Изобретение относится к машиностроению и может быть использовано для струйной обработки (очистки, нанесения покрытий) внутренних поверхностей полых изделий типа тел вращения.
Цель изобретения - повып)е11ие точности позиционирования исполнительного органа за счет улучшения динамических характеристик механизма его переменления.
На чертеже показана кинематическая схема манипулятора.
Манипулятор содержит тележку 1, на которой установлена стойка 2, несущая полую 11 тангу 3 с механизмом перемешения исполнительного органа, который выполнен в виде двух и1арнирно-рычажных параллелограммов 4, расположенных симметрично относительно оси штанги 3, имеющих обн1ий Hiapi np Г), расноложеиный на этой оси, а Taioi c по одному шарниру 6 и 7, соответ- cTiicuHo расположенному на звене другого пара. ыелограмма.
На койне ведомого звена 8 каждого па- ра.;1лелог()ам ма размен1ен исполнительный орган 9.
Манипулятор имеет привод врапхения нтанги 3, содержащий двигатель 10 н цилиндрическую зубчатую передачу с колесами 1 и 12, н привод механизма нереме- lUCHiiH исполнительного органа, состоящий и.ч днигате.ая 13 и нередачи винт - гайка, причем выходной вал двигателя 13 жестко связан с сайкой 14 передачи, а винт 15 этой нсредачн связан через нодп1инникоБый узел 16 и тяги 17 00 звеньями 8 параллелограммов.
Обрабатываемое изделие 18 расположено в зоне действия исполнительного органа.
. 1ято ) работает следуюпшм образом.
С номошыо тележки 1 заводят Н1тангу 3 с исполнительным органом в полость об- рабатьп аемого изделия 18. Затем включают двигате.. И) 10, который через зубчатые колеса 1 и 12 вращает Н1тангу 3. Одновременно с двигате.пем 10 включают двигатель 13, который с 11омон1ью винтовой нары че- pi-:i тяги приводит в движе1Н1е механизм не
5
0
5
0
5
0
ремещения исполнительного органа 9, который совершает перемещение параллельно образующей днища изделия 18 по спирали Архимеда.
После обработки днища электродвигатель 13. выключают и начинают переменить тележку 1, при этом исполнительный орган продолжает вран1аться вместе со н,1тангой 3 и осуществляет обход обечайки изделия по винтовой спирали. Заднее днин1е обрабатывают таким же образом, как и переднее.
После обработки за.млего днин1а осуществляют реверс двигателя 13 и возвранхают исполнительный механизм в исходное состояние, после чего выводят н тангу 3 из нолости обрабатываемого изделия.
Формула изобретения
Манипулятор для струйно обработки внутрен11их новорхностей изделий, боковые стенки и днин1,е которых яв.чяюгся гелами врап1ения, содержа in и ii тележку со стойкой, на которой с возмо.)1о вран1ония 1И), 1 своей оси смонтирована полая 1нтанга с с- тановленн ым на ее конце механизмом перемещения исполнительно1-о органа и нривод, отличающийся тем, что, с це;1ью повыше 1ИЯ точности позиционирования HC110;i;ll тельного органа за счет улуч1нения динам - ческих характеристик механизма ei o rienc- мен1ения, указанньпн механизм выно.лнс в виде двух 1нар11ирно-рычажьпз1х наралле/ю- граммов, расноложепных симметрично относительно оси пггангн п имеюп1их общ1;й niap- нир на этой оси, а также по одному н арниру, соот1 етственно расноложенному на нов))от- ном звене другогс) нарал:1елограмма, и дополнительного привода, cocTOHiH.ei o из /uui- гате., 1я и передачи випт 1 айка, причем дви1 атель закреплен на стойке и его выхо.ч- ной вал жестко связан с -айкой указанной нередачи, а випт этой передачи размещен внутри Н1тан1 и и шарнирно связан через дополните.льно введенные нод1нннников1мй узел и тяги со звеньями указанн 1Х lafia.i- .пелограммов.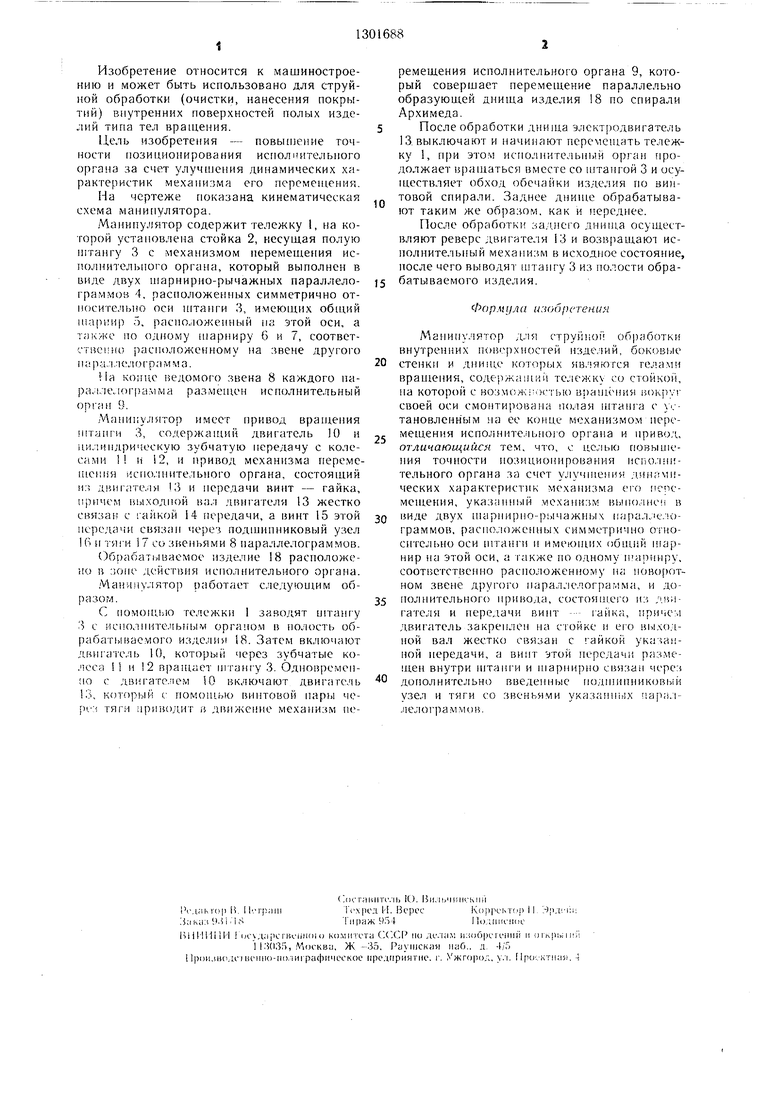
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический привод с объемным регулированием координаты | 1980 |
|
SU921769A1 |
| Оборотный плуг | 1987 |
|
SU1517770A1 |
| Механизм фиксации положения захватных органов грузозахватного устройства | 1986 |
|
SU1379222A1 |
| Регистрирующее устройство | 1978 |
|
SU744233A1 |
| Устройство для демонтажа болтовых соединений | 1986 |
|
SU1348159A1 |
| Волоконный эндоскоп | 1983 |
|
SU1148607A1 |
| Шаговый конвейер | 1980 |
|
SU899415A1 |
| Траверса | 1985 |
|
SU1252284A1 |
| Рабочий орган культиватора | 1984 |
|
SU1412610A1 |
| Установка для стерилизации медицинского инструмента | 1975 |
|
SU597369A1 |
М.чпбре геиио относится к оГ). .ма- п1И11()сТ()ооиия и .можсч быть испо;1Ь;и)нан() л, струйной ск )рабогки - очистка, иаиесоииг :1()крытии iiiiyi i /ciniiix iioiu-pxiiocTc:: lio.iibiA и.до.тий Ttiiia тс, в|)апк 1П1Я. iU .ii. изобретенияповышенно точное 1 И llO.illUHi ,ания Н1-.Ч(.. 1))ган:1. .ЛАанпич .)ято содер/1 п i i e. 1, на isoropon ус ..1ена стойка 2, несун1ая по.чую у с механизмо.м перемещения нспо.1ните.-1ьно ;. органа ;.. причем указаин1 и | мехлни; .м иь;- Ho.Mieii :i iii. i.e ;i.i)yx (;ио-;м, на pa.i.ii.Moi 4. i К11а1цс ния н танг:: осу|цеств. ;ется oi лни а. re. isi l) чере.% iii: .мннлрнческую зубчатую передачу 11 2. а п|)ивод не)емен11Ч11:я нсно.тниге. п.но и o;v гана 9 ocyiuecTii.inei cs. от .;вигате.. 1Я l. i чсрс., не1чмам НИН i; ii тяги i 7. 1 ., п 1 г :.-. pSss.;.. 15 . -ОГ . .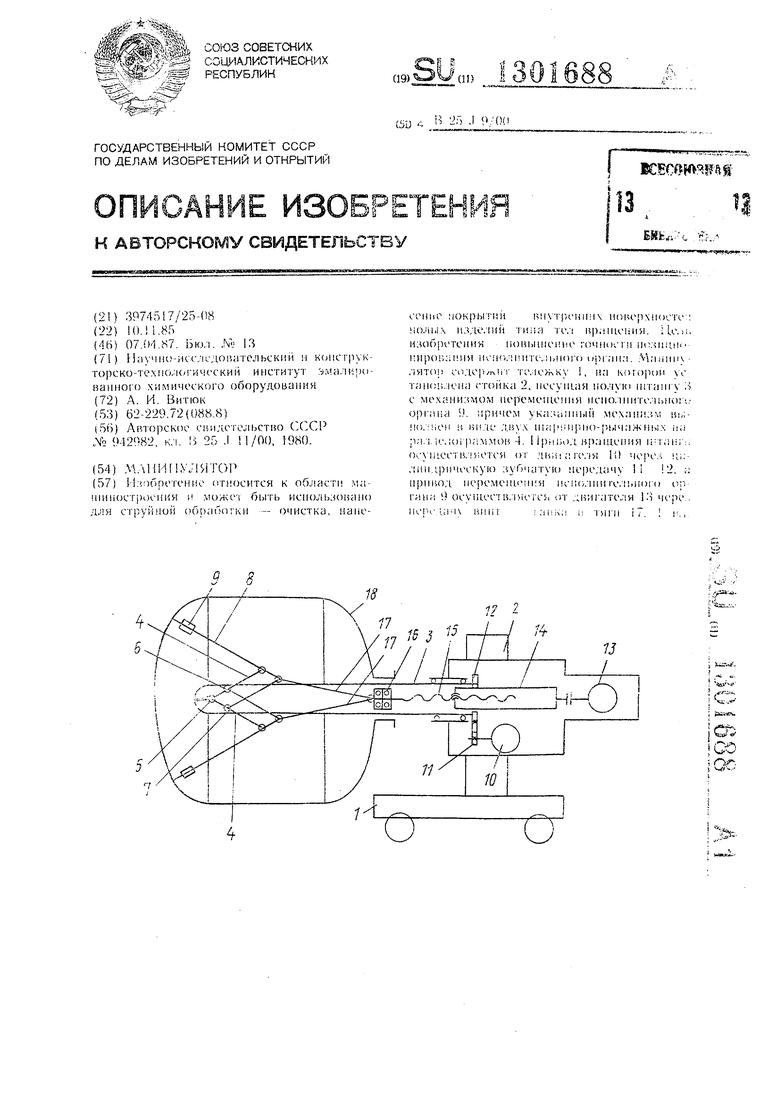
| Аторское , 1стельст1ю СССР ,NQ 942982, K.I | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
