Изобретение относится к грузоподъемным устройствам.
Цель изобретения - улучшение надежности и автоматического регулирования нодъемной силы в зависимости от изменяющейся внешней нагрузки.
На чертеже изображена кинематическая схема домкрата.
Домкрат содерж.ит корпус силового цилиндра 1 со штоком 2, конец которого шарнирно соединен с оцорой 3, На штоке 2 укреплена гайка 4, взаимодействующая с самотормозящимся винтом 5, который через редуктор б связан с валом 7, установленным на подшипнике 8 в корпусе 9. В
нает затормаживаться, электродвигатель 15 через муфту 14 и вал 11 закручивает торсионный вал 10, кулачок 12 своей винтовой поверхностью перемещает кулачок 16, сжи, мая пружину 18, по шлицам вала 7. Фланец 17 перемещается влево, следом за ним под воздействием пружины .22 перемещаются ролик 19 с золотником 20 распределителя 21. Линия 23 сообщается с линией 25, и воздух под давлением поступает в силовой
цилиндр 1. Жесткость торсионного вала 10, параметры винтовых поверхностей кулачков 12, 16 и золотника 20 подбираются таким образом, чтобы расход и давление подаваемого в корпус силового цилиндра 1
вале 7 закреплен торсионный вал 10, вто- 15 воздуха соответствовали приложенной к
штоку 2 внещней нагрузке.
рои конец которого закреплен на вале 11, с кулачком 12, установленным в подщип- никах 13. Вал 11 через муфту 14 связан с нриводом вращения, например электродвигателем 15. На вале 7 посредством шлице- вого соединепия установлен кулачок 16 с фланцем 17. Кулачки 12 и 16 имеют винтовые поверхности, которые взаимодействуют под действием усилия пружины 18 сжатия, установленной на вале 7. Фланец 17
20
штоку 2 внещней нагрузке.
При повышении давления рабочей среды в корпусе силового цилиндра 1 винт 5 разгружается, уменьщается момент, скручивающий торсионный вал 10, угол закрутки его уменьщается, кулачки 12 и 16 сближаются под действием нружины 18, и золотник 20 под воздействием фланца 17 частично перекрывает линию 23. При дальнейщем перемещении щтока 2 в зависимости от
контактирует с роликом 19, закрепленным 25 возникающей нагрузки золотник 20 перена золотнике 20 3-линейного двухпозицион- ного распределителя 21 рабочей среды. Ролик 19 поджимается к фланцу усилием пружины 22. Распределитель рабочей среды, например воздуха, под высоким давлением имеет три линии: 23 - подвод давления; 24 - атмосфера; 25 - подвод к силовому цилиндру. В случае необходимости плунжерный силовой цилиндр может быть заменен двусторонним. В этом случае может быть применен 4-линейный трехпози- ционный распределитель, соединенный с норшневой и щтоковой полостями силового цилиндра 1. Упругость торсионного вала 10 выбирают таким образом, чтобы усилие максимального угла закручивания прё- выщало силы внутреннего сопротивления непагруженного механизма, а мощность электродвигателя 15 обеспечивала возможность закрутки торсионного вала на максимально допустимый угол и подъем вхолостую щтока 2 с опорой 3. В редуктор 6 вмонтирован тормоз 26, включающийся при отключении двигателя 15.
Домкрат работает следующим образом.
В исходном состоянии опора 3 находится над гру}1то.м, электродвигатель 15 отклюкрывает или открывает линию 23, отслеживая перемещение штока 2 и обеспечивая вращение винта 5 в разгруженном состоянии. При необходимости остановки домкрата электродвигатель 15 отключают, тормоз
30 26 останавливает винт 5, торсионный вал 10, раскручиваясь, возвращает систему в исходное положение, запирая золотником 20 линию 23.
При опускании транспортного средства электродвигатель 15 включают в противо положном направлении, тормоз 26 растормаживает винт 5, и шток 2 под действием веса транспортного средства начинает вдвигаться в корпус силового цилиндра 1, сжимая находящуюся в нем рабочую среду.
40 При этом усилие сопротивления на винте 5 возрастает, и в соответствии с указанным процессом происходит закручивание торсионного вала 10, только в другую сторону, золотник 20 смещается вправо, линия 25 соединяется с линией 24, т. е. корпус силового цилиндра 1 сообщается с атмосферой. В дальнейшем движение осуществляется с подпором рабочей среды, пропорциональным возникающей нагрузке в следящем режиме. При отрыве опоры 3 от грунта вес
45
чен,, золотник 20 перекрывает линию 23 50 транспортного средства перестает способподвода Давления, винт 5 заторможен тормозом 26. При включении электродвигателя 15 тормоз 26 растормаживает винт 5, который через гайку 4 начинает выдвигать щток 2 из корпуса силового цилиндра 1 до
ствовать вдвижению щтока 2 в корпус силового цилиндра 1, нагрузка на винт 5 становится близкой к максимальной, и происходит полное открытие золотника 20, сообщающего полость в корпусе силового цилиндсоприкосновения опоры 3 с грунтом. При 55 ра 1 с атмосферой. Подъем опоры 3 про- этом сопротивление вращению винту 5 уве-исходит за счет усилия, развиваемого элекличивается, вал 7 через редуктор 6 начи-тродвигателем 15.
нает затормаживаться, электродвигатель 15 через муфту 14 и вал 11 закручивает торсионный вал 10, кулачок 12 своей винтовой поверхностью перемещает кулачок 16, сжимая пружину 18, по шлицам вала 7. Фланец 17 перемещается влево, следом за ним под воздействием пружины .22 перемещаются ролик 19 с золотником 20 распределителя 21. Линия 23 сообщается с линией 25, и воздух под давлением поступает в силовой
цилиндр 1. Жесткость торсионного вала 10, параметры винтовых поверхностей кулачков 12, 16 и золотника 20 подбираются таким образом, чтобы расход и давление подаваемого в корпус силового цилиндра 1
воздуха соответствовали приложенной к
штоку 2 внещней нагрузке.
При повышении давления рабочей среды в корпусе силового цилиндра 1 винт 5 разгружается, уменьщается момент, скручивающий торсионный вал 10, угол закрутки его уменьщается, кулачки 12 и 16 сближаются под действием нружины 18, и золотник 20 под воздействием фланца 17 частично перекрывает линию 23. При дальнейщем перемещении щтока 2 в зависимости от
возникающей нагрузки золотник 20 перекрывает или открывает линию 23, отслеживая перемещение штока 2 и обеспечивая вращение винта 5 в разгруженном состоянии. При необходимости остановки домкрата электродвигатель 15 отключают, тормоз
26 останавливает винт 5, торсионный вал 10, раскручиваясь, возвращает систему в исходное положение, запирая золотником 20 линию 23.
При опускании транспортного средства электродвигатель 15 включают в противоположном направлении, тормоз 26 растормаживает винт 5, и шток 2 под действием веса транспортного средства начинает вдвигаться в корпус силового цилиндра 1, сжимая находящуюся в нем рабочую среду.
При этом усилие сопротивления на винте 5 возрастает, и в соответствии с указанным процессом происходит закручивание торсионного вала 10, только в другую сторону, золотник 20 смещается вправо, линия 25 соединяется с линией 24, т. е. корпус силового цилиндра 1 сообщается с атмосферой. В дальнейшем движение осуществляется с подпором рабочей среды, пропорциональным возникающей нагрузке в следящем режиме. При отрыве опоры 3 от грунта вес
транспортного средства перестает способствовать вдвижению щтока 2 в корпус силового цилиндра 1, нагрузка на винт 5 становится близкой к максимальной, и происходит полное открытие золотника 20, сообщающего полость в корпусе силового цилинд ра 1 с атмосферой. Подъем опоры 3 про- исходит за счет усилия, развиваемого элекФормула изобретения
Домкрат, содержащий корпус, смонтированные на нем силовой цилиндр, на штоке которого закреплена гайка, зацепленная со смонтированным в цилиндре винтом, образуя с ним самотормозящуюся винтовую нару, привод винта, отличающийся тем, что, с целью улучшения надежности и автоматического регулирования подъемной силы в зависимости от изменяющейся внеш ней нагрузки, он снабжен смонтированным в корпусе соосно друг другу торсионным валом и двумя кулачками с винтовыми поверхностями на взаимодействующих друг с дру
10
гом торцах, причем привод вращения винта связан с одним концом торсионного вала и одним кулачком, а винт - с другим концом торсионного вала и - направляющими - с другим кулачком для его осевого перемещения, трехлинейным двухпозицион- ным распределителем рабочей среды с механическим управлением от другого кулачка, причем первая линия этого распределителя сообщена с источником давления рабочей среды, вторая - со сливом, а третья - с силовым цилиндром, для сообщения в первой позиции первой линии с третьей, а во второй позиции третьей линии с второй.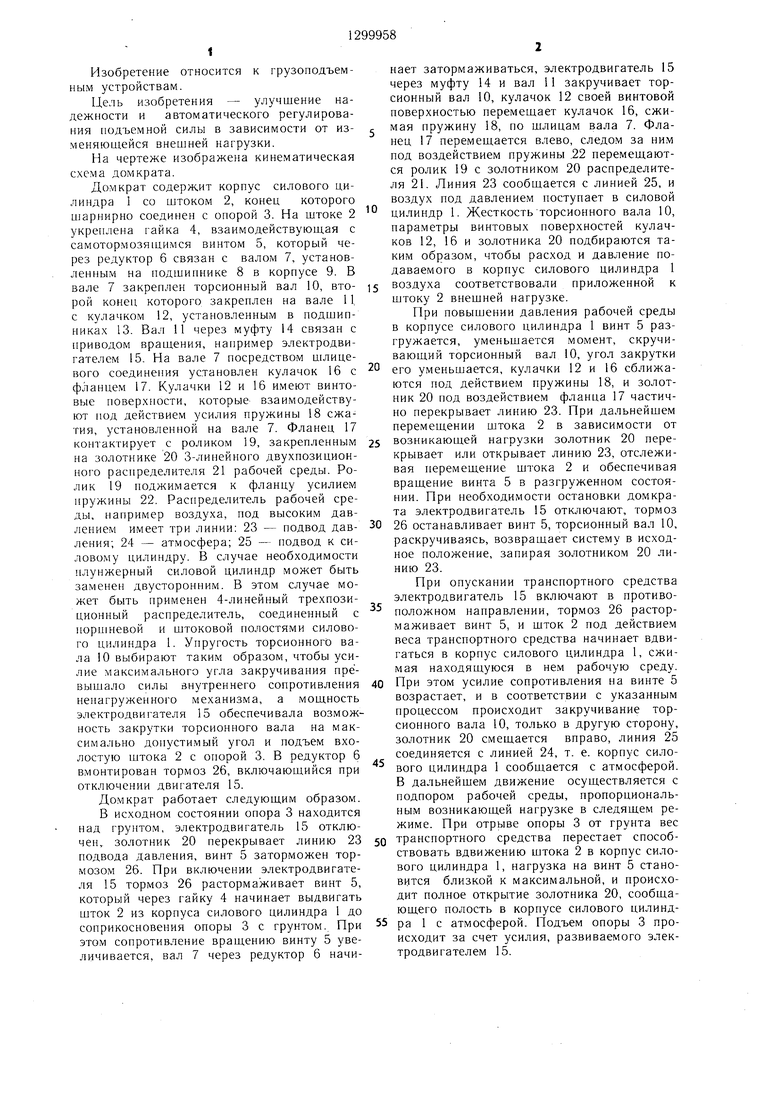
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| Гидравлический домкрат | 1981 |
|
SU1098905A1 |
| ИНТЕГРАЛЬНЫЙ РУЛЕВОЙ МЕХАНИЗМ | 2000 |
|
RU2248901C2 |
| УСТРОЙСТВО для НИЖНЕГО ГЕРМЕТИЗИРОВАННОгЬ f^O'^'CC^iO'JHTT" НАЛИВА ЦИСТЕРН|''-ЛГ.'.'...I ••;-• *'--1-'.!:;п,:: S.^i! | 1971 |
|
SU291816A1 |
| Стенд для испытаний силовых механизмов | 1972 |
|
SU498528A1 |
| Гидравлическое следящее устройство для управления грузоподъемным краном | 1969 |
|
SU438603A1 |
| Силовой цилиндр | 1982 |
|
SU1110949A1 |
| Карбюраторный двигатель внутреннего сгорания | 1984 |
|
SU1281703A1 |
| Гидравлический домкрат | 1976 |
|
SU1074813A1 |
| Ленточно-щлифовальный станок для обработки лопаток газотурбинных двигателей | 1977 |
|
SU865624A2 |
Изобретение относится к грузонодъем- ным средствам и может быть использовано, преимущественно, в качестве домкрата для вывешивания транспортных средств при работе с переменной нагрузкой. Цель изобретения - улучшение надежности. При выдвижении штока 2 цилиндра 1 враш,ение от электродвигателя .через вал II, торсионный вал 10, вал 7, редуктор 6 передается на самотормозящийся винт 5, взаимодействующий с гайкой 4, закрепленной на щто- ке 2. При возникновении дополнительных усилий на штоке 2 торсионный вал 10 начинает закручиваться пропорционально приложенной нагрузке, при этом в результате взаимодействия винтовых поверхностей кулачков 12 и 16 кулачок 16 смешается в осевом направлении, а за ним перемещается золотник 20 распределителя 21, сообщая полость силового цилиндра 1 с давлением рабочей среды или атмосферой в зависимости от направления приложенной внешней нагрузки. Таким образом обеспечиваетс я разгрузка винта 5, что позволяет снизить мощность электродвигателя 15 и обеспечить автоматическое регулирование подъемной силы в зависимости от изменяющейся внещ- ней нагрузки. 1 ил. сл 26 /5 1чЭ со () сл ОС /7/ /// /// /// xJf ////// /// Л
| Гидроцилиндр | 1981 |
|
SU987220A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
