О
о
N) С Ю
жении (утоплены в пазы). Устройство наводится на груз сверху вниз или горизонтально вдоль груза. При опускании устройства в результате контакта рамы А с грузом или стоек 5 с землей рама 4 останавливается, а рама 2 продолжает движение относительно рамы 4 до их соприкосновения. За счет срабатывания механизма 9 фиксации рамы расцепляются. При Лодъеме устройства рама 2 поднимается на максимальное расстояние относительно рамы 4. В этом положении штанги 3 освобождают «апы 6 и они под действием пружин 8 и Собственной массы приводятся в горизонтальное положение, упираясь в упорные пластины 10. При дальнейшем движении вверх лапы подхватывают груз. При освобождении устройства от груза работа проис- ходит в обратном порядке. Рама 4, коснувшись груза или земли, останавливается, а рама 2, продолжая движение вниз, штангами 3 приводит лапы 6 в вертикальное положение. Механизм 9 фиксирует исходное положение рам. В результате лапы 6 остаются в вертикальном положении. Устройство готово к освобождению от груза и захвату следующего, 1 з.п.ф-лы, 2 ил.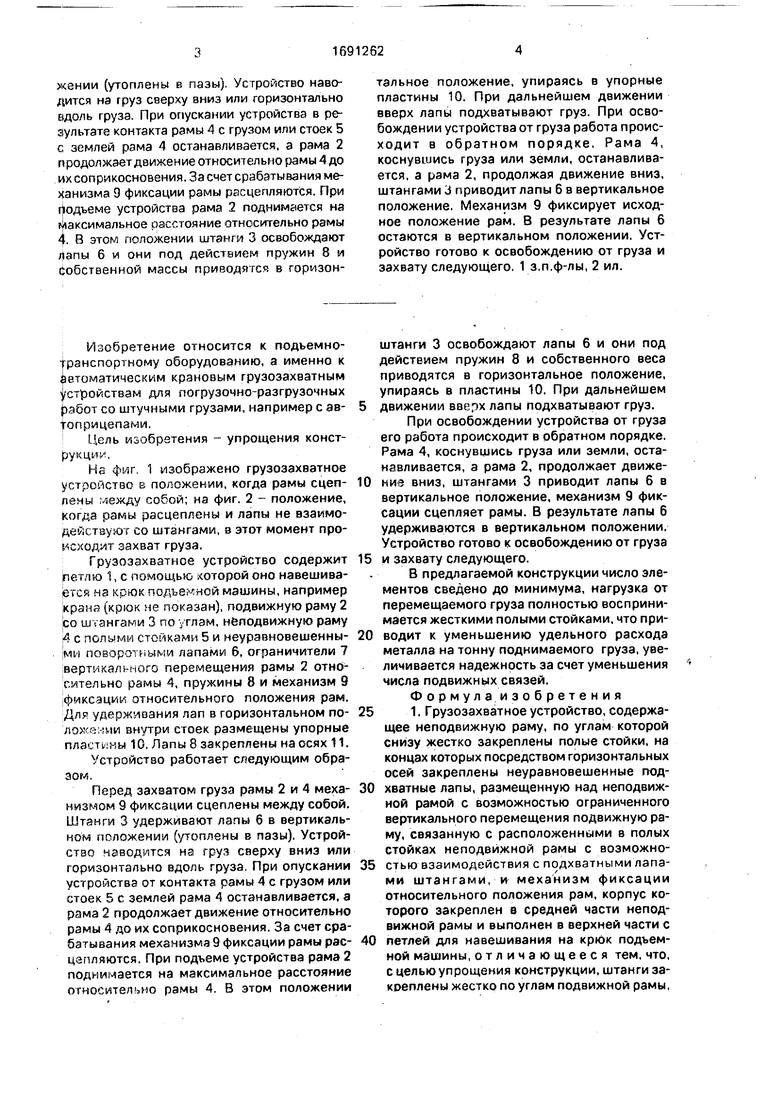
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват | 1971 |
|
SU537020A1 |
| Грузозахватное устройство | 1987 |
|
SU1643404A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Захватное устройство для грузов | 1978 |
|
SU821382A1 |
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство длягРузОВ C НЕСущиМ пОяСОМ | 1977 |
|
SU821383A1 |
| Захватно-разделительное устройство | 1981 |
|
SU1000373A1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
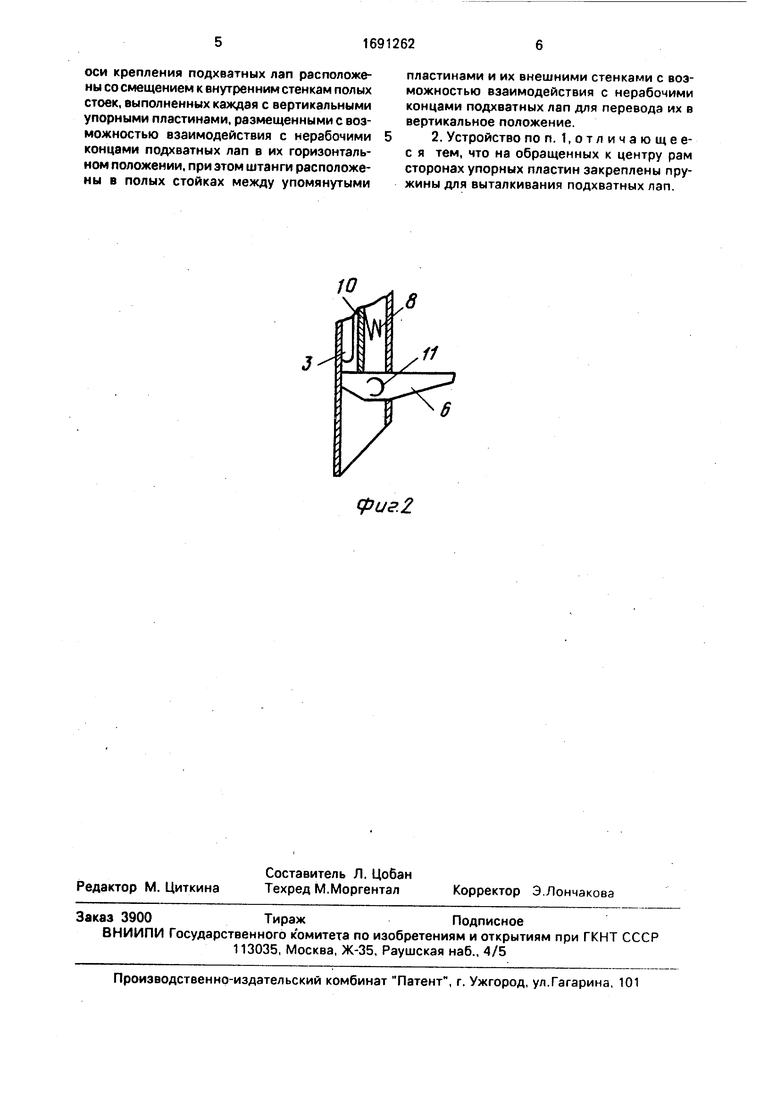
Изобретение относится к подъемно- транспортному оборудованию, а именно к крановым грузозахватным устройствам для погрузочно-разгрузочных работ. Цель изобретения - упрощение конструкции. Грузозахватное устройство содержит петлю 1 для навешивания на крюк подъемной машины, подвижную раму 2 со штангами 3 по углам, неподвижную раму 4 с полыми стойками 5 и поворотными лапами 6, ограничители 7 хода рамы 2 относительно рамы 4, пружины 8, механизм 9 фиксации положения рам. Для удержания лап в горизонтальном положении внутри стоек закреплены упорные пластины 10. Перед захватом груза рамы 2 и А механизмом 9 фиксации сцеплены, Штанги 3 удерживают лапы 6 в вертикальном поло
Изобретение относится к подьемно- ранспортному оборудованию, а именно к автоматическим крановым грузозахватным устройствам для погрузочно-разгрузочных работ со штучными грузами, например с ав- 1-оприцепами,
Цель изобретения - упрощения конструкции,
На фиг, 1 изображено грузозахватное устройство в положении, когда рамы сцеплены собой; на фиг. 2 - положение, Когда рамы расцеплены и лапы не взаимодействуют со штангами, в этот момент происходят захват груза.
Грузозахватное устройство содержит петлю 1, с помощью которой оно навешивается на крюк подъемной машины, например крана (крюк не показан), подвижную раму 2 со штангами 3 по углам, неподвижную раму 4 с полыми стойками 5 и неуравновешенными поворотными лапами 6, ограничители 7 вертикального перемещения рамы 2 относительно рамы 4, пружины 8 и механизм 9 фиксации относительного положения рам. Для удерживания лап в горизонтальном по- лохм.иии внутри стоек размещены упорные пластины 10. Лапы 8 закреплены на осях 11.
Устройство работает следующим обра- эом,
Перед захватом груза рамы 2 и 4 механизмом 9 фиксации сцеплены между собой. Штанги 3 удерживают лапы 6 в вертикальном положении (утоплены в пазы). Устройство наводится на груз сверху вниз или горизонтально вдоль груза, При опускании устройства от контакта рамы 4 с грузом или стоек 5 с землей рама 4 останавливается, а рама 2 продолжает движение относительно рамы 4 до их соприкосновения. За счет срабатывания механизма 9 фиксации рамы расцепляются. При подъеме устройства рама 2 поднимается на максимальное расстояние относительно рамы 4. В этом положении
штанги 3 освобождают лапы 6 и они под действием пружин 8 и собственного веса приводятся в горизонтальное положение, упираясь в пластины 10. При дальнейшем
движении вверх лапы подхватывают груз.
При освобождении устройства от груза его работа происходит в обратном порядке. Рама 4, коснувшись груза или земли, останавливается, а рама 2, продолжает движениз вниз, штангами 3 приводит лапы 6 в вертикальное положение, механизм 9 фиксации сцепляет рамы. В результате лапы 6 удерживаются в вертикальном положении. Устройство готово к освобождению от груза
и захвату следующего.
В предлагаемой конструкции число элементов сведено до минимума, нагрузка от перемещаемого груза полностью воспринимается жесткими полыми стойками, что приводит к уменьшению удельного расхода металла на тонну поднимаемого груза, увеличивается надежность за счет уменьшения числа подвижных связей.
Формула изобретения
петлей для навешивания на крюк подъемной машины, отличающееся тем, что, с целью упрощения конструкции, штанги за- коеплены жестко по углам подвижной рамы,
оси крепления подхватных лап расположены со смещением к внутренним стенкам полых стоек, выполненных каждая с вертикальными упорными пластинами, размещенными с возможностью взаимодействия с нерабочими концами подхватных лап в их горизонтальном положении, при этом штанги расположены в полых стойках между упомянутыми
пластинами и их внешними стенками с возможностью взаимодействия с нерабочими концами подхватных лап для перевода их в вертикальное положение.
Фиг2
| Козлов Ю.Т | |||
| и др | |||
| Грузозахватные устройства: Справочник | |||
| М.: Транспорт, 1980, с | |||
| Счетный сектор | 1919 |
|
SU107A1 |
