Изобретение относится к робототехнике, а именно к конструкции исполнительных органов роботов - манипуляторов, и может быть использовано для захвата деталей, имеющих малую жесткость,
Целью изобретения является повышение надежности удержания.
На фиг,1 показан ехват для захвата деталей за внешнюю поверхность; на фиг.2 - схват для захвата деталей за внутреннюю поверхность.
Схват содержит электроды 1 и 2, выполненные из электропроводного материала, покрытого диэлектриком (диэлектрик на чертеже не показан), выполненные в виде набора горизонтально расположенных пластин. Причем пластины одного электрода отогнуты от пластин другого электрода, Электроды 1 и 2 установлены в корпусе 3 и подключены к источнику питания (не показан), Захватывающая деталь обозначена позицией 4. Пластины электродов 1 и 2 выполнены с возможностью прогибания без остаточной деформации под действием сил электростатического воздействия, например, из пермаллоя.
Схват работает следующим образом. . - С помощью механизма (не показан) деталь вводится во внутреннюю полость схвата - см, фиг.1 (схват вводится во внутреннюю полость детали - см. фиг.2). Затем
электроды 1 и 2 подключают к источнику питания и между ними возникают электростатические силы притяжения, под действием которых электроды сближаются, обеспечивая надежный захват детали..
Степень прижатия пластин электродов 1 и 2 к поверхности захватываемой детали 4 может регулироваться напряжением питания. Для сброса детали производят отключение электродов от источника питания.
В предлагаемом схвате промышленного робота повышена надежность удержания захватываемой детали за счет увеличения пятка контакта между электродами и дета лями, так как оба электрода соприкасаются с захватываемой деталью.
Формула изобретения Схват промышленного робота, содержащий корпус с установленными на нем двумя пластинчатыми электродами, соединенными соответствующим образом с источником питания, отличающийся тем, .что, с целью повышения надежности в работе, он снабжен по крайней мере дополнительной парой электродов, при этом корпус выполнен цилиндрическим, а все электроды установлены попарно на его боковой поверхности перпендикулярно продольной оси корпуса, причем их свободные концы отогнуты друг от друга.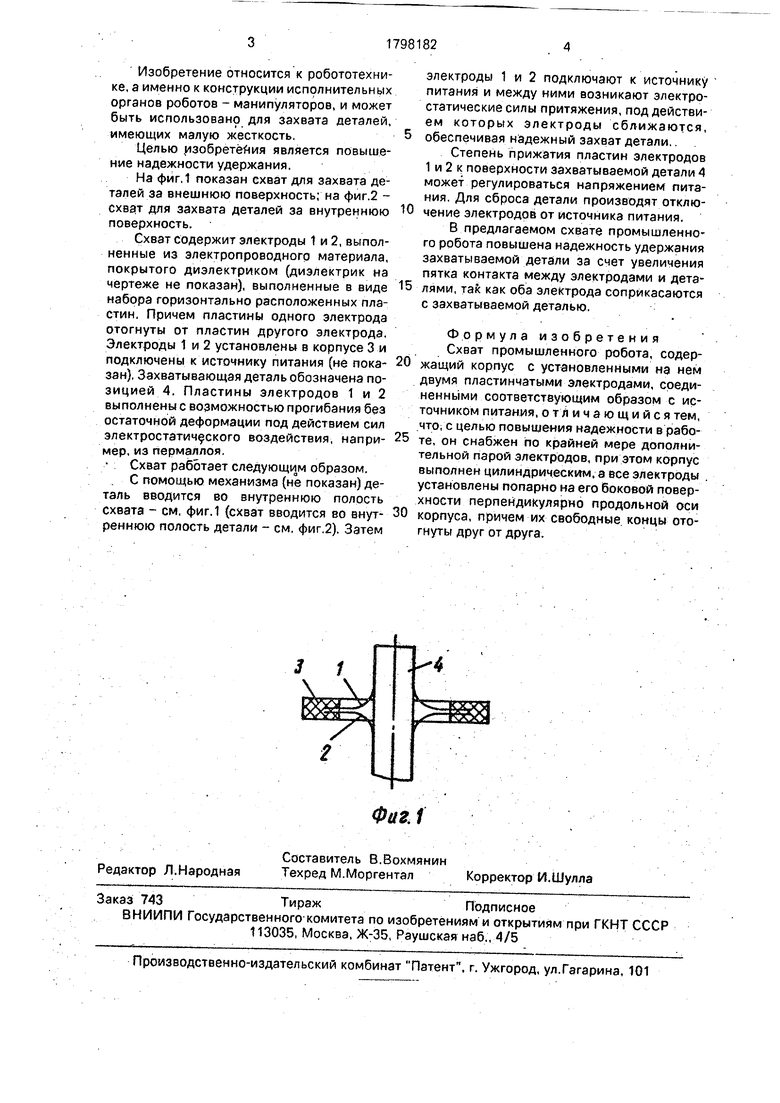
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота В.Г.Вохмянина | 1987 |
|
SU1505776A1 |
| Схват промышленного робота В.Г.Вохмянина | 1987 |
|
SU1442398A1 |
| Схват робота | 1984 |
|
SU1175692A1 |
| Электромагнитный самоустанавливающийся схват | 1990 |
|
SU1805033A1 |
| Схват манипулятора | 1987 |
|
SU1433794A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2004 |
|
RU2266190C1 |
| Устройство для размагничивания | 1988 |
|
SU1513531A1 |
| Схват робота | 1991 |
|
SU1821360A1 |
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2007 |
|
RU2352452C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СХВАТ | 2013 |
|
RU2529126C1 |
Использование: машиностроение, в захватных органах промышленных роботов. Сущность изобретения: схват содержит цилиндрический корпус с установленными попарно на его боковой поверхности перпендикулярно продольной оси корпуса пластинчатыми электродами. Свободные концы электродов отогнуты друг от друга. При подключении электродов к источнику питания между ними возникают электростатические силы притяжения. Под действием этих сил электроды сближаются и зажимают деталь, 2 ил.
| Схват промышленного робота В.Г.Вохмянина | 1987 |
|
SU1442398A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
