уровня, который через второй элемент И.ПИ 18 взводит триггер 16, сигналом с которого закрывается первый элемент И 7. На суммирующий вход реверсивного счетчика импульсы поступать не будут. Код на его выходе соответствует наибольшей скорости движения транспортного средства.
При приближении к разгрузочно по- грузочной позиции на число ячеек, меньше числа Е, соответствующего выходу второго деишфратора 14, на рыхо- де четвертого элемента ИЛИ 20 появляется сигнал нулевого уровня, а на выходе третьего элемента НЕ 21 - сигнал единичного уровня. Второй элемент 20 да абсолютной разности кодов заданной
И 8 подготовлен для пропускания импульсов с блока 4 точного позиционирования, который выдает импульсы при прохождении транспортным средством калодой разгрузочно-погрузочной позиции .
Таким образом, при прохождении транспортным средством последующих разгрузочно-погрузочных позиций с выхода второго элемента И 8 будут пос- 30 16, выходные сигналы которого блокитупать ш-шульсы на вычитающий вход реверсивного счетчика 6. Цифровое значение кода на выходе реверсивного счетчика 6 начинает уменьшаться и соответственно начинает уменьшаться на- 35 зочной позиций с блока точного позипряжение на выходе цифроаналогового преобразователя 2, которое, воздействуя на исполнительный механизм, уменьшает скорость движения транспортного средства. При достижении транспортным средством заданной раз- грузочно-погрузочной позиции, с выхода блока 1 выбора направления движения сигнал, пройдя через элемент
НЕ 11, закрывает первый 7 и второй 8 45 разгрузочно-погрузочных позиций.
элементы И и импульсы через них с генератора 12 импульсов и блока 4 точного позиционирования не поступают на вход реверсивного счетчика. Транспортное средство останавливается. I
Если при пуске транспортного средства абсолютная разность кодов А-В меньше числа Е (номера выхода первого 13 и второго 14 дешифраторов), то селектор-мультиплексор 15 открыт нулевым потенциалом с четвертого элемента ИЛИ 20. Импульсы с выхода генератора 12 импульсов поступают через
первый элемент И 7 на суммирующий вход реверсивного счетчика 6.
Код с выхода реверсивного счетчика 6 будет поступать на входы цифроаналогового преобразователя 2 и на входы первого 13 дешифратора 13. Поскольку на первом дешифраторе 13 и селекторе-мультиплексоре 15 реализована схема сравнения, то код с реверсивно-го счетчика 6 сравнивается с кодом абсолютной разности кодов заданной и исходной разгрузочно-погрузоч- ных позиций А-В.
При поступлении импульсов на суммирующий вход реверсивного счетчика 6, на его выходах начинает увеличиваться численное значение выхрдного кода и скорость транспортного средства. При равенстве его с числом кои исходной разгрузочно-погрузочных позиций А-В, снимаемого с информационных выходов 1-т блока 1 выбора направления движения, который пода- ется на адресные шины селектора- мультиплексора 15, на инверсном выходе последнего появляется сигнал нулевого уровня, которым через третий элемент ИЛИ 18 взводится триггер
руют-первый элемент И 7 и подготавливают к работе второй элемент И В.
При прохождении транспортньм средством последующей разгрузочно-погруционирОвания поступает сигнал через второй элемент И В на вычитающий вход реверсивного счетчика 6.
Таким образом, скорость транспорт- ного средства, не достигнув максимальной, начинает снижаться. В этом случае наибольшая скорость определяется числом кода разности меяду числами кода заданной и исходной
Дальнейшее снижение скорости происходит аналогично.
Блок 4 точного позиционирования
может быть выполнен на элементе И на два входа, на которые подаются сигналы с датчиков точного позиционирования с зоной перекрытия (не показано) . Блок 1 выбора направления движения может быть выполнен на мик- росхеме ШЗ серии К155.
Использование предлагаемого устройства позволяет достичь значительного эффекТга за счет упрощения схемы,
улучшения технологичности изготовления (при изготовлении может быть применен в основном печатный монтаж и интегральные микросхемы), уменьшения затрат на обслулоивание во время эк- сплуатации и на ремонт.
Формула изобретения
1. Устройство для автоматического управления скоростью транспортного средства, содержащее блок выбора направления движения, цифроаналоговый преобразователь, блок определения момента переключения скорости, блок точного позиционирования и исполнительный механизм, отличающееся тем, что, с целью упрощения, устройства, в него введены реверсивный счетчик, два элемента И, блок пуска, элемент ИЛИ, элемент НЕ и генератор импульсов, причем выходы реверсивного счетчика подключены к входам -цифроаналогового преобразователя и первым входам блока определения момента перектаочения скорости, а суммирующий и вычитающий входы реверсивного счетчика соответственно подключены к выходам первого и второго элементов И, первьш вход первого элемента И подключен к первому выходу блока определен ш момента переключения скорости, второй вход г;ервого элемента И подключен к выходу блока пуска и первому входу второго элемен- та И, Третий вход первого элемента И подключен к выходу генератора х-импуль- сов, четвертый вход первого элемента И подключен к второму входу второго элемента И и выходу элемента НЕ, вход которого подкшочен к выходу равенства входных величин блока выбора направления движения, т информационных выходов которого подклаочень к вторым входам блока определения момента пе- реключения скорости, m-h информационных выходов блока выбора направления движения соединены с третьими входами блока определения момента переключения скорости, пятый вход .первого элемента И подключен к третьему входу второго элемента И и выходу элемента IffiH, входы которого подключены соответственно к выходам неравенства
BHHI-irni Заказ 779/50 Тираж 864 Подписное Произв.-полигр. , г. Ужгород, ул. Проектная, 4
входных величин блока выбора направления движения, четвертый вход второго элемента И подключен к выходу блока точного позиционирования, пятый вход второго элемента И подключен к второму выходу блока определения момента переключения скорости, шестой вход второго элемента И подключен к третьему выходу блока определения момента переключения скорости, выход цифроаналогового преобразователя подключен к входу исполнительного механизма, первые входы блока выбора направления движения являются входами кода заданной позиции, вторые входы являются входами кода исходной позиции.
2. Устройство по п.1, о т л и ч а- ю щ е е с я тем, что блок определения момента переключения скорости содержит первый и второй дешифраторы, селектор-мультиплексор, триггер, первый, второй и третий элементы ИЛИ, первый и второй элементы НЕ, причем Е-выход второго дешифратора подключен к входу первого элемента НЕ, выход которого подключег.; к одному из входов третьего элемента ИЛИ, второй вход которого подключен к выходу первого элемента ИЛИ, а выход подключен к стробирующему входу селектора-мультиплексора и входу второго элемента НЕ, а инверсный выход селектора-мультиплексора подключен к. одному из входов второго элемента ИЛИ, второй вход которого подключен к 8.-выходу первого дешифратора, а выход второго элемента ИШ подключен к S-входу триггера, R-вход которого подключен к 0-выходу первого дешифратора, входы первого дешифратора являются первыми входами блока, .выходы первого дешифратора/ подключены к первым входам селектора- мультиплексора, адресные входы которого соединены с входами второго дешифратора и являются вторыми входами блока, входы первого элемента ИЛИ являются третьийи входами блока, инверсный и единичный выходы триггера являются первым и вторым выходами блока соот)зетственно, а выход второго элемента НЕ является третьим выходом блока,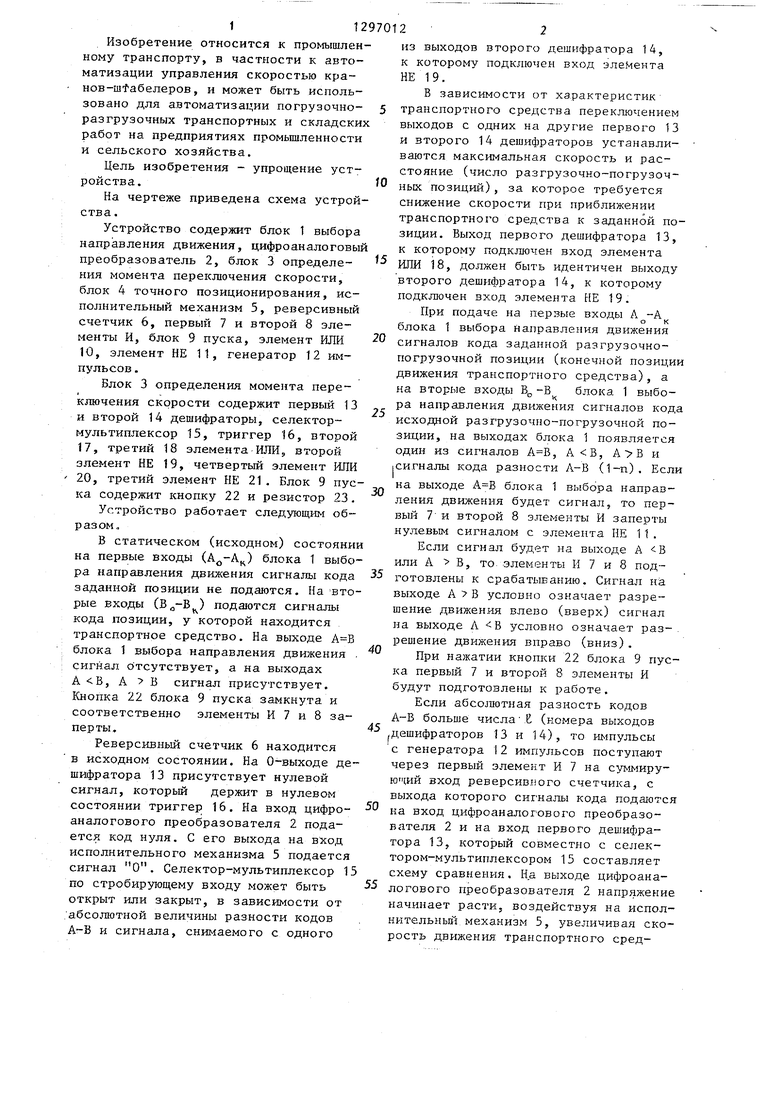


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования транспортного средства | 1984 |
|
SU1229778A1 |
| Устройство для поиска зон информации на магнитном носителе | 1990 |
|
SU1780107A1 |
| Устройство для автоматического адресования транспортных средств | 1987 |
|
SU1432560A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1247331A1 |
| Программное задающее устройство | 1986 |
|
SU1334107A1 |
| Устройство для поиска зон информации на магнитном носителе | 1989 |
|
SU1712961A1 |
| Устройство управления скоростью шахтной подъемной машины | 1978 |
|
SU745844A1 |
| Программируемый формирователь многочастотного сигнала | 1989 |
|
SU1739472A1 |
| Устройство для вероятностного моделирования работы транспортных систем | 1983 |
|
SU1170459A2 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
Изобретение относится к промышленному транспорту, в частности к .автоматизации управления скоростью кранов-штабелеров, и может быть использовано для автоматизации погру- зочно-разгрузочных работ на предприяrtlL тиях промьшленности и сельского хозяйства. Цель изобретения - упрощение схемы устройства. Устройство содержит блок 1 выбора направления движения, цифроаналоговый преобразователь 2, блок 3 определения момента перекл20- чения скорости, блок 4 точного позиционирования , В устройство введены реверсивный счетчик 6, первый 7 и второй 8 элементы И, блок 9 пуска, элемент ИЛИ 10, элемент НЕ 11 и генератор 12 импульсов. Причем блок 3 определения переключения скорости содержит первый 13 и второй 14 дешифраторы, селектор-мультиплексор 15, триггер 16, элементы ИЛИ 17, 18, 20, элементы НЕ 19 и 21. 1 з.п. ф-лы, 1 ил. с 5 С/) С -ч, СГ О ГО
| Устройство для управления транспортным механизмом | 1977 |
|
SU698865A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство автоматического управления скоростью транспортного средства | 1982 |
|
SU1117264A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
