Изобретение относится к грузозахватным устройствам, предназначенным для штучных грузов.
Цель изобретения - повышение надежности работы устройства.
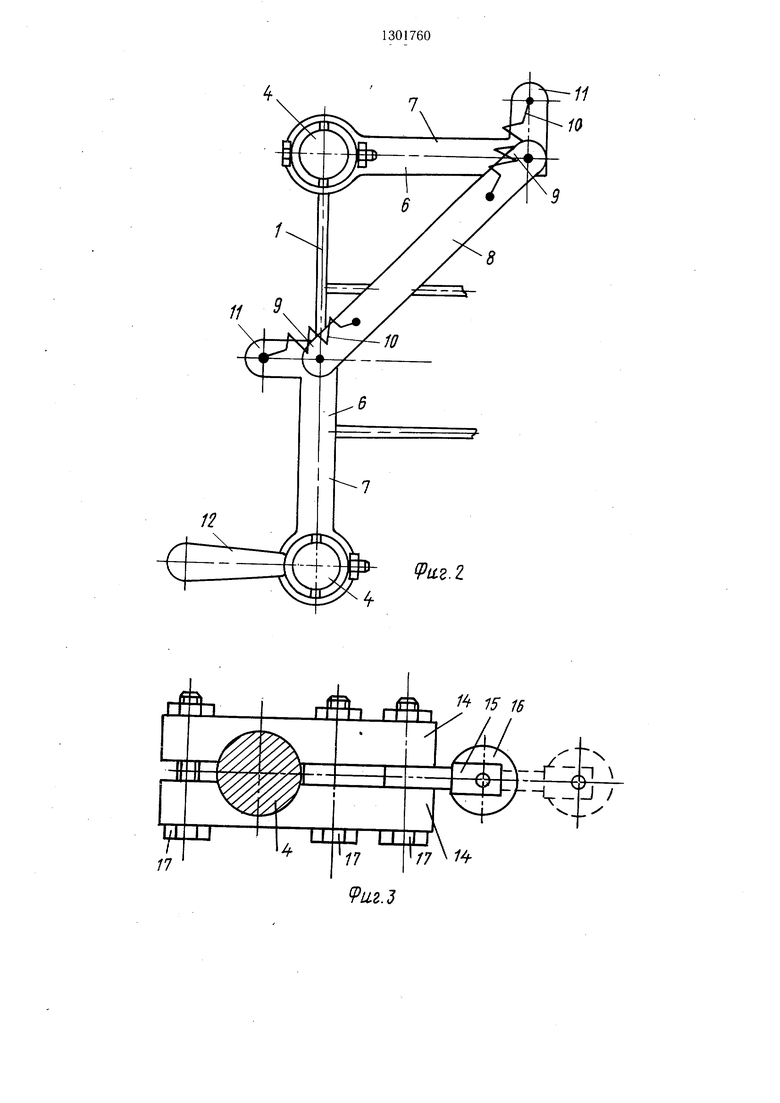
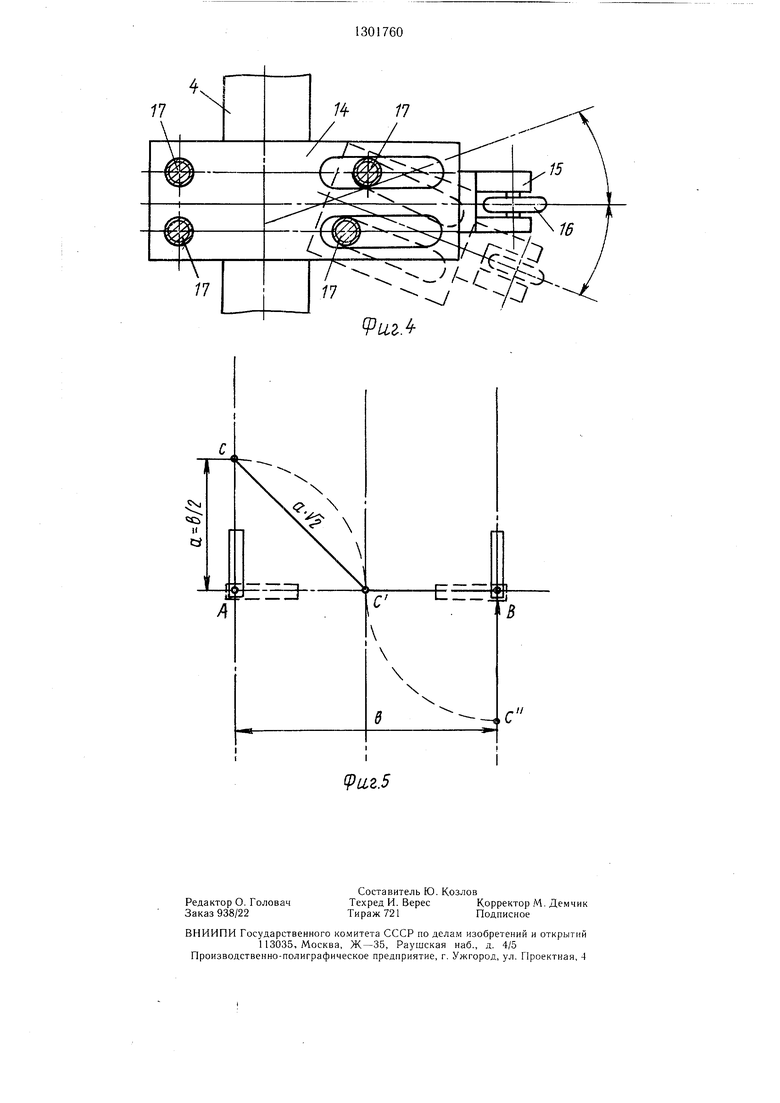
На фиг. 1 показано грузозахватное устройство, обШ,ий вид; на фиг. 2 - двух- кривошипный механизм поворота; на фиг. 3 - поворотный кронштейн, вид сверху; на фиг. 4 - то же, вид сбоку; на фиг. 5 -
Устройство работает следующим образом.
Предварительно выполняют настройку кронштейнов 13 по профилю и положению груза (например, турбинной лопатки). Для этого кронштейны 13 перемещают по высо- 5 те штанг 4, а также выдвигают и наклоняют пластины 15 с роликами 16 в продольных пазах с фиксацией их прижимными элементами 17.
В результате настройки устройства лапы
20
25
кинематическая схема двухкривошипного ме- ю 5 повернуты параллельно оси груза, грузозахватное устройство опускают сверху на захватываемый груз (турбинную лопатку), рукоятками ручного поворота механизма поворачивают штанги на 90°, в результате чего лапы 5 заходят под груз, а крон- 15 штейны 13 с роликами 16 ориентируют и зажимают груз.
Освобождение груза происходит в обратном порядке.
Использование предлагаемого устройства обеспечивает при надежном и быстром захватывании груза удобство захватывания турбинных лопаток из тары и свободно лежащих, так как груз удерживается роликами. Грузозахватное устройство можно быстро перенастроить на другой типоразмер детали сложной формы.
Формула изобретения
1.Грузозахватное устройство, содержащее несущую раму, установленные на ней с возможностью поворота пары вертикальных штанг с подхватными лапами и свя- занный с каждой парой штанг кривошип- но-шатунный механизм, отличающееся тем, что, с целью повышения надежности работы, кривошипы каждой пары штанг расположены перпендикулярно друг к другу, имеют длину, равную половине расстояния между соответствующими штангами, и подпружинены относительно шатуна.
2.Устройство по п. 1, отличающееся тем, что на каждой штанге установлены с возможностью поворота относительно нее выдвижные кронштейны с роликами на концах для взаимодействия с грузом.
ханизма поворота.
Грузозахватное устройство содержит раму 1, замок 2 для подсоединения к ма.- нипулятору, установленные на раме четыре втулки 3, в которых с возможностью поворота установлены четыре штанги 4 с подхватными лапами 5. На верхних концах штанг 4 установлены два двухкривошипных механизма 6 с кривошипами 7 и шарнир- но соединенными с ними щатунами 8. Для работы грузозахватного устройства необходимо, чтобы кривошипы АС и СВ (фиг. 4) равнялись половине межосевого расстояния В, а длина шатуна СС равнялась а-л1 (а - длина кривошипа), при таких условиях при повороте кривошипа С В на 90° шатун 8 обеспечивает поворот кривошипа АС на 90°, что дает возможность повернуть штанги 4 вместе с лапами 5 на 90°. Кривошипы 7 соединены с шатуном 8 и пружинным фиксатором 9, состоящим из двух пружин 10 растяжения, одним концом укрепленных на щатуне 8, а другим на боковом выступе 11 кривошипа 7. Один из кривошипов 7 содержит рукоятку 12 ручного поворота механизма.
На каждой штанге 4 с возможностью регулирования положения по высоте штанг 4 и длине лап 5 укреплены поворотно выдвижные кронштейны 13, состоящие из двух скоб 14 и пластины 15 с роликом 16. Скобы 14 и пластина 15 имеют продольные пазы, в которые вставлены прижимные элементы 17.
35
Устройство работает следующим образом.
Предварительно выполняют настройку кронштейнов 13 по профилю и положению груза (например, турбинной лопатки). Для этого кронштейны 13 перемещают по высо- те штанг 4, а также выдвигают и наклоняют пластины 15 с роликами 16 в продольных пазах с фиксацией их прижимными элементами 17.
В результате настройки устройства лапы
(Риг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1987 |
|
SU1618720A2 |
| Захват для листовой стали | 1977 |
|
SU753772A1 |
| Захватное устройство для плит | 1986 |
|
SU1393754A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| Захватное устройство | 1983 |
|
SU1181977A1 |
| Грузозахватное устройство | 1989 |
|
SU1691262A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
Изобретение относится к области подъемно-транспортного машиностроения, в частности к грузозахватным устройствам. Целью изобретения является повышение надежности в работе. Грузозахватное устройство содержит несущую раму I. На раме 1 установлены с возможностью поворота вертикальные штанги 4 с подхватными лапами 5. Со штангами связаны кривои1ИП110- шатунные механизмы 6. Криво1пипы 7 соединены с шатунами 8 пружинным фиксатором 9. Кривоппшы 7 расположены перпендикулярно друг к другу и имеют длину, равную половине расстояния между соот- ветствуюпхими штангами. На каждой П1тапге 4 установлены с воз.можпостью поворота выдвижные кронп|тейпы 13. Предпарптсльпо выполняют настройку кронштейнов 13 по профилю и положению груза. Штанги 4 поворачивают п кронштейны 13 ориентируют и зажимают груз. 1 з.п. ф-лы, 5 ил. € (Л 7V 00 vj 05 О -ч llJ-J- LJ (Pus.f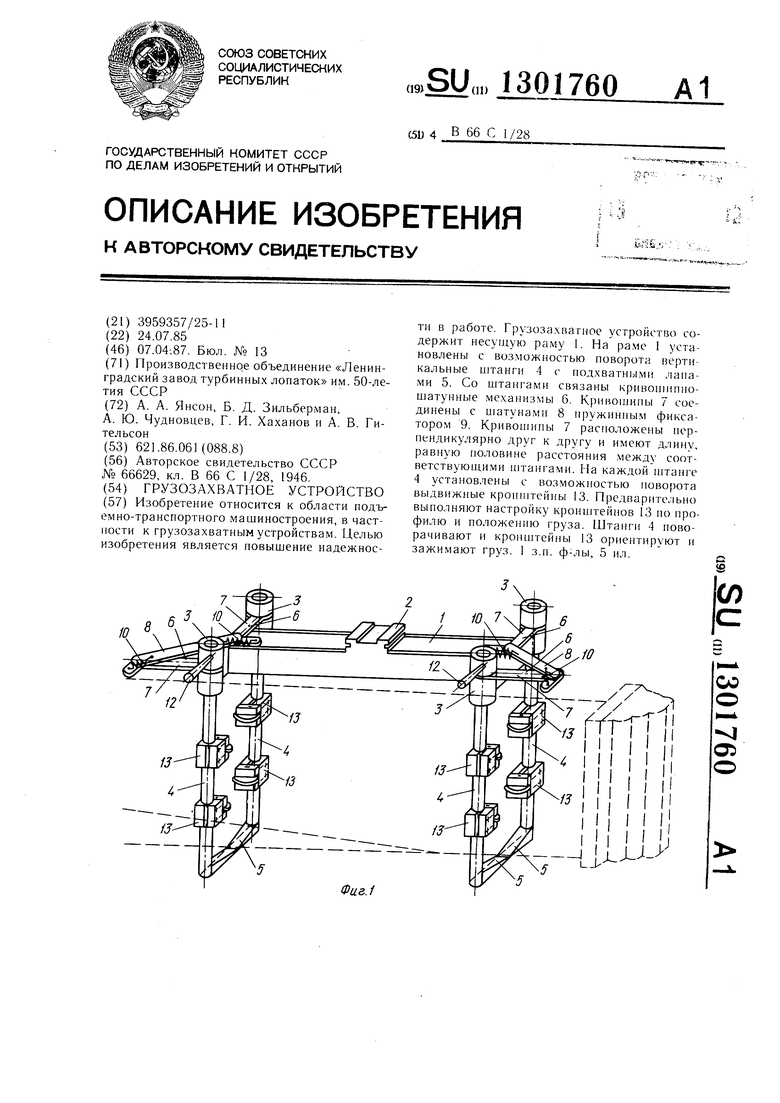
1 15 16
N
/
11
9иг.
(Раг.5
Составитель Ю. Козлов
Техред И. ВересКорректор -М. Демчик
Тираж 721Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Захват с лапами для подъема пакетов пиломатериалов и т.п. | 1941 |
|
SU66629A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
