рычаги 26 поворачиваются против часовой стрелки, нижний конец рычага 22 перемещается вправо, увлекая тягу 18 и коромысла, передавая усилия на коленчатые рычаги 6. Резиновые накладки планок, закрепленных на рыча1
Изобретение относится к приспособлениям для подъема и транспортировки грузов вильчатым захватом и может быть использовано в промышленности строительных материалов, а именно для садки кирпича в кольцевые печи и его выгрузки, а также в керамической и других отраслях промышленности.
Цель изобретения - упрощение конструкции и повышение надежности путем обеспечения равного усилия зажима всех опорных кирпичей.
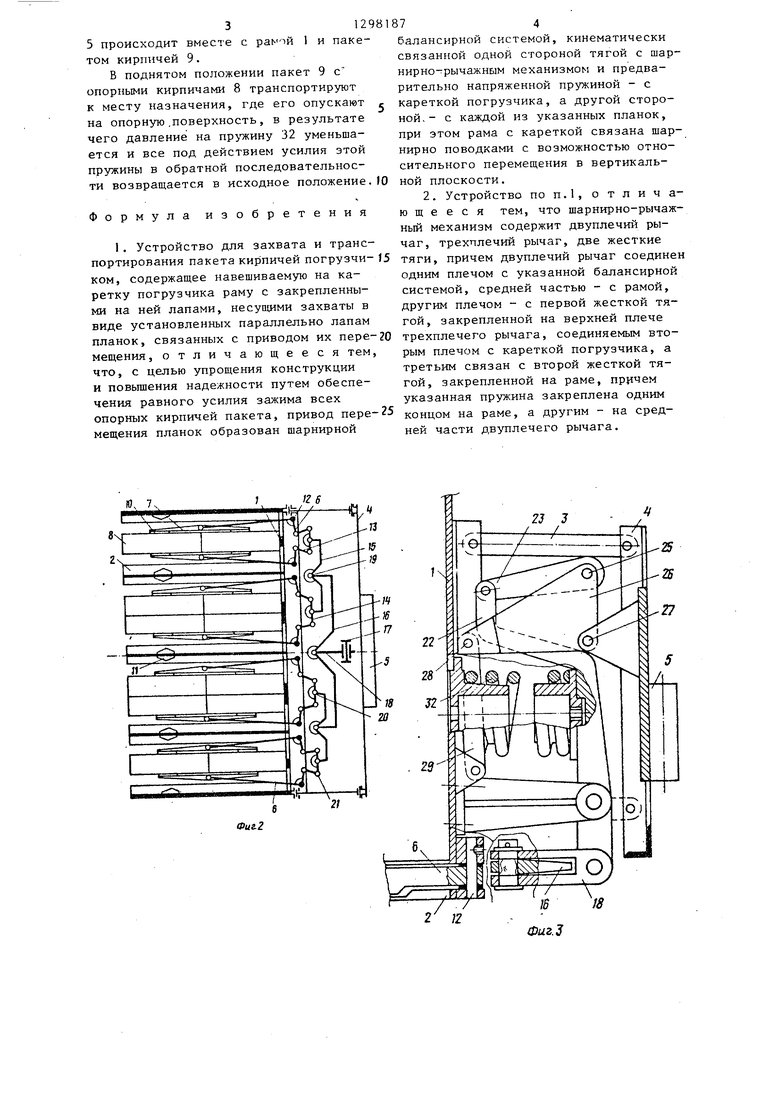
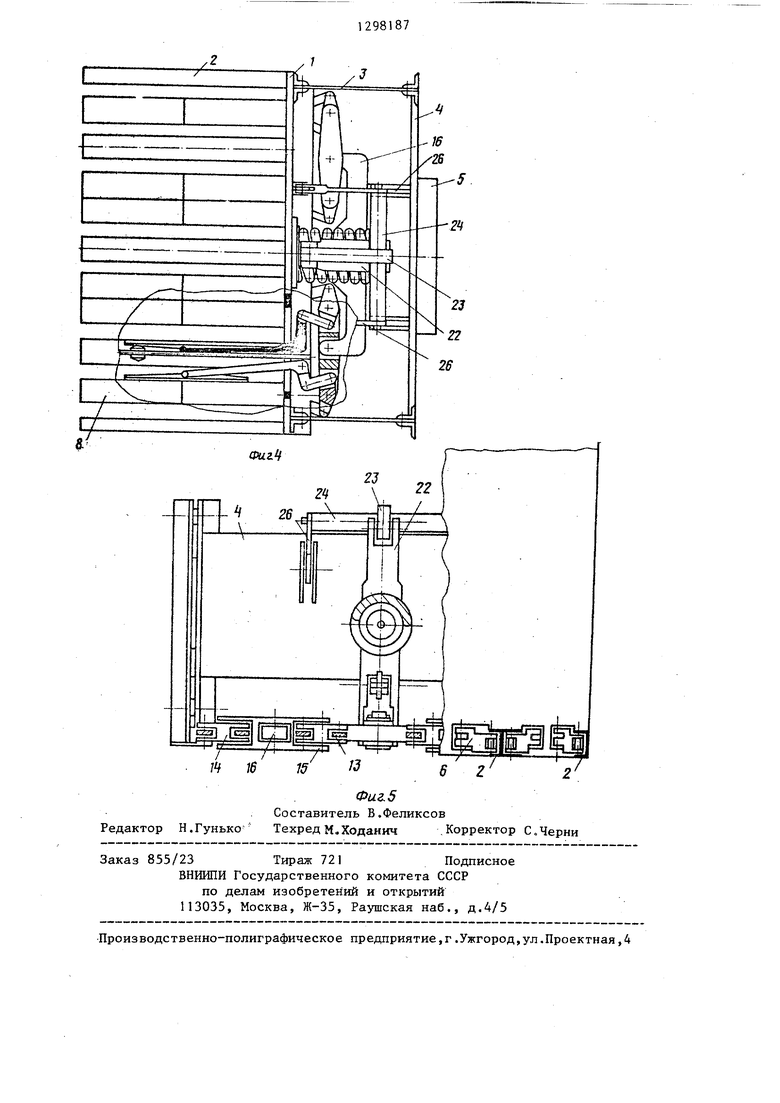
На фиг.1 изображена кинематическая схема предлагаемого устройства, вид сбоку; на фиг.2 - то же, вид сверху; на фиг.З - рычажной механизм вид сбоку; на фиг.4 - то же, вид сверху; на фиг.З - то же, вид спереди
Устройство содержит передвижную в вертикальной плоскости раму 1 с жестко прикрепленными к ней лапами 2, шар нирно связанную четырьмя параллельными поводками 3 с балкой 4, прикрепленной к каретке 5. Параллельно лапам на коленчатых рычагах 6 шарнирно установлены планки 7 захватов опорных кирпичей 8 вместе с пакетом 9, имеющие на концах резиновые накладки 10. На лапах 2 установлены ограничители 11 для фиксации планок 7 в исходном положении. Коленчатые рычаги 6 посредством осей 12 шарнирно связаны с рамой 1 и через тяги 13 - с шарнирной балансирной системой, состоящей из коромысел 14 - 16. Коромысло 16 выполнено в виде двуплечего рычага, середина которого связана осью 17 шарнира с дополнительной тягой 18, а концы - осями 19 шарнирно с серединами двух коромысел 15, также выполненных в виде двуплечих рычагов, концы каждого из которых в свою очередь шарнирами 20 связаны с серединами двух коромысел 14. Концы последних шарнирами 21 связаны с тягами 13.
гах 6, входят в контакт с опорными кирпичами и надежно зажимают последние. Дальнейший подъем каретки 5 происходит вместе с рамой 1. В поднятом положении пакет 9 транспортируется к месту назначения. 1 з.п. ф-лы, 5 ил.
0
5
0
5
0
5
0
5
Упомянутое коромысло 16 с другой сто- роны посредством тяги 18 и шарнирно- рычажного механизма, включающего двуплечий рычаг 22, связанный с первой жесткой тягой 23, связанной через ось 24 и шарниры 25 с двумя параллельно расположенными трехплечими рычагами 26, прикрепленными шарнирами 27 к балке 4 и связанными через шарниры
28,вторую жесткую тягу 29 и шарниры 30 с рамой 1. Двуплечий рычаг 22 связан с рамой шарниром 31 и пружиной 32 предварительно сжатой на усилие, удерживающее через тягу 23, трехпле- чий рычаг 26 и вторую жесткую тягу
29,раму 1 в .поднятом положении относительно каретки 5 погрузчика.
Устройство работает следующим образом.
Перемещением погрузчика лапы 2 вводят в каналы пакета 9, образованные двумя нижними рядами опорных кирпичей 8. При подъеме каретки 5 погрузчика лапы 2 принимают нагрузку пакета кирпичей 9, при этом сила предварительного сжатия пружины 32 преодолевается, каретка 5 поднимается относительно рамы 1, рычаги 22 и трех- плечие рычаги 26 поворачиваются против часовой стрелки. В результате этого при дополнительном сжатии пружины 32 нижний конец двуплечего рычага 22 перемещается вправо, увлекая за собой тягу 18 и коромысла 16, 15, 14, передавая усилия через тяги 13 на коленчатые рычаги 6. Последние, поворачиваясь вокруг осей 12, вводят в контакт резиновые накладки 10 планок 7 захвата с опорными кирпичами 8 и надежно зажимают последние, а нижний конец двуплечего рычага 22 занимает крайнее правое положение, чем ограничивается вертикальное перемещение рамы I относительно каретки 5, после чего дальнейший подъем каретки
312
5 происходит вместе с рамой 1 и пакетом кирпичей 9.
В поднятом положении пакет 9 с опорпыми кирпичами 8 транспортируют к месту назначения, где его опускают на опорную .поверхность, в результате чего давление на пр ткину 32 уменьшается и все под действием усилия этой пружины в обратной последовательности возвращается в исходное положение
Формула изобретения
1. Устройство для захвата и транспортирования пакета кирпичей погрузчи- ком, содержащее навешиваемую на каретку погрузчика раму с закрепленными на ней лапами, несуп1ими захваты в виде установленных параллельно лапам планок, связанных с приводом их пере мещения, отличающееся тем что, с целью упрощения конструкции и повьппения надежности путем обеспечения равного усилия зажима всех опорных кирпичей пакета, привод пере мещения планок образован шарнирной
874
балансирной системой, кинематически связанной одной стороной тягой с шар- нирно-рычажным механизмом и предварительно напряженной пружиной - с кареткой погрузчика, а другой стороной,- с каждой из указанных планок, при этом рама с кареткой связана шар- нирно поводками с возможностью относительного перемещения в вертикальной плоскости.
2. Устройство по п.1, о т л и ч а- ю щ е е с я тем, что шарнирно-рычаж- ный механизм содержит двуплечий рычаг, трехплечий рычаг, две жесткие тяги, причем двуплечий рычаг соединен одним плечом с указанной балансирной системой, средней частью - с рамой, другим плечом - с первой жесткой тягой, закрепленной на верхней плече трехплечего рычага, соединяемым вторым плечом с кареткой погрузчика, а третьим связан с второй жесткой тягой, закрепленной на раме, причем указанная пружина закреплена одним концом на раме, а другим - на средней части двуплечего рычага.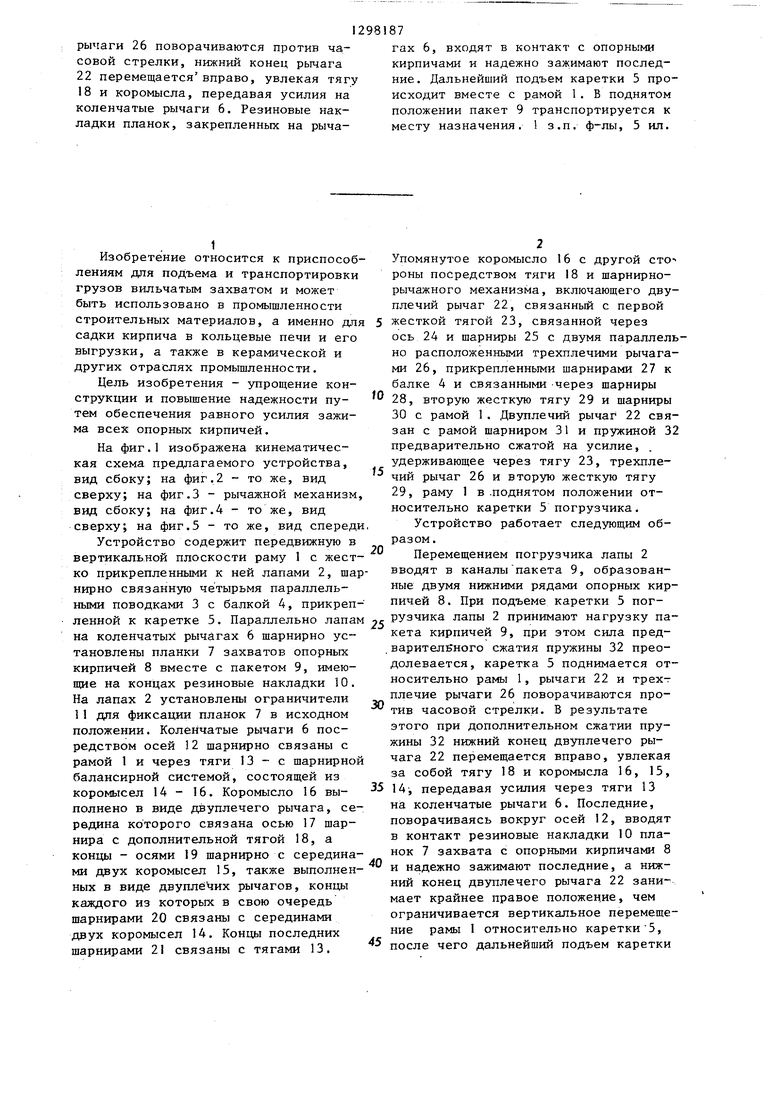
| название | год | авторы | номер документа |
|---|---|---|---|
| Прицепной пресс высокого давления к пресс-подборщикам льна низкого давления | 1981 |
|
SU990119A2 |
| Универсальная тележка для транспортировки жаток | 2019 |
|
RU2726437C1 |
| Механический групповой захват | 1984 |
|
SU1207777A1 |
| Захватное устройство для подъема и транспортирования бесподдонных пакетов кирпича | 1991 |
|
SU1789489A1 |
| Устройство для захвата и транспортирования пакета кирпичей | 1973 |
|
SU515719A1 |
| Коммутационное устройство | 1979 |
|
SU849348A1 |
| Устройство для подачи и отбраковки упакованных предметов | 1987 |
|
SU1502421A1 |
| Захватное устройство для пакетированных грузов | 1984 |
|
SU1229163A1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| Автомат для садки кирпича на печные вагонетки | 1987 |
|
SU1412974A1 |
Изобретение может быть использовано для садки кирпича в кольцевые печи и его выгрузки. Цель изобретения - упрощение конструкции и повышение надежности. Устройство содержит навешенную на каретку 5 погрузчика с возможностью относительного перемещения раму 1 с лапами 2, имеющими захг; ваты в виде планок. Последние посредством шарнирной балансирной системы, состоящей из коромысел и тяги 18, кинематически связаны через шар- нирно-рычажный механизм с кареткой 5. Рычажный механизм состоит из двуплечего рычага 22, первой жесткой тяги 23, связанной с двумя параллельно расположенными трехплечими рычагами 26, которые посредством шарниров 28, второй жесткой тяги 29 и шарнира 30 связаны с рамой 1. Рычаг 22 связан с рамой 1 шарниром 31 и предварительно сжатой пружиной 32. Лапы 2 вводят в каналы пакета 9. При подъеме каретки 5 силасжатия пружины 32 преодолевается, каретка 5 поднимается относительно рамы 1, рычаг 22 и трехплечие (Л . в Ifuji
8
15
Фиг.5
Составитель В.Феликсов Редактор Н.Гунько ТехредМ.Ходаиич .Корректор С.Черни
J-J,-I-rlll-l-rTI--T- --11 J ----- -..-.
Заказ 855/23 Тираж 721Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
