(541 ШАГОВЫЙ КОНВЕЙЕР

| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВАЯ ТЕЛЕЖКА ПОДВЕСНОГО ТОЛКАЮЩЕГО | 1973 |
|
SU370125A1 |
| Скребковый конвейер | 1981 |
|
SU960099A1 |
| Устройство для упаковки стержнеобразных изделий | 1974 |
|
SU524737A1 |
| Поточная линия для обработки изделий | 1982 |
|
SU1081101A1 |
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Шаговый конвейер | 1977 |
|
SU745805A1 |
| Грузоведущий конвейер | 1990 |
|
SU1792895A1 |
| Горизонтально-замкнутый тележечный конвейер | 1980 |
|
SU977306A1 |
| Агрегатный станок | 1980 |
|
SU963813A2 |
| ГРУЗОВАЯ ТЕЛЕЖКА ПОДВЕСНОГО ТОЛКАЮЩЕГОКОНВЕЙЕРА | 1971 |
|
SU296690A1 |
1
изобретение относится к мапгиностроению, в частности к транспортным средствам машиностроительных предприятий для перемещения штучных грузов при межонерационных технологических процессах, и может найти широкое применение на предприятиях отраслей промышленности, где требуется перемещение грузов.
Известен шаговый конвейер, включающий привод, натяжное устройство, соединенное с тележкой тягового органа, тяговый орган, состояший из тележек, соединенных тягами, причем каждая тележка содержит корпус с роликами, перемещаюшимися по ходовому пути, упор с предохранительны.ми катками, а.мортизатор и систе.му рычагов 1.
Однако конвейер не обеспечивает работу в автоматическом режиме, что влечет использование ручных операций по стыковке захватного устройства с изделием и последующей расстыковке. При этом требуются изделия особой формы, необходимо увеличение затраты энергии для дополнительного привода захватного устройства, а наличие промежуточных эле.ментов делает конструкцию сложной и менее надежной в эксн,1 атации.
Наиболее близким техническим решение.м к изобретению яв,1яется ц аговый конвейер, содержаший основание, te неподвижных на правляющих которого на опорных катках т:тановлены подвижные П1танги с поворотными толкателями и упорами, и элемент нравления приводом 2.
Недостатком конвейера является то, что 10 он имеет сравнительно неудовлетворительную надежность за счет его конструктивных особенностей и жесткой работы в общей технологической ,1инии производства.
Цель изобретения - повышение надежности работы конвейера и расширение его функциональных возможностей при различных условиях производства.
Эта цель достигается тем, что шаговый конвейер, содержащий основание, в неподвижных направляющих которого на опорных катках установлены подвижные штанги с поворотными толкателями и упорами, и элемент управления приводом, снабжен подпружиненными ползунами с двуп,1ечими рычагами и закрепленными на ползунах ро.iMKiiMH. устлнонленными ii;i liiraiirax, ),iin.ii:- iii. i пазами, в которых )acii().io;-Kt иы ()/:.чунь:. причем каждый упор выполпс) ii РЛДс , и.чечсмч) рычага, uiapiiHpno связанlioro одним плечом с iioBCjpornbiM толкатг.1ем, а д 1угоС плечо устано 5лоп() с возможностью реве еивно1-о взаимодействия с элементом 1:равления приводом.
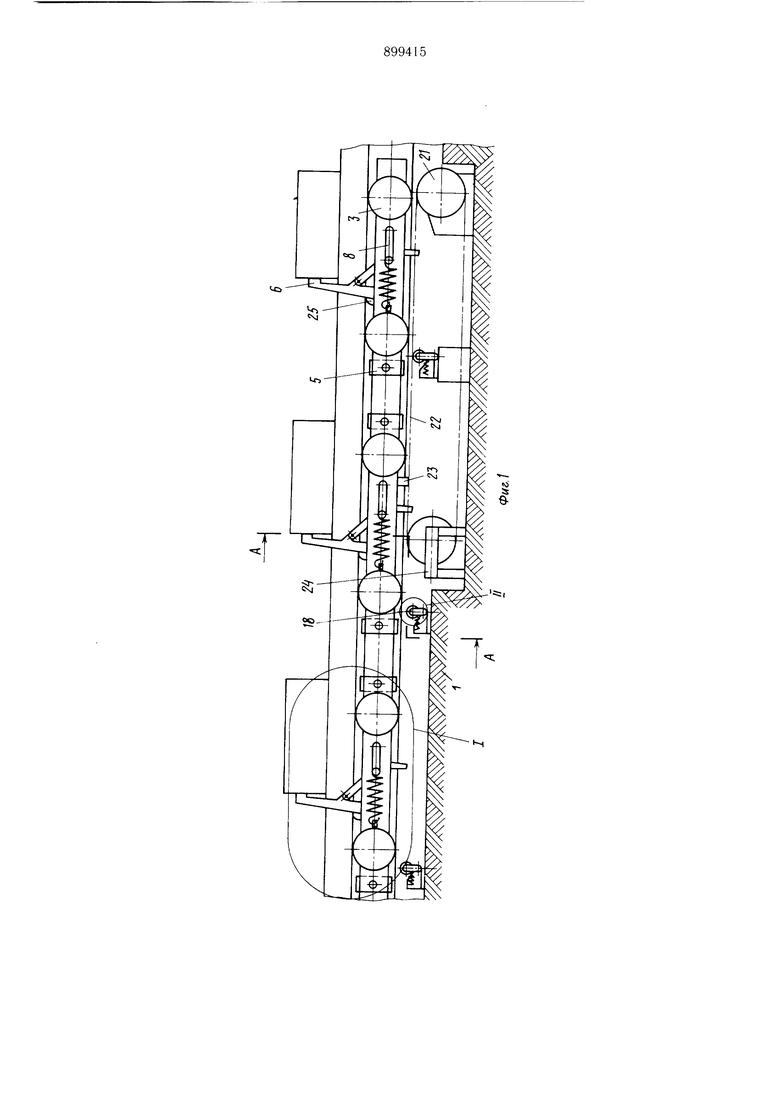
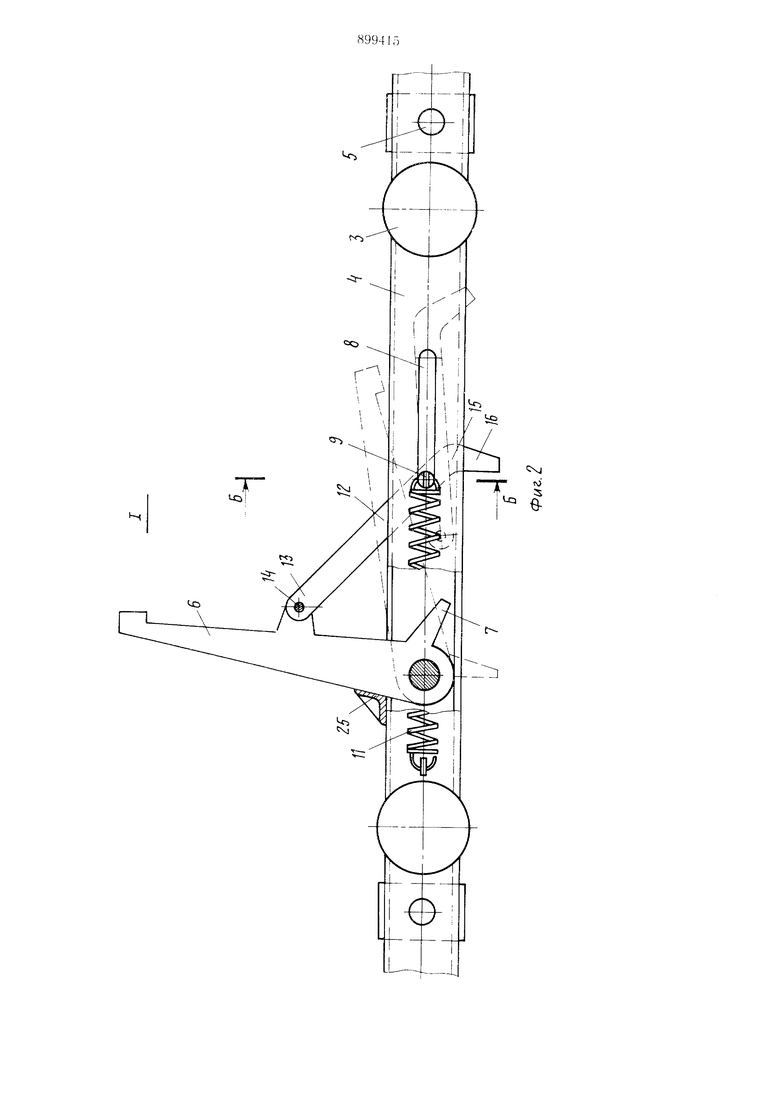
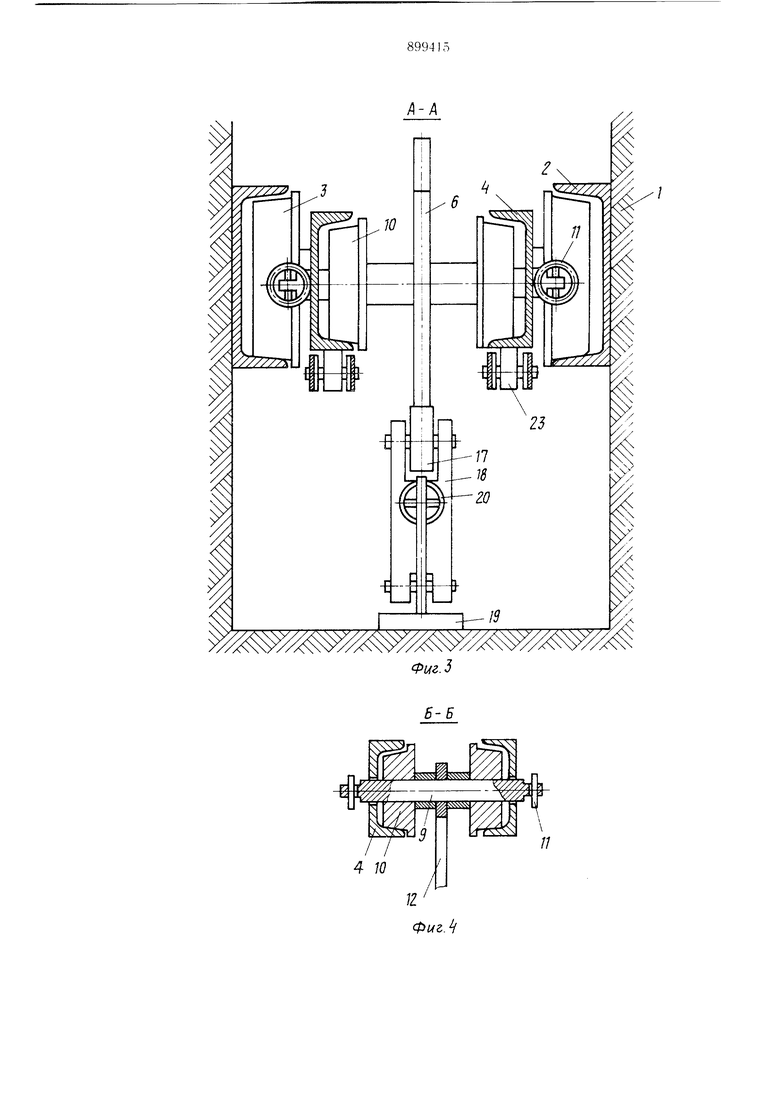
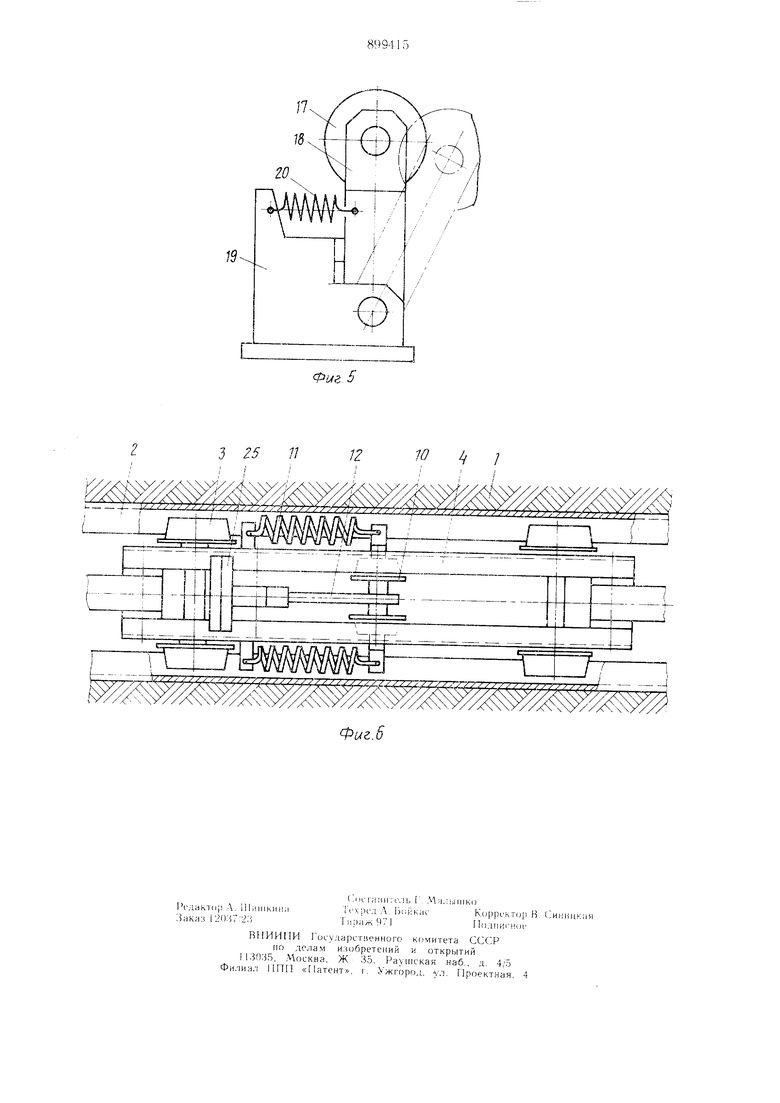
Па (. 1 изображен 11)едлагаемый niaг() конвейер. обн1ий вид; lia фиг. 2 узел 1 на фиг I: на фш. 3 разрез Л Л на (fiHi ; на (Ьиг. 4 - )азрез Б Б на ()иг. 2; на механ.ч;5м нерек.Т1оч(чня н)ииод;1 е его -лтементом .пения, общий вид; i;a фи1. В подвижная HiTaina, вид eiiepxv.
UlaroB,i лО11вейер сод.ержшоснование 1 с жестко i.jKjKMi.ieHHbiMh н нем 1анранляк:1Н1НМИ 2, 1. котор):х раено,1а1-аютея .;e кагкн 3, связанн1)1е ведлииин нод15ижными iHTaiiiaMH 4. Подвижпьче П тан1н 1 свя:1ань между e(j6oH нарниром 5. На HiTainax устано леи ))1Й то;|ка1е,1ь о е дк;|)ом 7 на конце, которьгй )аеположс-н нер11;-:11Д 1к Д1ярно оен то. ка Т:1я 6. Н каждой штапге 4 ньпюлпеп на;; 8 и н нем устапов.lei; no.Kiyii 9 на 1 одвн;+;}и-1х ;1олнках iO. евиза.чный Ii. Д|лн,1ечмй )ычаг 12 свои.м плечом 13 n()cpe;icTHjM нгариира 4 с;{я;ии1 с noBopoTHBiM олкателсм G, а другим нлечо-.м 1 о с упоро.м Н на его конце контактирует е IXVIUKOM 1Г элемента ун)а 1ЛеИИ.Я приводом, ,П1О,111ЯКН и1М }П),
,11очат1,:я. )рогный рычг-.г 18, нмеюн;ий ролик 17, связан с О110| ой 19 по |1едс1вом пружшь; 20. Oiic.ipa 19 .мехапи:5м;; де)ек,1 оче1;ия 1-тано 1,:нм1а на оегювании 1. ;iiiпод 21 ,. - iirofibiM opianoM 22 со Hi1анiaMH чод1и жных рам |К1С)едс гвом .мор, 23, а /кесткость тягового органа 22 обеенечинае патнжпоо уст)ойетво 24. Уп()) 25 жегтко ук)еи,тен на Н1тангах 4 и е,-1ужит для фике;1цни 11ово 1отного то,1кателя 6 в (абочем 1о,: ожении.
11агогИ)1Й ко1(р,е;йер |1аб()тае1 с,1ед тониг ; образо.м.
В исходном положении ловоротные TO;Iкатели {, занимают вертика,1ьное ноло:Кение до соприкосновения с упоро.м 25. При вк.чючении привода 21 происходит перемеп1е1 ие тягового органа 22, который посредством ; ажима 23 увлекает :ia собой и не(Н.меп1ает на опорных катках 3 но неподвижным направляющим 2 н танги 4, еоеди(1е11пые между собой Н1а};)ниром 5, и поворотные толкатели 6, 1)воротные то,ткате,1и 6 входят в контакт с .1иями и перемещают их на один aiai. При этом дви,жснии, во избежание заклинивания от встречн упора 16 двуп,течего рычага 12 с роликом 17, последний смо |тирован е поворотным рьн1агом 18, имеютцим niapHjrpHoe соедипе1{ие с опо{)ой 19.
его в исходное положение осущест(ляется с помощью пружины 20, Далее .фоне ходит автоматическое переключение привода 21 на обратный ход.
Тяговый орган 22 и штанги 4 с поворотHi iMH толкате:1ями 6 перемешаются в обратном иатфавлении. При это,м движении ро,::ик 17 с 11овор(;)тны.м рычагом 18 посреДстiiOM yn(;ipa 1(3 и илеча 15 двуплечего рычага 12 неремсчпают erti на роликах 10, Траектория движения двуплечего рычага 12 предопределяется пазом 8 и ползуном 9, Двуплечий 12 при 1 ереме цении через шарни) 14 илеча 13 утктекает за собой поворотный толкате.1ь 6, который под действие,м пружины 1 занимает наклонное положение, В таком положении тюворотные толкатели {) де.тают движение в обратном направлении на один Hiar, Зсггем происходит автоматическое ие)еключение привода 21 на первонача,л1)1ый ход. При этом перемещении пово|К)тн1)1Й )ычаг 18 юликом 17 через упор 7 новоротного то;1кателя б поворачивает пос, едний, кото)ый иод действием пружины 11 снова за)П1мает вертикальное тюложение,
/ia,:iee никл тювторяется.
Конструкция предлагаемого конвейера. иозво,.1иет ювысить на,чежность конвейера, а также исно;1ьзовать его для трансиортиро ки и;5делий веех типов, имеющих ходопые Ko;ieca, катк;.) и т. i;., а также транепортировать те,1ежки с грузом рельсового и 6e:i)e,;ii)COBoro T iaficno|)та.
Р op мул а изобретения
,1Й конвейер, С(1.ержаи1,ий оеноваиие, в ненодвижных нап)авляющих кото)ого tia oHCjptiNx катках установлены подвижные нТанги с поворотны.ми толкателя,ми и упорами, и э: емеит угфавления приводом, отличающийся тем, что, с целью повышения егг 1адежности, конвейер снабжен нодпружине11ными 11ол: унами с двуплечими рычагами и ;5ак)енле}|т1ыми на ползунах роликами, установленн1,1ми на штангах, выполненных с тазами, в которых расио южены ползуны, :1ричем каждый упор выполнен в виде двунлечего рычага, тпарнирно связанного одним Т1лечо 1 с поворотным толкателем, а другое плечо установлено е воз.можностью реверсивного взаимодейеткия с элементом управления приводом.
Источники информации, ттрипятые во внимание при экспертизе
2,Авторское свидетельство СССР
.YO 545535, кл. В 65 G 25/08, 1972 (прототип) .
Ы
/1-А
Фиг.З
